 |


Подстановка (4.26) в (4.27) даст
|
|
|
|
 . (4.28)
. (4.28)
Соответствующая алгоритмам (4.27) и (4.28) диаграмма изменения выходной ЭДС приведена на рис. 4.16. Если
 и
и  ,
,
то среднее значение выпрямленной выходной ЭДС
 .
.
Так как  , а среднее значение выходного напряжения
, а среднее значение выходного напряжения  , то
, то
 , (4.29)
, (4.29)
где  – передаточный коэффициент от входного напряжения к ЭДС контура.
– передаточный коэффициент от входного напряжения к ЭДС контура.
Для  или
или  и
и  имеет место амплитудный режим ФД, для которого характеристика управления прямолинейна
имеет место амплитудный режим ФД, для которого характеристика управления прямолинейна
 , (4.30)
, (4.30)
где  – коэффициент усиления ФД в амплитудном режиме. Для
– коэффициент усиления ФД в амплитудном режиме. Для  и
и  имеет место фазовый режим ФД, для которого
имеет место фазовый режим ФД, для которого
 , (4.31)
, (4.31)
где  .
.
При малых 
 , (4.32)
, (4.32)
где  – передаточный коэффициент ФД в фазовом режиме.
– передаточный коэффициент ФД в фазовом режиме.
Рассмотрим цифро-аналоговый преобразователь (ЦАП), согласующий цифровую часть системы управления с аналоговой. Входная координата ЦАП – двоичное многоразрядное число  , а выходная координата – напряжение
, а выходная координата – напряжение  , формируемое на основе опорного напряжения
, формируемое на основе опорного напряжения  (рис. 4.17).
(рис. 4.17).
Схемы ЦАП строятся на основе резисторной матрицы, с помощью которой происходит суммирование токов или напряжений так, что выходное напряжение пропорционально входному числу. В составе ЦАП можно выделить три основные части: резисторная матрица, электронные ключи, управляемые входным числом, и суммирующий усилитель, формирующий выходное напряжение. На рис. 4.18 приведена простая схема нереверсивного ЦАП. Каждому разряду входного двоичного числа  соответствует сопротивление
соответствует сопротивление
 , (4.33)
, (4.33)
где  – сопротивление младшего разряда, Ом.
– сопротивление младшего разряда, Ом.
Резистор  подключается к источнику питания с опорным напряжением через электронный ключ
подключается к источнику питания с опорным напряжением через электронный ключ  , который замкнут при
, который замкнут при  и разомкнут при
и разомкнут при  . Очевидно, что в зависимости от значения
. Очевидно, что в зависимости от значения  , сопротивление входной цепи для i -го разряда определится выражением
, сопротивление входной цепи для i -го разряда определится выражением
 . (4.34)
. (4.34)
Рис. 4.17. Основные координаты ЦАП
|
|
|
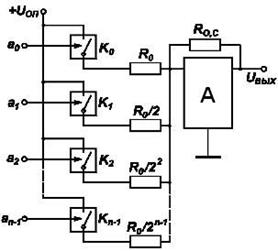
Рис. 4.18. Схема неверсивного ЦАП
Тогда для , т. е. цепь разорвана, а для цепь включена и имеет сопротивление  . Выходное напряжение операционного усилителя A, суммирующего входные токи, в соответствии с (4.8) и с учетом (4.34) находится с помощью выражения
. Выходное напряжение операционного усилителя A, суммирующего входные токи, в соответствии с (4.8) и с учетом (4.34) находится с помощью выражения
 . (4.35)
. (4.35)
Таким образом, характеристика управления ЦАП  имеет ступенчатую форму с дискретностью по напряжению, соответствующей младшему разряду,
имеет ступенчатую форму с дискретностью по напряжению, соответствующей младшему разряду,
 . ( 4.36)
. ( 4.36)
Величина  является одновременно и усредненным передаточным коэффициентом ЦАП.
является одновременно и усредненным передаточным коэффициентом ЦАП.
Рассмотренная схема ЦАП предусматривает разные номиналы входных разрядных сопротивлений. Чем старше разряд, тем меньше сопротивление и больше ток, тем выше требования к классу точности изготовления резистора по значению сопротивления. Разброс тока для i -го разряда должен быть меньше значения тока самого младшего разряда, т. е.
