 |


Тиристорный преобразователь как динамическое звено
|
|
|
|
Рис. 3.8. ЛАЧХ и ЛФЧХ генератора
Форсирование переходных процессов. Для ГПТ с НВ (Р>100 кВт) постоянная времени значительно больше 1 с. Такая инерционность затягивает переходные процессы и значительно ограничивает его полосу пропускания. Для форсировки (убыстрения) переходных процессов применяют следующие два способа: уменьшение эквивалентного значения Тг, повышение или уменьшение изменения ЭДС генератора за счет управления напряжением возбуждения.

Рис. 3.9. Схемы включения ГПТ с НВ к сети (а) и
управляемому возбудителю (б)
При первом способе ( включено постоянно) необходимо подводить повышенное значение
включено постоянно) необходимо подводить повышенное значение  с тем, чтобы в номинальном режиме выполнялось условие:
с тем, чтобы в номинальном режиме выполнялось условие:  , т.е. к обмотке возбуждения подводилось номинальное значение
, т.е. к обмотке возбуждения подводилось номинальное значение  .
.
Второй способ заключается в том, что к обмотке возбуждения на время переходного процесса прикладывается повышенное напряжение, которое должно мгновенно, в конце процесса, уменьшено до требуемого установившегося значения. Это достигается введением с помощью контакта К2 резистора  (рис. 3.9, а) или снижением напряжения за счет отрицательной связи по напряжению генератора (рис.3.9, б штриховая линия). Такой способ форсировки называют форсировкой с отсечкой.
(рис. 3.9, а) или снижением напряжения за счет отрицательной связи по напряжению генератора (рис.3.9, б штриховая линия). Такой способ форсировки называют форсировкой с отсечкой.
Степень форсировки переходных процессов характеризуется коэффициентом форсировки:
 , (3.16)
, (3.16)
где  – начальное значение напряжения на обмотке возбуждения при
– начальное значение напряжения на обмотке возбуждения при  , В;
, В;
 .– установившееся значение напряжения на обмотке возбуждения, В.
.– установившееся значение напряжения на обмотке возбуждения, В.
Для первого случая
 ; (3.17)
; (3.17)
 ; (3.18)
; (3.18)
 , (3.19)
, (3.19)
где  – кратность разрядного сопротивления;
– кратность разрядного сопротивления;
 – сопротивление обмотки возбуждения.
– сопротивление обмотки возбуждения.
Для схемы возбуждения с шунтируемым дополнительным резистором
 ; (3.20)
; (3.20)
 . (3.21)
. (3.21)
Для схемы с управляемым возбудителем
|
|
|
 , (3.22)
, (3.22)
где Uн – напряжение насыщения управляемого возбудителя;
 – коэффициент усиления возбудителя;
– коэффициент усиления возбудителя;
 – коэффициент отрицательной связи по напряжению генератора
– коэффициент отрицательной связи по напряжению генератора
 . (3.23)
. (3.23)
С помощью  можно подсчитать напряжение цепи возбуждения и управляемого возбудителя, а также сопротивление .
можно подсчитать напряжение цепи возбуждения и управляемого возбудителя, а также сопротивление .
Графики переходных процессов для обоих случаев приведены на рис.3.10:
1 –  с постоянно введенным сопротивлением;
с постоянно введенным сопротивлением;
2 –  с форсировкой.
с форсировкой.
Как видно из графиков форсировка с отсечкой более эффективна, т.к. повышенное напряжение возбуждения остается неизменным.
Определим  , когда надо снять форсировку, т.е.
, когда надо снять форсировку, т.е.  :
:
 ;
;  ;
;
 ;
;  . (2.24)
. (2.24)

Рис.3.10. Графики переходных процессов
В электроприводе имеют место задачи, где требуется не форсирование процесса, а, напротив, дефорсирование в целях ограничения ускорения и поддержание его постоянным. В этих случаях инерционность генератора оказывается полезной. Однако при апериодическом характере переходного процесса в соответствии с передаточной функцией темп изменения ЭДС генератора, ограниченный инерционностью в начальный момент, не сохраняется постоянным, а непрерывно уменьшается. Обеспечить ограничение и постоянство темпа изменения ЭДС можно с помощью схемы с критическим самовозбуждением генератора (рис. 3.11).
Условием критического самовозбуждения является равенство сопротивления цепи самовозбуждения  передаточному коэффициенту по току данной обмотки, т.е.
передаточному коэффициенту по току данной обмотки, т.е.
 . (3.25)
. (3.25)
Полученное значение сопротивления называется критическим. Так как  , то можно записать
, то можно записать
 . (3.26)
. (3.26)
Это означает, что при критическом самовозбуждении коэффициент усиления генератора относительно обмотки самовозбуждения должен быть равен 1. Данное условие имеет также и графическую интерпретацию: равенство углового коэффициента прямой МДС самовозбуждения  величине
величине  означает параллельность характеристики управления генератора и прямой суммарной МДС в осях
означает параллельность характеристики управления генератора и прямой суммарной МДС в осях  , Fd.
, Fd.
|
|
|

