 |


Исследование линейной непрерывной системы автоматического управления
|
|
|
|
По курсу: Теория автоматического управления
Тема: Анализ с истем автоматического управления
Выполнил:Проверил:
Студент гр. 722401Кузнецов А. П.
Царик А.С.
Минск 2010
Содержание
1. Исследование линейной непрерывной системы автоматического управления
2. Исследование линейной импульсной системы автоматического управления
3. Исследование нелинейной непрерывной системы автоматического управления
Литература
Исследование линейной непрерывной системы автоматического управления
Задание:
1) Найти передаточную функцию разомкнутой системы W (s) и передаточную функцию замкнутой системы Ф(s),  ;
;
2) Построить область устойчивости системы в плоскости общего коэффициента передачи К = К1К2К3 и постоянной времени Т2 при заданных значения Т1 и Т3. Найти граничное значение  при заданном значении Т2, при котором система выходит на границу устойчивости.
при заданном значении Т2, при котором система выходит на границу устойчивости.
3) Построить графики логарифмических амплитудной и фазовой частотных характеристик L (w) и φ (w) при значении коэффициента передачи K =0,7 K ’.
4) Оценить запасы устойчивости по модулю ∆ L и фазе ∆ φ, величину ошибки по скорости еск при v (t) = v 1 t и f = 0, время переходного процесса tp и перерегулирование σ в исходной системе при K =0,7 K ’.
5) Если исходная система не удовлетворяет заданным в таблице 1 показателям качества tp, σ, еск (хотя бы одному из них) или имеет малые запасы устойчивости, то провести коррекцию системы (последовательного или параллельного типа) и найти передаточную функцию корректирующего устройства.
6) Вычислить в скорректированной системе переходный процесс на выходе y (t) при подаче на вход единичной ступенчатой функции v (t)=1(t)(f = 0). Найти tp, σ по переходному процессу и сравнить их с требуемым по заданию.
|
|
|
Исходные данные:
Структура исследуемой замкнутой линейной непрерывной САУ представлена на рис. 1.1, где v (t)- управляющее воздействие, (f)- возмущающее воздействие, е(t)- сигнал ошибки, y (t)- выходной сигнал. Значения параметров Т1 Т2, Т3 заданы в табл. 1. Размерность Т1 Т2, Т3 в секундах, общий коэффициент передачи К = К1К2К3 имеет размерность 1/с, в табл. 1 заданы также желаемые показатели качества системы: максимальная ошибка по скорости еск при скачке по скорости v (t) = v 1 t и f = 0, время переходного процесса t п.п в секундах, и перерегулирование у в процентах.
Таблица 1. Структура исследуемой замкнутой линейной непрерывной САУ
| Номер варианта | v 1 | еск | t п.п | σ | Т1× 
| Т2× 
| Т3 |
| 10 | 1,4 | 0,04 | 2,5 | 10 | 0,33 | 1,9 | 5 |

Рисунок 1.1
Выполнение:
1. Требуемые передаточные функции находят с использованием правил структурных преобразований. Коротко сформулируем основные правила:
— Передаточные функции последовательно соединенных звеньев перемножаются.
— Передаточные функции параллельно соединенных звеньев складываются.
Передаточная функция системы с обратной связью - это передаточная функция замкнутой системы, которая определяется по формуле:
 (по условию)
(по условию)
Передаточная функция разомкнутой системы W (s) = Y (s)/ U (s) при f = 0, e = u (т.е. разомкнута главная обратная связь) определится выражением:


где обозначим К = К1К2К3,
 0,03135
0,03135
 1,12127
1,12127
 5,223
5,223

Главная передаточная функция или передаточная функция замкнутой системы при f = 0:


Передаточная функция по ошибке при f = 0, которая позволяет выразить ошибку e(t) в системе при известном входном воздействии:

Передаточная функция по возмущению при и = 0 позволяет выразить влияние возмущения на выходной сигнал:

2.. Передаточная функция разомкнутой исходной системы имеет вид W (s) = K / sL (s), где L (s) = (T 1 s +1)(T 2 s +1)(T 3 s +1). Характеристическое уравнение замкнутой системы будет D (s) = K + L (s) s = b 0 s 4 + b } s 3 + b 2 s 2 + b 3 s + b 4 =0, где при заданных из таблицы исходных данных числовых значениях Т1 и Т3 коэффициенты bj будут зависеть от параметров К и Т2. Применение критерия Гурвица к характеристическому уравнению четвертого порядка дает следующие условия устойчивости:
|
|
|
b 3 (b 1 b 2 - b 0 b 3)- b 4 b 1 2 > 0, b, > 0, i = 0,...,4.
Приравнивая в написанных соотношениях правые части нулю, найдем зависимость К от Т2 и построим в плоскости К и Т2 границы устойчивости, ограничивающие некоторую область устойчивости. При заданном параметре Т2 находим граничное значение КГР коэффициента передачи К.