 , (4.37)
, (4.37)
откуда требуемая относительная точность составит
 . (4.38)
. (4.38)
Так, согласно (4.38) при числе разрядов n=10 требуемая точность изготовления резистора старшего разряда составит около 0,1 %, что намного превышает практически реализуемую точность в стандартных элементах. При большом числе разрядов требуется большое разнообразие в резисторах, как по значениям сопротивлений, так и по классу точности. Эти недостатки ограничивают применение данной схемы преобразователями с небольшой разрядностью. Другим недостатком схемы является факт подачи на ключи полного напряжения , что усложняет схемы электронных ключей и снижает частоту их переключения из-за паразитных емкостей. Отмеченные недостатки в значительной мере устраняются в схеме, в которой используются однотипные резисторы и электронные ключи, постоянно обтекаемые токами.
На рис. 4.19 изображена схема с резисторной матрицей с двумя номиналами сопротивлений R и 2R для любого числа разрядов. Все резисторы обтекаются неизменными токами независимо от положения электронных ключей  . Управляемые входным числом
. Управляемые входным числом  ключи имеют два положения: замкнуты на шину
ключи имеют два положения: замкнуты на шину  ,если соответствующие ai=0, и замкнуты на шину
,если соответствующие ai=0, и замкнуты на шину  , если аi=1. На резисторах R и 2R в точках 3, 2, 1,0 происходит последовательно деление пополам тока и напряжения, при этом ток i -го разряда, протекающий в шину , определяется формулой
, если аi=1. На резисторах R и 2R в точках 3, 2, 1,0 происходит последовательно деление пополам тока и напряжения, при этом ток i -го разряда, протекающий в шину , определяется формулой
|
|
|

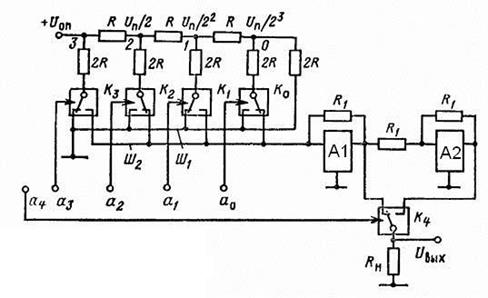
Рис. 4.19 Схема реверсивного ЦАП с резисторной
матрицей постоянного сопротивления
 (4.39)
(4.39)
Выходное напряжение на выходе первого усилителя А1 выражается через суммарный входной ток следующим образом:
 (4.40)
(4.40)
Дискретность и усредненный передаточный коэффициент ЦАП в данной схеме составляют:
 . (4.41)
. (4.41)
Очевидно, что напряжение на выходе второго усилителя будет отличаться от (4.40) только знаком. Полярность выходного напряжения ЦАП, выделяющегося на сопротивлении нагрузки  , определяется положением электронного ключа
, определяется положением электронного ключа  , который управляется самым старшим, знаковым разрядом входного числа (рис. 4.19). При
, который управляется самым старшим, знаковым разрядом входного числа (рис. 4.19). При  ключ замкнут на выход A2 и
ключ замкнут на выход A2 и  , при
, при  ключ перекинут на A1 и
ключ перекинут на A1 и  .
.
Аналого-цифровой преобразователь (АЦП) решает обратную задачу – преобразует входное непрерывное по форме напряжение в пропорциональное ему число. Каждому выходному числу  соответствует диапазон изменения входного напряжения:
соответствует диапазон изменения входного напряжения:
 , (4.42)
, (4.42)
где
 (4.43)
(4.43)
– эталонное значение входного напряжения, соответствующее выходному числу  ; – дискретность по напряжению, соответствующая единице младшего разряда выходного числа, В.
; – дискретность по напряжению, соответствующая единице младшего разряда выходного числа, В.
