 |


Зараждение кибирнетики как науки.
|
|
|
|
Содержание.
Содержание. 2
Введение. 3
1. Развитие кибернетики. 4
1.1. История кибирнетики. 4
1.2. Зараждение кибирнетики как науки. 6
2. Предмет, методы и цели кибернетики. 10
2.1. Предметы изучения кибернетики. 10
2.2. Методы изучения кибернетики. 10
2.2.1. Математический анализ. 10
2.2.2. Физический эксперимент. 11
2.2.3. Вычислительный эксперимент. 11
2.3 Цели кибернетики. 11
3. Кибирнетика и компьютеры. 12
4. Управление в кибернетических системах. 13
4.1. Основные виды систем управления. 13
4.1.1. Программное управление. 14
4.1.2. Авторегулирование. 14
4.1.3. Следящая система управления. 15
4.1.4. Система оптимального управления. 15
4.1.5. Ультраустойчивая система. 15
4.1.5. Мультиустойчивая система. 16
5. Сферы деятельности кибернетики. 17
5.1. Теоретическая кибернетика. 17
5.1.1 Техническая кибернетика. 17
5.1.2 Биологическая кибернетика. 18
5.1.3. Социальная кибернетика. 18
Заключение. 20
Предметный указатель. 21
Список изображений. 22
Список литературы. 23
Введение.
Современное поколение является свидетелем стремительного развития науки и техники. За последние триста лет человечество прошло путь от простейших паровых машин до мощных атомных электростанций, овладело сверхзвуковыми скоростями полета, поставило себе на службу энергию рек, создало огромные океанские корабли и гигантские землеройные машины, заменяющие труд десятков тысяч землекопов. Запуском первого искусственного спутника Земли и полетом первого человека в космос люди проложили путь к освоению космического пространства. Однако до середины XX века почти все создаваемые человеком механизмы предназначались для выполнения хотя и весьма разнообразных, но в основном исполнительных функций. Их конструкция предусматривала всегда более или менее сложное управление, осуществляемое человеком, который должен оценивать внешнюю обстановку, внешние условия, наблюдать за ходом того или иного процесса и соответственно управлять машинами, движением транспорта и т. д.
|
|
|
Область умственной деятельности, психики, сфера логических функций человеческого мозга казались до недавнего времени совершенно недоступными механизации. Рисуя картины жизни будущего общества, авторы фантастических рассказов и повестей часто представляли, что всю работу за человека будут выполнять машины, а роль человека сведется лишь к тому, чтобы, наблюдая за работой этих машин, нажимать на пульте соответствующие кнопки, управляющие определенными операциями. Однако современный уровень развития радиоэлектроники позволяет ставить и разрешать задачи создания новых устройств, которые освободили бы человека от необходимости следить за производственным процессом и управлять им, т. е. заменили бы собой оператора, диспетчера.
Появился новый класс машин — управляющие машины, способные выполнять самые разнообразные и часто весьма сложные задачи управления производственными процессами, движением транспорта и т. д. Создание управляющих машин позволяет перейти от автоматизации отдельных станков и агрегатов к комплексной автоматизации конвейеров, цехов, целых заводов. Вычислительная техника используется не только для управления технологическими процессами и решения многочисленных трудоемких научно-теоретических и конструкторских вычислительных задач, но и в сфере управления народным хозяйством, экономики и планирования.[1]
Развитие кибернетики.
Кибернетика — это наука об общих закономерностях процессов управления и передачи информации в различных системах. Это если говорить в общем. Но простой обыватель понимает под кибернетикой работу с информационными системами, связанными с кодированием тех или иных данных в те или иные структуры. К примеру, создание робота не может обойтись без кибернетики — по сути, робототехника вышла из кибернетики. Кибернетика это, по большей части, производное информатики, которая, в свою очередь, также является наукой о создании и организации информационных систем. В настоящее время кибернетика широко используется во всех сферах человеческой жизни: от политики и экономики до программирования на генетическом уровне. [2]
|
|
|
История кибирнетики.