Рис. 3.11. Схемы включения обмоток возбуждения генератора с
критическим самовозбуждением с двумя (а) и с одной (б) обмотками
Для варианта схемы возбуждения с двумя обмотками (ОВ1 и ОВ2) (рис. 3.11,а)
 ; (3.27)
; (3.27)
 , (3.28)
, (3.28)
где  - сопротивление параллельной обмотки, Ом;
- сопротивление параллельной обмотки, Ом;
- дополнительное сопротивление в цепи параллельной обмотки, Ом.
Для варианта с одной, но разделенной на две равные части обмоткой возбуждения (рис.3.11,б)
 ; (3.29)
; (3.29)
 , (3.30)
, (3.30)
где - сопротивление резистора, дополнительно включаемого последовательно с симметричной мостовой цепью самовозбуждения, Ом.
Цепь самовозбуждения выполняет функцию положительной обратной связи по ЭДС, ее МДС Fсв действует согласно с МДС независимой обмотки Fв1 и при линейной характеристике генератора
 . (3.31)
. (3.31)
Подставляя условие (3.26) в данное, получаем, что  . Таким образом, любое значение ЭДС обеспечивается самим генератором без постороннего источника возбуждения, т.е. статическая мощность источника независимого возбуждения равна нулю. Однако с учетом нелинейности характеристики управления генератора
. Таким образом, любое значение ЭДС обеспечивается самим генератором без постороннего источника возбуждения, т.е. статическая мощность источника независимого возбуждения равна нулю. Однако с учетом нелинейности характеристики управления генератора  и для обеспечения номинального возбуждения потребуется тем большее значение
и для обеспечения номинального возбуждения потребуется тем большее значение  , чем сильнее насыщен генератор в этом режиме.
, чем сильнее насыщен генератор в этом режиме.
Данный способ возбуждения позволяет существенно снизить мощность управления генератором:
Для схемы с двумя обмотками возбуждения (см. рис. 3.11,а)
 . (3.32)
. (3.32)
Для схемы с одной разделенной обмоткой возбуждения (см. рис. 3.11,б)
 , (3.33)
, (3.33)
где 
 – относительное значение МДС независимого возбуждения;
– относительное значение МДС независимого возбуждения;
 . – номинальные значения напряжения и тока возбуждения в схеме независимого возбуждения.
. – номинальные значения напряжения и тока возбуждения в схеме независимого возбуждения.
Динамические режимы генератора с критическим самовозбуждением в пределах прямолинейного участка его характеристики управления будут определяться общим уравнением возбуждения
 , (3.34)
, (3.34)
где  ,
,  для схемы с двумя обмотками возбуждения (рис. 3.11,а);
для схемы с двумя обмотками возбуждения (рис. 3.11,а);  ,
,  для схемы с одной разделенной обмоткой возбуждения (рис. 3.11,б).
для схемы с одной разделенной обмоткой возбуждения (рис. 3.11,б).
Генератор с критическим самовозбуждением представляет собой в динамике интегральное звено с передаточной функцией
 (3.35)
(3.35)
Темп интегрирования при неизменных параметрах kг и Tг определяется значением выходного напряжения управляемого возбудителя Uв1.
Для получения устойчивого установившегося режима работы генератора на прямолинейном участке характеристики управления на вход возбудителя вводится напряжение отрицательной обратной связи. При этом уравнение (3.34) дополнено уравнением для управляемого возбудителя, и совместное их решение даст выражение
|
|
|
 . (3.36)
. (3.36)
Данному уравнению соответствует структурная схема, приведенная на рис.3.12. Отрицательная обратная связь оказывается блокированной, когда управляемый возбудитель работает на участке насыщения и генератор, являясь интегратором, имеет максимально допустимый темп изменения ЭДС. При работе возбудителя на усилительном участке характеристики управления отрицательная связь переводит генератор в режим работы апериодического звена с передаточной функцией:
 , (3.37)
, (3.37)
где
 .
.