При n -разрядном АЦП общее число отличных от нуля эталонных уровней входного напряжения, отличающихся друг от друга на  , равно максимальному выходному числу
, равно максимальному выходному числу  . Так как каждый уровень
. Так как каждый уровень  согласно (4.42) несет в себе информацию о числе, то в работе АЦП можно выделить основные операции: сравнение входного и эталонного напряжений, определение номера уровня, формирование выходного числа в заданном коде. Усредненный передаточный коэффициент АЦП определяется как обратная величина соответствующего коэффициента ЦАП:
согласно (4.42) несет в себе информацию о числе, то в работе АЦП можно выделить основные операции: сравнение входного и эталонного напряжений, определение номера уровня, формирование выходного числа в заданном коде. Усредненный передаточный коэффициент АЦП определяется как обратная величина соответствующего коэффициента ЦАП:
 . (4.44)
. (4.44)
Схемы реализации АЦП можно разделить на два основных типа: параллельного действия и последовательного действия. На рис. 4.20 представлена схема АЦП параллельного действия. С помощью резисторного делителя выделяются уровни эталонного напряжения в точках 1,2,..., N. Сравнение  и
и  выполняется на компараторах
выполняется на компараторах  , в качестве которых используются операционные усилители с однополярным выходом. При
, в качестве которых используются операционные усилители с однополярным выходом. При  на выходах компараторов имеет место нулевой сигнал, а при
на выходах компараторов имеет место нулевой сигнал, а при  компараторы дают единичный сигнал на своих выходах, который запоминается D – триггерами. Число единиц на выходах триггеров преобразуется с помощью шифратора CD в код n-разрядного двоичного числа
компараторы дают единичный сигнал на своих выходах, который запоминается D – триггерами. Число единиц на выходах триггеров преобразуется с помощью шифратора CD в код n-разрядного двоичного числа  , равного i. Достоинство данной схемы АЦП – высокое быстродействие (два такта), недостаток – большое число компараторов и триггеров
, равного i. Достоинство данной схемы АЦП – высокое быстродействие (два такта), недостаток – большое число компараторов и триггеров  . Так, для восьмиразрядного АЦП потребовалось бы 255 компараторов и 255 триггеров.
. Так, для восьмиразрядного АЦП потребовалось бы 255 компараторов и 255 триггеров.
|
|
|
Существенно меньшие аппаратурные затраты требуются в АЦП последовательного действия. На рис. 4.21 приведена схема следящего АЦП, относящаяся к группе схем последовательного действия. Сравнение  и
и  выполняется на комбинированном аналоговом компараторе Kс двумя выходами: «больше» (>) и «меньше» (<). Если
выполняется на комбинированном аналоговом компараторе Kс двумя выходами: «больше» (>) и «меньше» (<). Если  , то единичный сигнал оказывается на выходе>, при этом элемент
, то единичный сигнал оказывается на выходе>, при этом элемент  проводит тактовые импульсы на суммирующий вход (+1) реверсивного счетчика СР. Растет выходное число СР, и соответственно увеличивается , формируемое ЦАП. Если
проводит тактовые импульсы на суммирующий вход (+1) реверсивного счетчика СР. Растет выходное число СР, и соответственно увеличивается , формируемое ЦАП. Если  , то единичный сигнал появляется на выходе, при этом импульсы от генератора тактовых импульсов проходят на вход вычитания (-1) СР и уменьшается.
, то единичный сигнал появляется на выходе, при этом импульсы от генератора тактовых импульсов проходят на вход вычитания (-1) СР и уменьшается.