В Древней Греции термин «кибернетика», изначально обозначавший искусство кормчего[1], стал использоваться в переносном смысле для обозначения искусства государственного деятеля, управляющего городом. Первая искусственная автоматическая регулирующая система, клепсидра- водяные часы (см. рис 1), была изобретена древнегреческим механиком Ктезибием[2].

В его водяных часах вода вытекала из источника, такого как стабилизирующий бак, в бассейн, затем из бассейна — на механизмы часов. Устройство Ктезибия использовало конусовидный поток для контроля уровня воды в своём резервуаре и регулировки скорости потока воды соответственно, чтобы поддержать постоянный уровень воды в резервуаре, так, чтобы он не был ни переполнен, ни осушен. Это было первым искусственным действительно автоматическим саморегулирующимся устройством, которое не требовало никакого внешнего вмешательства между обратной связью[3] и управляющими механизмами. Хотя они, естественно, не ссылались на это понятие как на науку кибернетику (они считали это областью инженерного дела), Ктезибий и другие мастера древности, такие как Герон Александрийский[4] или китайский учёный Су Сун[5], считаются одними из первых, изучавших кибернетические принципы.
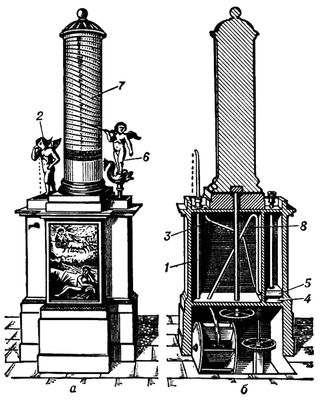
Исследование механизмов в машинах с корректирующей обратной связьюдатируется ещё концом XVIII века, когда паровой двигатель Джеймса Уатта[6] был оборудован управляющим устройством, центробежным регулятором[7] (см. рис. 2) обратной связи для того, чтобы управлять скоростью двигателя.
 В 1868 году великий физик Дж. Максвелл[8] опубликовал теоретическую статью по управляющим устройствам, одним из первых рассмотрел и усовершенствовал принципы саморегулирующихся устройств. Я. Икскюль[9] применил механизм обратной связи в своей модели функционального цикла (нем. Funktionskreis) для объяснения поведения животных. [3]
В 1868 году великий физик Дж. Максвелл[8] опубликовал теоретическую статью по управляющим устройствам, одним из первых рассмотрел и усовершенствовал принципы саморегулирующихся устройств. Я. Икскюль[9] применил механизм обратной связи в своей модели функционального цикла (нем. Funktionskreis) для объяснения поведения животных. [3]
|
|
|
 Известный французский ученый-физик А. М. Ампер[10] (1775—1836 гг.) в своей работе «Опыт о философии наук, или Аналитическое изложение естественной классификации всех человеческих знаний», первая часть которой вышла в 1834 г., назвал кибернетикой науку о текущем управлении государством (народом), которая помогает правительству решать встающие перед ним конкретные задачи с учетом разнообразных обстоятельств в свете общей задачи обеспечить стране мир и процветание. Однако вскоре термин «кибернетика» был забыт и возрожден позже Норбертом Винером[11] в качестве названия науки об управлении техническими, биологическими и социальными системами. [2]
Известный французский ученый-физик А. М. Ампер[10] (1775—1836 гг.) в своей работе «Опыт о философии наук, или Аналитическое изложение естественной классификации всех человеческих знаний», первая часть которой вышла в 1834 г., назвал кибернетикой науку о текущем управлении государством (народом), которая помогает правительству решать встающие перед ним конкретные задачи с учетом разнообразных обстоятельств в свете общей задачи обеспечить стране мир и процветание. Однако вскоре термин «кибернетика» был забыт и возрожден позже Норбертом Винером[11] в качестве названия науки об управлении техническими, биологическими и социальными системами. [2]
Зараждение кибирнетики как науки.