Рис. 3.12. Структурная схема генератора с критическим
самовозбуждением и отрицательной обратной связью
по напряжению
При высоком коэффициенте усиления возбудителя постоянная  мала, и генератор по свойствам приближается к безыинерционному звену для частот
мала, и генератор по свойствам приближается к безыинерционному звену для частот  .
.
3.2. Электромагнитный усилитель поперечного поля
Простейшим электромагнитным усилителем (ЭМУ) является генератор постоянного тока с независимым возбуждением, поскольку мощность возбуждения составляет несколько процентов от выходной мощности машины. Значительно большой коэффициент усиления по мощности (до 104) имеют ЭМУ поперечного поля за счет двух каскадов усиления (рис. 3.13).

Рис. 3.13. Принципиальная схема ЭМУ поперечного поля
ЭМУ представляет собой генератор, имеющий на якоре обмотку, типичную для машин постоянного тока. Шихтованную магнитную систему выполняют как с явно, так и с неявно выраженными полюсами. На коллекторе располагаются две пары щеток: аа и бб. Поперечные щетки замкнуты между собой.
Под действием потока Фу, создаваемого обмоткой управления LG, в цепи короткозамкнутых щеток возникает значительный ток. Результатом этого является магнитный поток Фа, неподвижный в пространстве. В витках обмотки якоря, пересекающих поток Фаa, наводится ЭДС Eэ, которая снимается щетками бб и подводится к нагрузке Rн. Ток выходной цепи ЭМУ Iэ создает поток реакции якоря по продольной оси Фаa, уменьшающий действие потока управления Фу. Для ослабления действия продольной составляющей реакции якоря Фа в усилителе имеется компенсационная обмотка LG1. В зависимости от положения ползунка потенциометра Rш магнитный поток компенсационной обмотки может быть меньше Фa (недокомпенсация), равен Фa (полная компенсация) и больше его (перекомпенсация).
|
|
|
На рис 3.14. изображена регулировочная характеристика (а) ЭМУ поперечного поля  и внешние характеристики (б)
и внешние характеристики (б)  при различных коэффициентах компенсации. Наклон внешних характеристик характеризуется величиной эквивалентного сопротивления
при различных коэффициентах компенсации. Наклон внешних характеристик характеризуется величиной эквивалентного сопротивления  , зависящего от активного сопротивления якорной цепи и степени компенсации. Величину определяют из опытных данных (по аналогии с ГПТ):
, зависящего от активного сопротивления якорной цепи и степени компенсации. Величину определяют из опытных данных (по аналогии с ГПТ):
 .
.