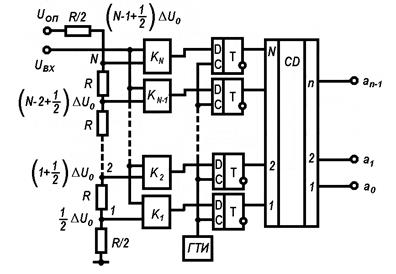
Рис. 4.20. Схема АЦП параллельного действия

Рис. 4.21. Схема следящего АЦ
При выполнении условия  на обоих выходах K выделяются нулевые сигналы и элементы и
на обоих выходах K выделяются нулевые сигналы и элементы и  оказываются запертыми для тактовых импульсов. Счетчик прекращает считать, и остающееся на его выходе неизменным число появляется на выходе регистра Р. Разрешение на запись числа в регистр дает единичный сигнал элемента ИЛИ—НЕ, включенного на два выхода K. Рассматривая данную схему относительно и , можно установить, что АЦП представляет собой замкнутую по выходной координате систему регулирования с регулятором K релейного действия. Система отслеживает эталонным напряжением на выходе ЦАП изменение входного напряжения с установившейся точностью
оказываются запертыми для тактовых импульсов. Счетчик прекращает считать, и остающееся на его выходе неизменным число появляется на выходе регистра Р. Разрешение на запись числа в регистр дает единичный сигнал элемента ИЛИ—НЕ, включенного на два выхода K. Рассматривая данную схему относительно и , можно установить, что АЦП представляет собой замкнутую по выходной координате систему регулирования с регулятором K релейного действия. Система отслеживает эталонным напряжением на выходе ЦАП изменение входного напряжения с установившейся точностью  и выдает на цифровом выходе число, соответствующее . Следящий АЦП позволяет быстро преобразовать достаточно медленное изменение входного напряжения. В самом неблагоприятном случае, когда скачком задано максимальное напряжение, для выдачи соответствующей выходной величины в цифровом коде потребуется
и выдает на цифровом выходе число, соответствующее . Следящий АЦП позволяет быстро преобразовать достаточно медленное изменение входного напряжения. В самом неблагоприятном случае, когда скачком задано максимальное напряжение, для выдачи соответствующей выходной величины в цифровом коде потребуется  тактов.
тактов.
|
|
|
5. ДАТЧИКИ
5.1. Общие понятия
Датчики являются неотъемлемой частью автоматизированного электропривода и используются для контроля действительных значений регулируемых величин. При этом они осуществляют преобразование значения контролируемого параметра в соответствующее ему значение электрического сигнала. Датчики можно классифицировать по принципу измерения и по типу конструкции. По принципу измерения (по абсолютным значениям или приращениям от нулевой точки) они подразделяются на абсолютные или циклические.
Абсолютные датчики обеспечивают показания значений текущих параметров относительно начало координат. Их характерной особенностью является то, что они обеспечивают каждому значению контролируемой величины единственное значение выходного сигнала. К этой разновидности датчиков относятся емкостные с переменным зазором, потенциометрические однооборотные и др.
Циклические датчики характеризуются тем, что у них изменение параметров выходного сигнала в функции смещения или вращения измеряемых элементов носит циклический характер, т.е. принимает одни и те же значения в различных точках участка измерения. Выходной сигнал циклического датчика может однозначно определить положение каждой точки измеряемого элемента только при наличии в измерительной системе счетчика полных циклов. Циклические датчики являются наиболее распространенными в системах измерения, контролирующих угловые и линейные перемещения.
По конструкции датчики могут быть линейными и круговыми. В линейных датчиках для измерения используются линейные перемещения конструкции, в круговых – угловые перемещения.
По виду сигналов датчики делятся на аналоговые и цифровые. В аналоговых датчиках выходная величина имеет непрерывный характер, а в цифровых - дискретный.
Датчики характеризуются рядом метрологических характеристик: величина контролируемого параметра, точность, чувствительность, порог чувствительности, стабильность работы.
Величина контролируемого параметра – это коэффициент преобразования, представляющий отношение изменения переменного параметра к величине, вызвавшей это изменение.
Точность датчика – это максимальная погрешность во всем диапазоне измерения.
|
|
|
Чувствительность датчика – это коэффициент преобразования, представляющий отношение изменения переменного параметра к величине, вызвавшей это изменение.
Порог чувствительности – это величина минимального изменения контролируемого параметра, которое может быть надежно и достоверно преобразовано в изменение соответствующего физического параметра.
Стабильность работы датчика – это максимальная разность значений переменного параметра, которая соответствует одной и той же величине контролируемого параметра, измеряемого многократно.
5.2. Датчики угла и рассогласования
Под термином «датчики угла» понимаются устройства, преобразующие угловую координату в электрическое напряжение. Это напряжение используется в системах АЭП как сигнал обратной связи по углу или как управляющий сигнал в задающих устройствах. Датчики угла находят применение в следящих системах для измерения угла поворота исполнительного вала. Задание на движение системы может выполняться также с помощью датчика угла, угловой координатой которого является угол поворота командной (задающей) оси. Разность сигналов этих двух датчиков, так называемое «рассогласование», подаётся как управляющий сигнал на вход системы.
