 |


Управление в кибернетических системах.
|
|
|
|
Изменение поведения вычислительной машины определяется человеком, меняющим программы ее работы. Можно, однако, составить программу изменения программы работ ЭВМ и организовать ее общение с внешней средой через соответствующую систему рецепторов и эффекторов. Таким образом, можно моделировать различные формы изменения поведения и развития, наблюдающиеся в сложных биологических и социальных системах. Изменение поведения сложных кибернетических систем есть результат накопления обработанной соответствующим образом информации, которую эти системы получили в прошлом.
В зависимости от формы, в которой происходит «запоминание» информации, различают два основных типа изменения поведения систем — самонастройкуи самоорганизацию.
В самонастраивающихся системах накопление опыта выражается в изменении значений тех или иных параметров, в самоорганизующихся — в изменении структуры системы. На практике обычно самонастройка связывается с изменениями относительно небольшого числа непрерывных параметров.

 Что же касается глубоких изменений структуры рабочих программ (которые можно трактовать как изменения состояний большого числа дискретных элементов памяти), то их более естественно рассматривать как пример самоорганизации. Целенаправленное изменение поведения кибернетических систем происходит при наличии управления. Цели управления сильно меняются в зависимости от типа систем и степени их сложности. В простейшем случае такой целью может быть поддержание постоянства значения того или иного параметра. Для более сложных систем в качестве целей возникают задачи приспособления к меняющейся среде и даже познания законов таких изменений.
Что же касается глубоких изменений структуры рабочих программ (которые можно трактовать как изменения состояний большого числа дискретных элементов памяти), то их более естественно рассматривать как пример самоорганизации. Целенаправленное изменение поведения кибернетических систем происходит при наличии управления. Цели управления сильно меняются в зависимости от типа систем и степени их сложности. В простейшем случае такой целью может быть поддержание постоянства значения того или иного параметра. Для более сложных систем в качестве целей возникают задачи приспособления к меняющейся среде и даже познания законов таких изменений.
|
|
|
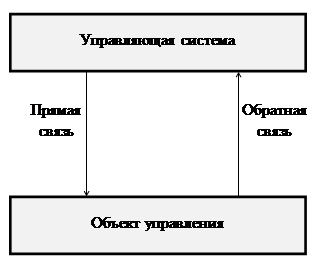
Наличие управления в кибернетической системе означает, что ее можно представить в виде двух взаимодействующих блоков — объекта управления и управляющей системы. Управляющая система по каналам прямой связи[27] через соответствующее множество эффекторов передает управляющие воздействия на объект управления. Информация о состоянии объекта управления воспринимается с помощью рецепторов и передается по каналам обратной связи[28] в управляющую систему. (см рис. 6)
Основные виды систем управления.
Описанная система с управлением может, как и всякая кибернетическая система, может иметь также каналы связи (с соответствующими системами рецепторов и эффекторов) с окружающей средой. В простейших случаях среда может выступать как источник различных помех и искажений в системе (чаще всего в канале обратной связи). В задачу управляющей системы входит тогда фильтрация помех. Особо важное значение эта задача приобретает при дистанционном (телемеханическом) управлении, когда сигналы передаются по длинным каналам связи. Основной задачей управляющей системы является такое преобразование поступающей в систему информации и формирование таких управляющих воздействий, при которых обеспечивается достижение (по возможности наилучшее) целей управления. По виду таких целей и характеру функционирования управляющей системы различают следующие основные типы управления.
Программное управление.
Одним из простейших видов управления является программное управление. Цель такого управления состоит в том, чтобы выдать на объект управления ту или иную строго определенную последовательность управляющих воздействий. Обратная связь при таком управлении отсутствует. Наиболее простым примером подобного программного управления является светофор-автомат, переключение которого происходит в заданные заранее моменты времени. Более сложное управление светофором (при наличии счетчиков подъезжающих машин) может включать простейший «пороговый» сигнал обратной связи: переключение светофора происходит всякий раз, когда количество ждущих автомашин превысит заданную величину.
|
|
|
Авторегулирование.
Весьма простым видом управления является также классическое авторегулирование, цель которого состоит в поддержании постоянного значения того или иного параметра (или нескольких независимых параметров). Примером может служить система автоматического регулирования температуры воздуха в помещении: специальный термометр-датчик измеряет температуру воздуха Т, управляющая система сравнивает эту температуру с заданной величиной  и формирует управляющее воздействие —
и формирует управляющее воздействие —  на задвижку, регулирующую приток теплой воды в батареи центрального отопления. Знак минус при коэффициенте k означает, что регулирование происходит по закону отрицательной обратной связи, а именно: при увеличений температуры Т выше установленного порога приток тепла уменьшается, при ее падении ниже порога — возрастает. Отрицательная обратная связь[29] необходима для обеспечения устойчивости процесса регулирования. Устойчивость системы означает, что при отклонении от положения равновесия (когда
на задвижку, регулирующую приток теплой воды в батареи центрального отопления. Знак минус при коэффициенте k означает, что регулирование происходит по закону отрицательной обратной связи, а именно: при увеличений температуры Т выше установленного порога приток тепла уменьшается, при ее падении ниже порога — возрастает. Отрицательная обратная связь[29] необходима для обеспечения устойчивости процесса регулирования. Устойчивость системы означает, что при отклонении от положения равновесия (когда  ) как в одну, так и в другую сторону система стремится автоматически восстановить это равновесие.
) как в одну, так и в другую сторону система стремится автоматически восстановить это равновесие.
При простейшем предположении о линейном характере зависимости между управляющим воздействием и скоростью притока тепла в помещение работа такого регулятора описывается дифференциальным уравнением (1), решением которого служит функция (2), где d — отклонение температуры Т от заданной величины в начальный момент времени.
(1)  (2)
(2) 
Поскольку рассмотренная система описывается линейным дифференциальным уравнением 1-го порядка, она носит название линейной системы 1-го порядка. Более сложным поведением обладают линейные системы 2-го и более высоких порядков и особенно нелинейные системы.
|
|
|