Рис 3.14. Регулировочная (а) и внешняя (б) характеристики ЭМУ
В соответствии эквивалентное сопротивление ЭМУ может быть положительным (при недокомпенсации), отрицательным (при перекомпенсации). В системах регулирования ЭМУ, как правило, недокомпенсирован; величену  можно определить по формуле
можно определить по формуле
 , (3.38)
, (3.38)
где  - справочное значение сопротивления якорной цепи.
- справочное значение сопротивления якорной цепи.
Получим передаточную функцию ненагруженного ЭМУ поперечного поля. Входной координатой первого каскада усиления ЭМУ является напряжение обмотки управления  , а выходной – ЭДС короткозамкнутой обмотки якоря
, а выходной – ЭДС короткозамкнутой обмотки якоря  . По аналогии с ГПТ передаточная функция первого каскада усиления
. По аналогии с ГПТ передаточная функция первого каскада усиления
 , (3.39)
, (3.39)
где  - передаточный коэффициент первого каскада усилении
- передаточный коэффициент первого каскада усилении 
 - электромагнитная постоянная времени обмотки управления
- электромагнитная постоянная времени обмотки управления 
 - индуктивность и сопротивление обмотки управления.
- индуктивность и сопротивление обмотки управления.
Входной координатой второго каскада усиления ЭМУ является ЭДС короткозамкнутой обмотки. А выходной – ЭДС обмотки якоря  , снимаемой щетками бб. Передаточная функция второго каскада
, снимаемой щетками бб. Передаточная функция второго каскада
 , (3.40)
, (3.40)
где  передаточный коэффициент второго каскада усиления;
передаточный коэффициент второго каскада усиления; 
 - электромагнитная постоянная короткозамкнутой цепи (значения ее приводится в справочниках):
- электромагнитная постоянная короткозамкнутой цепи (значения ее приводится в справочниках): 
 индуктивность и активное сопротивление короткозамкнутой цепи.
индуктивность и активное сопротивление короткозамкнутой цепи.
На основании  передаточная функция ЭМУ поперечного поля
передаточная функция ЭМУ поперечного поля
 , (3.41)
, (3.41)
где  передаточный коэффициент ЭМУ по напряжению,
передаточный коэффициент ЭМУ по напряжению, 
ЭМУ поперечного поля имеет несколько обмоток управления (до 4), что обеспечивает простоту суммирования нескольких сигналов управления. Если в схеме использовано n обмоток управления, то постоянная времени первого каскада определяется как сумма постоянных времени отдельных обмоток:
 , (3.42)
, (3.42)
где  - постоянная времени i-й обмотки управления.
- постоянная времени i-й обмотки управления.
|
|
|
В справочной литературе приводятся значения постоянных времени обмоток управления, определяемые только индуктивностью и сопротивлением обмоток:
 . (3.43)
. (3.43)
Действительное значение электромагнитной постоянной времени обмотки управления зависит от величины добавочных индуктивностей и сопротивлений, обусловленных схемой включения:
 . (3.44)
. (3.44)
Заметим что благодаря двухкаскадному усилению сигналов ЭМУ поперечного поля имеют лучшее быстродействие, чем ГПТ независимого возбуждения.
3.3. Магнитные усилители
Принцип действия магнитных усилителей (МУ) основан на нелинейности характеристики намагничивания  ферромагнитных материалов (рис 3.15,а).
ферромагнитных материалов (рис 3.15,а).
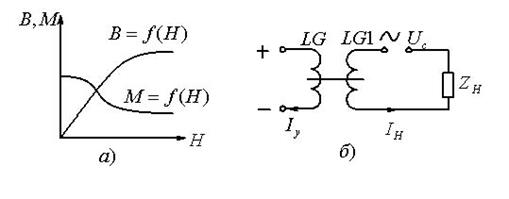
Рис. 3.15. Характеристика намагничивания (а)
схема дроссельного магнитного усилителя (б)
Простейший нереверсивный МУ состоит из дросселя насыщения, включенного в цепь переменного тока последовательно с нагрузкой  (рис 3.15, б). При изменении тока управления
(рис 3.15, б). При изменении тока управления  в обмотке управления LG изменяется реактивное сопротивление рабочей обмотки LG1. Это приводит к изменению тока нагрузки
в обмотке управления LG изменяется реактивное сопротивление рабочей обмотки LG1. Это приводит к изменению тока нагрузки  в выходной цепи. Напряжение на нагрузке
в выходной цепи. Напряжение на нагрузке
 , (3.45)
, (3.45)
где  - активные сопротивления и индуктивности соответственно нагрузки и дросселя.
- активные сопротивления и индуктивности соответственно нагрузки и дросселя.
Индуктивность дросселя
 , (3.46)
, (3.46)
где S, l - сечение и длина средней линии сердечника дросселя; m - магнитная проницаемость.
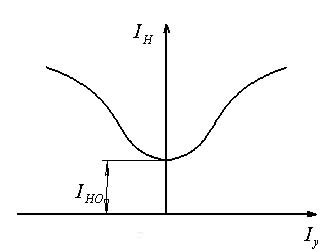
Рис. 3.16. Регулировочная характеристика МУ
На рис. 3.16 изображена регулировочная характеристика простейшего МУ  . Характеристика симметрична относительно оси ординат. При токе управления
. Характеристика симметрична относительно оси ординат. При токе управления  ток нагрузки
ток нагрузки  минимален, но не равен нулю, так как при этом индуктивность дросселя имеет конечное значение.
минимален, но не равен нулю, так как при этом индуктивность дросселя имеет конечное значение.
Сердечники мощных МУ изготавливают из трансформаторной стали; для усилителей малой мощности обычно используют железоникелевые сплавы типа пермаллоя и другие с высокой магнитной проницаемостью.
Приведенная на (рис 3.15, б) схема МУ имеет существенный недостаток, ограничивающий его применение: за счет переменного тока рабочей обмотки в обмотке управления наводится значительная ЭДС, искажающая управляющий сигнал. Для устранения этого явления применяют двухдроссельные МУ, включенные по управляющей обмотке навстречу друг другу (рис. 3.17, а)