В этом случае оба датчика могут рассматриваться как «датчик рассогласования». Задание на угловое перемещение может формироваться и без датчика угла с командной осью. Тогда используется эквивалент командной оси, т.е. заданная угловая координата выступает в закодированном виде, например в форме цифровой программы. В таких системах с программным управлением выходной сигнал датчика угла исполнительного вала вводится в программное устройство, вырабатывающее задание на движение. В простейших случаях датчик угла используется как бесконтактный потенциометр, командоаппарат, фазовращатель.
5.2.1. Датчики на основе сельсинов и вращающихся
трансформаторов
Для датчиков угла и рассогласования широкое применение нашли сельсины и вращающиеся трансформаторы.
Сельсин -небольшая электрическая машина переменного тока, имеющая две обмотки: однофазную (обмотку возбуждения) и трехфазную (обмотку синхронизации). По конструктивному признаку сельсины разделяются на два основных типа: контактные сельсины и бесконтактные сельсины. Основное исполнение первого типа — обмотка возбуждения расположена на роторе, обмотка синхронизации — на статоре. Этим уменьшается до двух число контактных колец и исключаются контакты на синхронизирующей связи. Идея бесконтактного сельсина реализуется двумя способами. При первом способе благодаря специальной конструкции магнитопровода ротора неподвижная кольцевая обмотка возбуждения создает в роторе поток, поворачивающийся вместе с ротором. При втором способе обмотка ротора получает питание от вращающейся совместно с ротором вторичной обмотки кольцевого трансформатора возбуждения с неподвижной первичной обмоткой.

Рис. 5.1. Координаты (а) и электрическая схема сельсина (б)
В схемах датчиков угла входная координата сельсина — угол поворота его ротора  , а выходные координаты — амплитуда
, а выходные координаты — амплитуда  или фаза φ выходного напряжения по отношению к переменному опорному напряжению (рис. 5.1, а ). В зависимости от использования той или другой выходной координаты различают амплитудный режим, когда (
или фаза φ выходного напряжения по отношению к переменному опорному напряжению (рис. 5.1, а ). В зависимости от использования той или другой выходной координаты различают амплитудный режим, когда ( (0 или π), а
(0 или π), а  , и режим фазовращателя, когда
, и режим фазовращателя, когда  а (
а ( ).
).
В амплитудном режиме обмотка возбуждения получает питание от сети переменного тока (рис. 5.1, б):
 . (5.1)
. (5.1)
Магнитный поток, действующий по осевой линии обмотки возбуждения, наводит соответствующие ЭДС в фазах обмотки статора. Пренебрегая потоком рассеяния и активным сопротивлением обмотки возбуждения, имеем для фазных ЭДС следующие выражения:
 , (5.2)
, (5.2)
где  — коэффициент трансформации между фазной статорной и роторной обмотками при их соосном положении.
— коэффициент трансформации между фазной статорной и роторной обмотками при их соосном положении.
Здесь за начало отсчета угла поворота ротора  принята осевая линия обмотки фазы А статора. Линейная ЭДС определится разностью соответствующих фазных ЭДС:
принята осевая линия обмотки фазы А статора. Линейная ЭДС определится разностью соответствующих фазных ЭДС:
 . (5.3)
. (5.3)
Если начало отсчета угла переместить на  в направлении к фазе В, то относительно угла -
в направлении к фазе В, то относительно угла -  в новой системе отсчета
в новой системе отсчета
 . (5.4)
. (5.4)
Характеристика управления сельсина в амплитудном режиме приобретает синусоидальную закономерность:
 . (5.5)
. (5.5)
Положительные значения Елm соответствуют  , а отрицательные (
, а отрицательные ( ). Для малых
). Для малых  , когда
, когда 
 (5.6)
(5.6)
где
 . (5.7)
. (5.7)
– передаточный коэффициент сельсина в амплитудном режиме.