К = К1К2К3
b0=  =0,165
=0,165  =с0
=с0
 5,033
5,033  с0
с0

b3=1 b4=K
Выразим К через параметр Т2:

Зависимость К(Т2) приведена на рис. 1.2

Рис.1.2
K гр = KT 2=0.19 =4,633
3. Полагая К = 0.7КГР, записываем аналитическое выражение для φ(w) = argW (jw), L (w) = 20 lg | W (jw)| из W (s) при s = jw.
К=0.7Кгр= 3,243
Передаточную функцию разомкнутой системы можно записать в виде:

где


тогда:


где

Строим графики логарифмических характеристик разомкнутой системы, с помощью MATLAB (оператор bode или margin) Рис. 1.3 а.

Рис. 1.3а
Строим график АФЧХ с помощью MATLAB (оператор nyquist) рис. 1.3 б для разомкнутой системы.

Рис 1.3 б
Запасы устойчивости по модулю и фазе определяются по логарифмическим характеристикам (см. рис. 1.3 а): на частоте среза w с определяется запас по фазе —∆φ, а запас по амплитуде ∆ L - на частоте при которой φ(w) = -180. Таким образом, ∆ L ≈0. 1дБ, ∆φ≈ 0°, что является недостаточным.
4. Величина ошибки по скорости определяется как e ск = V 1 / K. Для ориентировочной оценки tпп и σ следует построить переходной процесс h (t) (оператор step в MATLAB) при v (t) = 1[ t ] и по нему определить tпп и σ.
Для получения уравнений состояний в нормальной форме используем дифференциальное уравнение замкнутой системы
D(s)y(t)=K v (t). Если D(s)=b0s4+b1s3+b2s2+b3s+b4=0,,то уравнение состояния имеет вид

Для описания динамических систем в пространстве состояний в Matlab применяются модели подкласса ss, которые основаны на линейных дифференциальных или разностных уравнениях.
|
|
|
Модель непрерывной системы в подклассе ss имеет вид:


где: х - вектор состояния; v - вектор входа; у - вектор выхода.
Для формирования моделей в подклассе ss предназначена функция ss
sys=ss(A,B,C,D)
В результате под именем sys получаем ss-объект с числовыми характеристиками в виде четверки матриц {А, В, С, D}, которые должны иметь согласованные размеры. Матрицу D в данном случае полагаем равной 0.
Для построения переходного процесса h (t) воспользуемся оператором step в MATLAB.
Реализация функций имеет вид:
sys=ss([0 1 0 0;0 0 1 0;0 0 0 1;-b4/b0 -b3/b0 -b2/b0 -b1/b0],[0 0 0 K/b0]', eye(4), zeros(4,1))
a =
x1 x2 x3 x4
x1 0 1 0 0
x2 0 0 1 0
x3 0 0 0 1
x4 -104.6 -32.26 -168.5 -36.16
b =
u1
x1 0
x2 0
x3 0
x4 104.6
c =
x1 x2 x3 x4
y1 1 0 0 0
y2 0 1 0 0
y3 0 0 1 0
y4 0 0 0 1
d =
u1
y1 0
y2 0
y3 0
y4 0
Continuous-time model.
>> step(sys)
В результате получим графики представленные на рис. 1.4. Нас будетинтересовать Out(l). Величина ошибки по скорости определяется как:
еск= V 1 / K = 1,4/3,243 = 0,432>е скзад = 0,04.
Для ориентировочной оценки tnn и о следует построить переходной процесс h { t) (оператор step в MATLAB) при v(t)=1(t) и по нему определить tпп и σ. Эти величины из графика Out(l) определяются следующим образом:

Время переходного процесса определяется с учетом следующих соотношений: εуст= v (t)/(l+K), где v(t)=l[t], а К=3,243 - общий коэффициент передачи разомкнутой системы. Тогда еуст= 1/(1+3,243)=0,236 и следовательно tпп из графика Out(l) t пп ≈ 50с > t пп зад = 2.5с.