Рис. 3.17. Двухдроссельные МУ с встречным включением
управляющей обмотки (а); со специальной обмоткой смещения (б)
В соответствии с (рис 3.16) простейшие магнитные усилители не реагируют на изменение полярности управляющего напряжения. Этот недостаток устраняют применением специальной обмотки смещения  , питаемой постоянным током (рис 3.17, б). Обмотка смещения осуществляет сдвиг регулировочной характеристики МУ по отношению к управляющему сигналу (рис 3.18).
, питаемой постоянным током (рис 3.17, б). Обмотка смещения осуществляет сдвиг регулировочной характеристики МУ по отношению к управляющему сигналу (рис 3.18).

Рис 3.18. Регулировочная характеристика МУ
с обмоткой смещения
Простейшие МУ усиливают управляющий сигнал по мощности в несколько десятков раз, что не всегда достаточно при использовании их в системах регулирования. Для увеличения коэффициента усиления и расширения функциональных возможностей в магнитных усилителях применяют внутренние и внешние обратные связи.
Вариант схемы МУ с внешней обратной связью по току приведен на рис. 3.19,а.
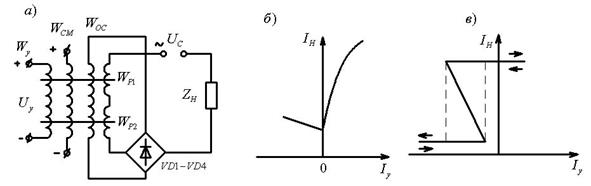
Рис. 3.19. МУ с обратной связью (а) и регулировочной
характеристиками (б,в)
Ток нагрузки выпрямителя VD1-VD4 протекает по обмотке обратной связи Wос. Регулировочные характеристики магнитного усилителя при различных значениях коэффициента обратной связи приведены на рис.3.19 б, в. Направление тока в обмотке обратной связи определяется только схемой выпрямителя и не зависит от полярности управляющего напряжения. Поэтому для одной ветви регулировочной характеристики обратная связь оказывается положительной (направления магнитных потоков обмоток управления и обратной связи совпадают), а для другой – отрицательной. При коэффициенте обратной связи  магнитный усилитель работает в релейном режиме (рис 3.19, в). Широко применяются МУ с положительной внутренней обратной связью по току. Схема одного из вариантов подобных МУ с выходом на постоянном токе приведена на рис. 3.20. Обратная связь осуществляется включением диодов VD1-VD4 в цепь рабочих обмоток так, чтобы по ним протекал пульсирующий ток. Постоянная составляющая пульсирующего тока дополнительно подмагничивает сердечники МУ, что эквивалентно действию обратной связи по току.
магнитный усилитель работает в релейном режиме (рис 3.19, в). Широко применяются МУ с положительной внутренней обратной связью по току. Схема одного из вариантов подобных МУ с выходом на постоянном токе приведена на рис. 3.20. Обратная связь осуществляется включением диодов VD1-VD4 в цепь рабочих обмоток так, чтобы по ним протекал пульсирующий ток. Постоянная составляющая пульсирующего тока дополнительно подмагничивает сердечники МУ, что эквивалентно действию обратной связи по току.

Рис. 3.20. МУ с выходом на постоянном токе.
Коэффициент внутренней обратной связи равен отношению напряженности поля обратной связи к среднему значению напряженности, создаваемой переменным током, т.е.
 , (3.47)
, (3.47)
где  и
и  .
.
Фактически  немного меньше единицы в связи с неидеальностью диодов (наличие обратного тока).
немного меньше единицы в связи с неидеальностью диодов (наличие обратного тока).
Достоинство внутренней обратной связи – отсутствие специальной обмотки обратной связи. Недостаток – сложность изменения .
При необходимости изменения полярности выходного напряжения (выход на постоянном токе) или его фазы (выход на переменном токе) применяют реверсивные магнитные усилители. На рис. 3.21,а изображена схема реверсивного МУ с выходом на постоянном токе. Он состоит из двух нереверсивных магнитных усилителей, включенных по дифференциальной схеме. Напряжение нагрузки равно разности напряжений на балластных сопротивлениях  и
и  . Регулировочные характеристики дифференциального МУ приведены на рис 3.21, б.
. Регулировочные характеристики дифференциального МУ приведены на рис 3.21, б.
Магнитный усилитель как элемент систем управления является дискретным звеном со сложной формой выходных импульсов. Однако с учетом фильтрующего действия других элементов, входящих в систему, его часто можно представить непрерывным звеном.
Как показывает практика, инерционность МУ в основном определяется параметрами обмоток управления. Для управляющей цепи справедливо уравнение
 , (3.48)
, (3.48)
где  - напряжение, ток, сопротивление и индуктивность обмотки управления.
- напряжение, ток, сопротивление и индуктивность обмотки управления.