Полученные выражения для характеристики управления и передаточного коэффициента не учитывают погрешностей, вносимых в передачу сигнала сельсином несинусоидальностью распределения магнитной индукции, асимметрией магнитопровода, неравенством параметров фаз статорной обмотки и т. п. Перечисленные факторы обусловливают статические погрешности, искажающие форму характеристики управления. Эти погрешности в зависимости от класса точности изготовления сельсина характеризуются определенным уровнем (рис. 5.2). Наибольшее влияние они оказывают в области малых углов, где полезный сигнал соизмерим с погрешностями. Кроме статических погрешностей при вращении сельсина, появляется скоростная погрешность из-за возникающей в обмотках ЭДС вращения. Эта погрешность увеличивается с ростом угловой скорости. Поэтому рабочие режимы сельсинов характеризуются ограниченным уровнем скорости по условиям допустимой скоростной погрешности.
В режиме фазовращателя обмотка статора получает питание от источника трехфазного напряжения с неизменной амплитудой. Образующееся круговое вращающееся поле в любой фиксированной точке статора, удаленной от оси отсчета (оси фазы A) на угол φ, характеризуется магнитным потоком
 . (5.8)
. (5.8)
Следовательно, в обмотке ротора, ось которой сдвинута на угол  относительно начала отсчета, наводится ЭДС
относительно начала отсчета, наводится ЭДС
 , (5.9)
, (5.9)

Рис. 5.2 Характеристика управления сельсина
где E1m— амплитуда фазной ЭДС статора, В.
Таким образом, характеристика управления сельсина и режиме фазовращателя определяется равенством
 . (5.10)
. (5.10)
В системах, в которых требуется более точное измерение угловой координаты вместо сельсинов, применяются синусно-косинусные вращающиеся трансформаторы (СКВТ). По своему устройству СКВТ – двухфазная микромашина переменного тока. Неявнополюсные статор и ротор имеют по две взаимно перпендикулярные обмотки: обмотку возбуждения и квадратурную на статоре, синусную и косинусную обмотки на роторе (рис. 5.3, а).
В амплитудном режиме обмотка возбуждения, расположенная но оси a, получает питание от источника переменного тока:
 . (5.11)
. (5.11)
Тогда в разомкнутых роторных обмотках наводятся ЭДС, амплитуды которых оказываются функциями угла поворота ротора:
для косинусной обмотки, расположенной по оси d,
 , (5.12)
, (5.12)
для синусной обмотки, расположенной по оси q,
 , (5.13)
, (5.13)
где kт — коэффициент трансформации между обмоткой возбуждения и каждой роторной обмоткой при их соосном положении.
Характеристики управления, определяемые (5.12) и (5.13), претерпевают определенные искажения в режиме нагрузки СКВТ, когда его роторные обмотки включены на сопротивления Zнd и Zнq (рис. 5.3, а). Возникающие токи в обмотках ротора (Idm и Iqm) создают МДС реакции по осям d и q (рис. 5.3, б):
 , (5.14)
, (5.14)

Рис. 5.3 Схема (а) и векторная диаграмма СКВТ (б)
 , (5.15)
, (5.15)
где  - фазы отставания токов Id и Iq от ЭДС в цепях роторных обмоток;
- фазы отставания токов Id и Iq от ЭДС в цепях роторных обмоток;  - модуль суммарного сопротивления цепи косинусной обмотки, Ом;
- модуль суммарного сопротивления цепи косинусной обмотки, Ом;  - то же синусной обмотки, Ом;
- то же синусной обмотки, Ом;  —амплитуда ЭДС роторной обмотки при соосном положении с обмоткой возбуждения в режиме нагрузки, В; Wp— число витков обмотки ротора.
—амплитуда ЭДС роторной обмотки при соосном положении с обмоткой возбуждения в режиме нагрузки, В; Wp— число витков обмотки ротора.
Результирующие МДС по осям статора:
 ; (5.16)
; (5.16)
 , (5.17)
, (5.17)
где  - МДС обмотки возбуждения и квадратурной обмотки, А.
- МДС обмотки возбуждения и квадратурной обмотки, А.