Современная кибернетика началась в 1940-х как междисциплинарная область исследования, объединяющая системы управления, теории электрических цепей, машиностроение, логическое моделирование, эволюционную биологию, неврологию. Системы электронного управления берут начало с работы инженера Bell Labs[12] Гарольда Блэка[13] в 1927 году по использованию отрицательной обратной связи, для управления усилителями. [3]

 Многочисленные работы появились в смежных областях. В 1935 году российский физиолог П. К. Анохин[14]издал книгу, в которой было изучено понятие обратной связи («обратная афферентация»). Исследования продолжались, в особенности в области математического моделирования регулирующих процессов, и две ключевые статьи были опубликованы в 1943 году. Этими работами были «Поведение, цель и телеология», Норберта Винера и работа «Логическое исчисление идей, относящихся к нервной активности» У. Мак-Каллока[15] и У. Питтса[16].
Многочисленные работы появились в смежных областях. В 1935 году российский физиолог П. К. Анохин[14]издал книгу, в которой было изучено понятие обратной связи («обратная афферентация»). Исследования продолжались, в особенности в области математического моделирования регулирующих процессов, и две ключевые статьи были опубликованы в 1943 году. Этими работами были «Поведение, цель и телеология», Норберта Винера и работа «Логическое исчисление идей, относящихся к нервной активности» У. Мак-Каллока[15] и У. Питтса[16].
В начале 1940-х Джон фон Нейман[17](рис3), более известный работами по математике и информатике, внёс уникальное и необычное дополнение в мир кибернетики: понятие клеточного автомата(дискретной модели, изучаемой в математике, теории вычислимости, физике, теоретической биологии и микромеханике, включает регулярную решётку ячеек, каждая из которых может находиться в одном из конечного множества состояний, таких как 1 и 0.) и «универсального конструктора» (самовоспроизводящегося клеточного автомата). Результатом этих обманчиво простых мысленных экспериментов стало точное понятие самовоспроизведения, которое кибернетика приняла как основное понятие. Понятие, что те же самые свойства генетического воспроизводства относились к социальному миру, живым клеткам и даже компьютерным вирусам, является дальнейшим доказательством универсальности кибернетических исследований. [3] Он внес фундаментальный вклад в область теории множеств, функционального анализа, квантовой механики, статистической физики, математической логики теории автоматов, вычислительной техники. Благодаря ему получили развитие новые идеи в области этих научных направлений. Д. фон Нейман в середине 40-х годов разработал первую цифровую ЭВМ в США. Он — создатель новой математической науки — теории игр, непосредственно связанной с теоретической кибернетикой. Им разработаны пути построения сколь угодно надежных систем из ненадежных элементов и доказана теорема о способности достаточно сложных автоматов к самовоспроизведению и к синтезу более сложных автоматов. [4]
|
|
|
Появление кибернетики как самостоятельного научного направления относится к 1948 г. и пренадлежит америкаскому ученому, профессору математики Массачусетского технологического института Норберту Винеру (Рис 4).

 Весной 1947 года Винер был приглашён на конгресс по гармоническому анализу[18], проведённому в Нанси, Франция. Во время этого пребывания во Франции Норберт Винер получил предложение написать сочинение на тему объединения этой части прикладной математики, которая найдена в исследовании броуновского движения[19] и в теории телекоммуникаций. Следующим летом, уже в Соединённых Штатах, он использовал термин «кибернетика» как заглавие научной теории. Это название было призвано описать изучение «целенаправленных механизмов» и было популяризировано в книге «Кибернетика, или управление и связь в животном и машине» (Hermann & Cie, Париж, 1948). В этой книге Винер обобщил закономерности, относящиеся к системам управления различной природы — биологическим, техническим и социальным. [2] [3]
Весной 1947 года Винер был приглашён на конгресс по гармоническому анализу[18], проведённому в Нанси, Франция. Во время этого пребывания во Франции Норберт Винер получил предложение написать сочинение на тему объединения этой части прикладной математики, которая найдена в исследовании броуновского движения[19] и в теории телекоммуникаций. Следующим летом, уже в Соединённых Штатах, он использовал термин «кибернетика» как заглавие научной теории. Это название было призвано описать изучение «целенаправленных механизмов» и было популяризировано в книге «Кибернетика, или управление и связь в животном и машине» (Hermann & Cie, Париж, 1948). В этой книге Винер обобщил закономерности, относящиеся к системам управления различной природы — биологическим, техническим и социальным. [2] [3]