Рис 3.21. Схема реверсивного МУ (а) и его регулировочные характеристики (б)
Заметим, что индуктивность обмотки управления зависит от степени насыщения сердечника, т.е. является величиной переменной. Для упрощения математических соотношений предположим, что при относительно небольших изменениях напряжения управления  . Если пренебречь отставание M тока нагрузки от тока управления в переходных режимах для ненасыщенных сердечников, то
. Если пренебречь отставание M тока нагрузки от тока управления в переходных режимах для ненасыщенных сердечников, то
 (3.49)
(3.49)
или  , (3.50)
, (3.50)
где Iн ср - среднее значение тока нагрузки;
KI - коэффициент усиления МУ по току;
 при последовательном включении рабочих обмоток.
при последовательном включении рабочих обмоток.
Среднее значение напряжения на сопротивлении нагрузки
 . (3.51)
. (3.51)
В результате получим:
 (3.52)
(3.52)
или  , (3.53)
, (3.53)
где  - электромагнитная постоянная времени обмотки управления,
- электромагнитная постоянная времени обмотки управления,  ;
;  - коэффициент усиления магнитного усилителя по напряжению,
- коэффициент усиления магнитного усилителя по напряжению,
 . (3.54)
. (3.54)
Тогда передаточная функция магнитного усилителя
 , (3.55)
, (3.55)
т.е. при сделанных допущениях МУ эквивалентен инерционному звену.
Постоянную времени МУ с несколькими включеными обмотками управления определяют как сумму постоянных времени отдельных обмоток аналогично соответствующим расчетам ЭМУ.
В системах регулирования магнитные усилители выполняют следующие функции: предварительное усиление сигналов; управление двигателями постоянного и переменного тока (силовые преобразователи); суммирование нескольких сигналов; преобразование постоянного напряжения (тока) в модулированные колебания переменного тока и некоторые другие.
Достоинство МУ: надежность в работе; повышенная виброустойчивость; большая чувствительность; возможность суммирования нескольких сигналов; питание от сети переменного тока; готовность к работе сразу после включения.
Недостатки магнитных усилителей: значительная инерционность; малое входное сопротивление; низкий КПД реверсивных схем; невозможность создания режима рекуперации.
Увеличение быстродействия МУ достигается за счет повышения частоты питающего напряжения, каскадного включения нескольких магнитных усилителей, использования специальных схем быстродействующих МУ.
3.4. Вентильные преобразователи напряжения
постоянного тока (ВП)
На сегодня широкое применение ВП в системах АЭП обусловлено выпуском надежных малогабаритных тиристоров и транзисторов. На их основе для электропривода постоянного тока разработаны два типа преобразователей: тиристорные преобразователи (ТП) напряжения переменного тока в постоянный и широтно-импульсные преобразователи (ШИП) неизменного напряжения постоянного тока в регулируемое напряжение постоянного тока.
3.4.1. Тиристорные преобразователи (ТП)
Достоинства:
- высокий КПД из-за незначительного падения напряжения на тиристоре (<1В);
- малая инерционность 0,01…0,02 с, обусловленная фильтрами в цепях управления и неуправляемостью тиристоров в течении интервала проводимости;
- высокая надежность при использовании быстродействующей защиты и модульно-блочного исполнения ТП.
Недостатки:
- низкий коэффициент мощности при глубоком регулировании напряжения;
- искажения питающего напряжения, вносимые работой ТП;
- повышенный уровень излучаемых радиопомех.
Функциональная схема ТП имеет вид (рис. 3.22)