Из (5.16) и (5.17) следует, что при несимметричной нагрузке ротора  в его обмотках возникают дополнительные ЭДС от потока, создаваемого МДС реакции по оси b. При повороте ротора эти ЭДС изменяются в функции угла и вносят искажения в синусоидальную и косинусоидальную зависимости выходных ЭДС СКВТ. Искажения, вносимые реакцией по оси a, существенно меньше. Хотя МДС данной реакции зависит от угла поворота, однако изменение величины МДС компенсируется соответствующим изменением FВ. При достаточно малом сопротивлении обмотки возбуждения
в его обмотках возникают дополнительные ЭДС от потока, создаваемого МДС реакции по оси b. При повороте ротора эти ЭДС изменяются в функции угла и вносят искажения в синусоидальную и косинусоидальную зависимости выходных ЭДС СКВТ. Искажения, вносимые реакцией по оси a, существенно меньше. Хотя МДС данной реакции зависит от угла поворота, однако изменение величины МДС компенсируется соответствующим изменением FВ. При достаточно малом сопротивлении обмотки возбуждения
 .
.
Следовательно, магнитные потоки по осям α и Fα. остаются практически неизменными и искажения от реакции по оси α близки к нулю. При выполнении условия  , которое называется вторичным симметрированием, МДС реакции по оси β обращается в нуль, так как при
, которое называется вторичным симметрированием, МДС реакции по оси β обращается в нуль, так как при  ,
,  , и слагаемые в скобках (5.17) равны и противоположны по знаку, при этом МДС реакции по оси α оказывается постоянной величиной, не зависящей от угла поворота ротора:
, и слагаемые в скобках (5.17) равны и противоположны по знаку, при этом МДС реакции по оси α оказывается постоянной величиной, не зависящей от угла поворота ротора:
 .
.
Таким симметрированием полностью устраняются искажения характеристик управления СКВТ в режиме нагрузки. В тех случаях, когда по условиям применения СКВТ не удается выполнить вторичное симметрирование, используют так называемое первичное симметрирование, при этом МДС реакции по оси β компенсируются замыканием накоротко квадратурной обмотки и  . Полная компенсация данной реакции имеет место при условии равенства сопротивлений контуров обмотки возбуждения и квадратурной обмотки.
. Полная компенсация данной реакции имеет место при условии равенства сопротивлений контуров обмотки возбуждения и квадратурной обмотки.
СКВТ превосходят по классам точности сельсины. В пределах от нулевого до третьего классов точности допустимые погрешности СКВТ составляют 4— 22'. Наиболее точные малогабаритные СКВТ, например типа ВТМ нулевого класса, имеют погрешность, не превышающую 1,5''.

Рис. 5.4. Однофазная схема включения СКВТ для режима фазовращателя
В режиме фазовращателя обмотки статора получают питание от источника двухфазного напряжения. Образующееся при этом круговое поле наводит ЭДС в обмотке ротора, фаза которой линейно изменяется при повороте ротора. Данный режим можно получить в более простой схеме с использованием источника однофазного напряжения (рис. 5.4). В этой схеме принимаем следующие условия:  ; сопротивление обмотки ротора
; сопротивление обмотки ротора  ; сопротивление нагрузки
; сопротивление нагрузки  . При подключении обмотки возбуждения к напряжению в обмотках ротора наводятся ЭДС
. При подключении обмотки возбуждения к напряжению в обмотках ротора наводятся ЭДС
 ;
;
 ,
,
где  .
.