Винер популяризировал социальные значения кибернетики, проведя аналогии между автоматическими системами (такими как регулируемый паровой двигатель) и человеческими институтами в его бестселлере «Кибернетикаи общество» (The Human Use of Human Beings: Cybernetics and Society Houghton-Mifflin, 1950). [3]
|
|
|
Интенсивное развитие кибернетики в нашей странесвязано с деятельностью таких крупных ученых, как академик А. И. Берг[20]— выдающийся ученый, организатор и руководитель Научного совета по кибернетике АН СССР[21]. Академик В. М. Глушков [22]— математик и автор ряда работ по кибернетике, теории конечных автоматов, теоретическим и практическим проблемам автоматизированных систем управления. Академик В. А. Котельников[23], разработавший ряд важнейших проблем теории информации. Академик С. А. Лебедев[24], под руководством которого был создан ряд быстродействующих ЭВМ. член-корреспондент АН СССР. А. А. Ляпунов [25]—талантливый математик, сделавший очень много для распространения идей кибернетики в нашей стране, и многих других. [4]
Становление и успешное развитие любого научного направления связаны, с одной стороны, с накоплением достаточного количества знаний, на базе которых может развиваться данная наука, с другой — с потребностями общества в ее развитии. Поэтому неслучайно размышления о кибернетике Платона и Ампера не получили в свое время дальнейшего развития и были, в сущности, забыты. Достаточно солидная научная база для становления кибернетики создавалась лишь в течение XIX—XX веков, а технологическая база непосредственно связана с развитием электроники за период последних 50—60 лет.
Социальная потребность в развитии кибернетикина современной ступени общественного развития определяется прежде всего бурным ростом технологического уровня производства, в результате чего доля суммарных физических усилий человека и животных составляет в настоящее время менее 1% мирового энергетического баланса. Снижение данной величины обусловлено стремительным ростом энерговооруженности[26] работников физического труда, сопровождающимся и значительным повышением его производительности. Вместе с тем управление современной техникой требует все больших затрат нервной энергии, а психофизические возможности человека ограничены, поэтому оказывается, что именно они в значительной степени ограничивали полноценное использование достижений технического прогресса. С другой стороны, в развитых странах доля работников умственного труда по отношению ко всем работающим приближается уже к 50%, причем дальнейшее возрастание ее является объективным законом общественного развития. А производительность умственного труда, в процессе которого до недавнего времени использовались лишь самые примитивные технические средства повышения его эффективности (арифмометры, конторские счеты, логарифмические линейки, пишущие машинки), практически оставалась на уровне XIX века. Если учитывать также непрерывное возрастание сложности технологических процессов, характеризующихся большим количеством разнообразных показателей, то становится ясным, что отсутствие механизации информационных процессов тормозит дальнейший научно-технический прогресс.
Перечисленные факторы в совокупности и обусловили быстрое развитие кибернетики и ее технической базы - кибернетической техники. Необходимость или целесообразность замещения человека автоматом определяется одной из следующих причин. Во-первых, функционирование объекта управления может характеризоваться такими большими скоростями, что человек в силу нейрофизиологических ограничений скорости своей реакции не может достаточно быстро, в темпе функционирования объекта или, как принято говорить, в реальном масштабе времени, осуществлять необходимые управляющие воздействия. Данное ограничение относится в той или иной мере, например, к процессам управления самолетами, космическими кораблями, ракетами, атомными и химическими реакциями. Во-вторых, управляющий автомат оказывается необходимым, когда управление должно осуществляться в тех местах, где присутствие человека либо невозможно, либо связано с большими трудностями и затратами (космические аппараты, другие планеты, опасные и вредные производственные помещения), а телеуправление по тем или иным причинам невозможно или нецелесообразно. В-третьих, в ряде производственных процессов автоматическое управление способно обеспечить более высокие показатели точности изготовления изделий и улучшение других качественных показателей. Наконец, в-четвертых, даже и в тех случаях, когда человек может успешно управлять некоторым производственным процессом, применение управляющих автоматов даст значительный экономический эффект за счет существенного снижения трудовых затрат. [1]
|
|
|