Рис. 3.22. Функциональная схема ТП.
- входная координата – напряжение управления  ;
;
- выходная координата – выпрямленная ЭДС Ed (Ed – средняя величина на интервалах проводимости в установившихся режимах и еd – в переходных процессах).
Входной блок Б1 преобразует величину  в угол открывания тиристоров a, а выходной блок Б2 преобразует величину a в Еd. Технически Б1 представляет собой систему импульсно-фазового управления (СИФУ), а блок Б2 – вентильную группу ВГ (схема включения комплекта тиристоров). Возмущающее воздействие – ток нагрузки Id, который через функциональный блок нагрузки БН поступает на вход Б2.
в угол открывания тиристоров a, а выходной блок Б2 преобразует величину a в Еd. Технически Б1 представляет собой систему импульсно-фазового управления (СИФУ), а блок Б2 – вентильную группу ВГ (схема включения комплекта тиристоров). Возмущающее воздействие – ток нагрузки Id, который через функциональный блок нагрузки БН поступает на вход Б2.
Отметим: влияние Id на Ed проявляется только в режиме прерывистых токов.
В режиме непрерывных токов ЭДС является функцией только угла открывания.
 . (3.56)
. (3.56)
Для m-фазной нулевой схемы ТП:
 , (3.57)
, (3.57)
где Е2m- амплитудное значение фазной ЭДС на вторичной обмотке трансформатора;
Е2- действующее значение фазной ЭДС вторичной обмотки трансформатора;
m- число фаз.
Действующее значение фазного тока I2 на вторичной обмотке трансформатора определится через выпрямленный ток Id, если он имеет прямоугольную форму:
 . (3.58)
. (3.58)
Внутреннее сопротивление ТП (приведенное к цепи нагрузки):
 , (3.59)
, (3.59)
где  – эквивалентное сопротивление ТП, вызываемое перекрытием вентилей, Ом;
– эквивалентное сопротивление ТП, вызываемое перекрытием вентилей, Ом;
 - индуктивное сопротивление рассеяния фазы трансформатора, приведенное ко вторичной цепи, Ом;
- индуктивное сопротивление рассеяния фазы трансформатора, приведенное ко вторичной цепи, Ом;
 – расчетное сопротивление вентилей, Ом;
– расчетное сопротивление вентилей, Ом;
 - результирующее активное сопротивление источника питания, Ом.
- результирующее активное сопротивление источника питания, Ом.
Наибольшее распространение получили нулевые и мостовые схемы включения вентильных групп (рис.3.23,а,б,в,г).
1 схема. Самая простая, но самый большой уровень пульсаций, частота  Гц. Ток Idдополнительно подмагничивает трансформатор, что требует увеличение габаритов трансформатора. Для двигателей до 1-10 кВт.
Гц. Ток Idдополнительно подмагничивает трансформатор, что требует увеличение габаритов трансформатора. Для двигателей до 1-10 кВт.
2 схема. Высокая частота пульсаций  Гц, не требуется уравнительный реактор, но необходима самая большая мощность трансформатора, схема соединения первичной обмотки трансформатора ∆, если Υ, то сильное подмагничивание всех частей трансформатора, повышенное значение Rdп. Для двигателей 1-5 кВт.
Гц, не требуется уравнительный реактор, но необходима самая большая мощность трансформатора, схема соединения первичной обмотки трансформатора ∆, если Υ, то сильное подмагничивание всех частей трансформатора, повышенное значение Rdп. Для двигателей 1-5 кВт.
3 схема. Вентильные группы работают параллельно, поэтому необходим реактор L, чтобы исключить коммутацию вентилей с одной группы на другую, т.е. работа обеих групп независима. Нет подмагничивания трансформатора, т.к. обмотки включены встречно и МДС на одном стержне противоположны. Частота пульсаций Гц. Меньшее значение SТ и самое малое Rdп. Для больших мощностей и токов.
4 схема. Выпрямленная ЭДС при одном и том же вторичном напряжении трансформатора в 2 раза больше; пульсации выпрямленной ЭДС в 2 раза больше по частоте и меньше по амплитуде; вентильные группы могут подключаться к сети без трансформатора; для электропривода в десятки и сотни кВт.