Рис 1.4
Таким образом, исходная система не удовлетворяет заданным показателям качества, ее следует скорректировать.
5. Если исходная система не удовлетворяет заданным показателям качества, ее следует скорректировать. В случае применения частотных методов синтеза коррекции строится желаемая ЛАЧХ L ж (w). В низкочастотной части желаемой ЛАЧХ при сохранении порядка астатизма (наличие интегратора 1/s в системе) требуемый коэффициент усиления выбирается из соотношения Kz= v 1/ e ск=1,4 / 0.04 = 35. На частоте среза желательно иметь наклон ЛАЧХ -20 дБ/дек с протяженностью этого участка не менее одной декады. Далее среднечастотная часть ЛАЧХ сопрягается с низкочастотной отрезком прямой с наклоном -40(если необходимо -60) дБ/дек, а высокочастотная часть желаемой и исходной ЛАЧХ по возможности должны совпадать.
|
|
|
Учет требований качества переходного процесса: tпп и σ, запасов устойчивости учитываются при формировании среднечастотной области L ж (w). Здесь можно воспользоваться графиком (рис. 1.5).
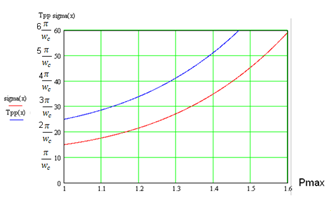
Рис 1.5
По графику рис. 1.5 для заданных значений у и tnn находим w п, и затем из соотношения wc = (0.6 - 0.9) w п, частоту среза wc.
В наше случае: (как показано на рис.1.5) для у =10%, t р =3π/ωп, откуда для t р значение ω п = 3π/1,5=6,8 1/с и ωc =5 1/с.
Сопряжение среднечастотного участка с низкочастотным и высокочастотным (рис. 1.6) должно быть таким, чтобы была проще коррекция и чтобы изломы, по возможности, были не более чем на 20 дБ/дек (протяженность участка около декады). Тогда, выберем L2≈10дБ на частоте ω2=(0.1-0.5)ωс=2.5<ωс=5 и L3 ≈ -10 дБ на частоте ω3=25 ≥ ωс=5. Введем обозначения:



Величину ω1 найдем из условия равенства значений Lж(ω1)=Lисх(ω1). Это
соотношение приводит к следующему выражению:

В последнем выражении обозначено:
ω ’=0.1 w 2
L ’(ω ’)=50 дБ
L ’(ω 2)=10 дБ
L (ω 3 p)= L (0.476)=21,18 дБ
L (ω 2)= L (1.2)=-35,743 дБ
Последние две величины находятся из выражения для Lисх(w).
Найденное по формуле значение ω 1=0.098
ЛАЧХ корректирующего устройства с характеристикой Lk(w) соответствует функция:

где:

Общая передаточная функция разомкнутой системы с корректирующим звеном последовательного типа имеет вид:

Далее воспользуемся функцией zpk(z, р, К), где z и р - векторы из нулей и полюсов, a Kd - обобщенный коэффициент передачи, sys - любое имя присваиваемое модели. Тогда запись в системе Matlab примет вид:
sys1=zpk([-1/t2k -1/t3k],[0 -1/t1 -1/t2 -1/t3 -1/t1k -1/t4k],kd)
Zero/pole/gain:
58.2 (s+2.5) (s+0.4762)
-------------------------------------------------
s (s+7.143) (s+4.167) (s+25) (s+0.4762) (s+0.097)

Рис. 1.6
6. Для нахождения переходных характеристик замкнутой системы с корректирующим звеном предварительно сформируем модель в пространстве состояний. Передаточная функция замкнутой системы имеет вид:


Для нахождения Ф(s) воспользуемся следующей последовательностью команд:
>>sys1=zpk([-1/t2k -1/t3k],[0 -1/t1 -1/t2 -1/t3 -1/t1k -1/t4k],kd)
Zam_ck=inv(l+sysl)*sysl - находится передаточная функция замкнутой системы. (Не оптимальная форма т.к. при такой последовательности команд не производится упрощение за счет сокращения одинаковых элементов числителя и знаменателя. В тоже время на результат дальнейшего расчета это не влияет).
>>Zam_ck=inv(1+sys1)*sys1
Переходная характеристика (рис. 1.7) находится с помощью функций: 0,05
|
|
|
Из рассмотрения рис. 1.7 видно, что параметры по заданию выполняются.

Рис 1.7
Для устранения неоптимальности записи в Zam_ck=inv(l+sysl)*sysl можно в диалоговом режиме произвести новую запись zpk(.) - сокращая одинаковые элементы числителя и знаменателя в Zam_ck.
|
|
|
12 |