а) трехфазная:


б) шестифазная:


в) 3-х фазная с уравнительным реактором


г) 3-х фазная мостовая:

Рис. 3.23. Схемы включения вентилей
 - действующее значение линейной ЭДС вторичной цепи трансформатора.
- действующее значение линейной ЭДС вторичной цепи трансформатора.
Трехфазная мостовая схема (рис. 3.22,г) представляет собой сдвоенную нулевую схему работающую последовательно в оба полупериода переменного тока. Схемы на рис. 3.23 – нереверсивные. Реверсивные схемы ТП состоящие из двух комплектов вентилей имеют название – встречно-параллельные, из двух комплектов нереверсивных ТП – перекрестные.
Для удобства анализа работы СИФУ ТП обычно нумеруются тиристоры в вентильных группах в соответствии с очередностью их открывания, начиная отсчет с фазы а.
Диаграммы очередности открывания тиристоров для приведенных ниже схем имеют вид на рис. 3.24.
Основу СИФУ представляет блок управления БУ, управляющий одним тиристором (рис. 3.25). ГОН – генератор опорного напряжения, который синхронизирован с напряжением питания тиристора; ФСУ – фазосмещающее устройство, которое регулирует фазу управляющего импульса; ГИ – генератор импульсов, вырабатывает необходимый для открывания тиристоров импульс.
Широкое применение в современных СИФУ находит так называемый вертикальный принцип управления. В таких СИФУ разностный сигнал  при изменении управляющего напряжения изменяет момент перехода через нуль относительно вторичной ЭДС е2Т, соответственно регулируется фаза открывающего импульса (рис.3.26).
при изменении управляющего напряжения изменяет момент перехода через нуль относительно вторичной ЭДС е2Т, соответственно регулируется фаза открывающего импульса (рис.3.26).

Рис. 3.24. Диаграмма очередности открывания тиристоров

Рис. 3.25. Функциональная схема блока управления СИФУ

Рис.3.26. Диаграмма регулирования фазы открывающего
импульса по вертикальному принципу
Синхронизация напряжений  и е2Т выполняется таким образом, чтобы при
и е2Т выполняется таким образом, чтобы при  угол открывания
угол открывания  , что соответствует
, что соответствует  для режима непрерывных токов. Для выполнения этого условия фазовый сдвиг между опорным напряжением и вторичной ЭДС для любого тиристора с номером iдолжен составлять:
для режима непрерывных токов. Для выполнения этого условия фазовый сдвиг между опорным напряжением и вторичной ЭДС для любого тиристора с номером iдолжен составлять:
 . (3.60)
. (3.60)
Управляющие свойства ТП определяются их характеристиками управления
 . (3.61)
. (3.61)
В соответствии с общей функциональной схемой (см. рис. 3.25) внутренняя координата ТП – угол открывания α – выделяет в составе ТП две части: СИФУ и ВГ, математическим описанием которых будут характеристики управления СИФУ  и вентильной группы
и вентильной группы  . Очевидно, что результирующая характеристика управления ТП определиться как сложная функция, т.е.
. Очевидно, что результирующая характеристика управления ТП определиться как сложная функция, т.е.  . Поскольку для всех ТП характеристики управления вентильных групп одинаковы, то вид результирующей характеристики будет зависеть от характеристики управления СИФУ, в свою очередь, определяемой видом опорного напряжения. Так как открывающий импульс выдается в моменты равенства опорного напряжения на его спадающем участке и напряжения управления, то зависимость
. Поскольку для всех ТП характеристики управления вентильных групп одинаковы, то вид результирующей характеристики будет зависеть от характеристики управления СИФУ, в свою очередь, определяемой видом опорного напряжения. Так как открывающий импульс выдается в моменты равенства опорного напряжения на его спадающем участке и напряжения управления, то зависимость  определяется формой опорного напряжения и его фазовым сдвигом по отношению к напряжению силовой цепи тиристора. Если при
определяется формой опорного напряжения и его фазовым сдвигом по отношению к напряжению силовой цепи тиристора. Если при  , , то при косинусоидальной форме опорного напряжения
, , то при косинусоидальной форме опорного напряжения  (рис. 3.27,а)
(рис. 3.27,а)

Рис. 3.27. Косинусоидальное (а) и пилообразное (б) опорные напряжения СИФУ.
Тогда характеристика СИФУ определиться выражением:
 . (3.62)
. (3.62)
Эта подстановка в выражение для Ed определит характеристику управления ТП при косинусоидальном опорном напряжении
 . (3.63)
. (3.63)
Характеристика оказывается прямолинейной с коэффициентом усиления
 (3.64)
(3.64)
в диапазоне изменения от