С соответствии со схемой
 ; (5.18)
; (5.18)
 . (5.19)
. (5.19)
Так как  , то с учетом (5.18) и (5.19) после простых тригонометрических преобразований получим
, то с учетом (5.18) и (5.19) после простых тригонометрических преобразований получим
 . (5.20)
. (5.20)
Если ось отсчета угла переместить на  против часовой стрелки, то относительно углов
против часовой стрелки, то относительно углов  в новой системе отсчета
в новой системе отсчета
 . (5.21)
. (5.21)
Таким образом, при  и вращении ротора амплитуда выходного напряжения
и вращении ротора амплитуда выходного напряжения  , а фаза равна углу поворота, при этом характеристика управления СКВТ в данной схеме фазовращателя имеет вид
, а фаза равна углу поворота, при этом характеристика управления СКВТ в данной схеме фазовращателя имеет вид
 . (5.22)
. (5.22)
Из двух сельсинов или СКВТ составляется схема датчика рассогласования, используемая для измерения сигнала рассогласования в следящих системах (рис. 5.5). Ротор сельсина-датчика (СД) соединен с командным штурвалом, а ротор сельсина-приемника (СП) — с исполнительным валом системы (рис. 5.5, а). Одна из роторных однофазных обмоток сельсинов получает питание и выполняет функцию обмотки возбуждения, другая является управляющей обмоткой, в которой наводится выходная ЭДС  . Соединенные электрически СД и СП работают в амплитудных режимах, имея входной величиной угол поворота СД и выходной ЭДС СП. Cозданные потоком обмотки возбуждения ЭДС в трёхфазной стабилизирующей обмотке дают соответствующие токи в замкнутой статорной цепи. Фазные ЭДС статора СП определяются как падения напряжения на реактивных сопротивлениях СП. Тогда для идентичных по параметрам СД и СП, пренебрегая ЭДС вращения, током нагрузки выходной обмотки СП, а также индуктивным сопротивлением рассеяния и активным сопротивлением обмотки возбуждения СД, можно определить амплитудные значения фазных ЭДС СП:
. Соединенные электрически СД и СП работают в амплитудных режимах, имея входной величиной угол поворота СД и выходной ЭДС СП. Cозданные потоком обмотки возбуждения ЭДС в трёхфазной стабилизирующей обмотке дают соответствующие токи в замкнутой статорной цепи. Фазные ЭДС статора СП определяются как падения напряжения на реактивных сопротивлениях СП. Тогда для идентичных по параметрам СД и СП, пренебрегая ЭДС вращения, током нагрузки выходной обмотки СП, а также индуктивным сопротивлением рассеяния и активным сопротивлением обмотки возбуждения СД, можно определить амплитудные значения фазных ЭДС СП:
 ;
;
 ;
;
 ,
,
где  - расчетное кажущееся сопротивление одной фазы стабилизирующей цепи СД и СП, Ом; хs — фазное индуктивное сопротивление рассеяния стабилизирующей обмотки одного сельсина, Ом;
- расчетное кажущееся сопротивление одной фазы стабилизирующей цепи СД и СП, Ом; хs — фазное индуктивное сопротивление рассеяния стабилизирующей обмотки одного сельсина, Ом;
R—фазное активное сопротивление стабилизирующей обмотки сельсина, Ом; хm—сопротивление взаимной индукции между роторной и статорной обмотками, приведенное к стабилизирующей цепи, Ом; индексом СД отмечены величины, относящиеся к сельсину-датчику, а СП — к сельсину-приемнику. Эти ЭДС трансформируются в обмотку управления СП, давая соответствующие составляющие выходной ЭДС датчика рассогласования:

В сумме три составляющие дадут результирующее амплитудное значение выходной ЭДС датчика рассогласования
 . (5.23)
. (5.23)
Если за согласованное состояние СД и СП принять взаимно перпендикулярное положение осей роторных обмоток, то рассогласование системы определится величеной  . Тогда относительно
. Тогда относительно  характеристика управления датчика рассогласования приобретает синусоидальную закономерность
характеристика управления датчика рассогласования приобретает синусоидальную закономерность
 . (5.24)
. (5.24)
Для малых углов рассогласования
 (5.25)
(5.25)
гдe
 (5.26)
(5.26)
- передаточный коэффициент датчика рассогласования, В/рад.

Рис. 5.5 Схемы датчиков рассогласования на сельсинах (а) и СКВТ (б)
Практически для большинства сельсинных пар в схеме датчика рассогласования
 . (5.27)
. (5.27)
Аналогично сельсинной паре работают СКВТ в схеме датчика рассогласования (рис. 6.5, б):
 . (5.28)
. (5.28)
Тогда относительно характеристика управления датчика рассогласования приобретает синусоидальную закономерность
 ; (5.29)
; (5.29)
 , (5.30)
, (5.30)
где xm и Z—сопротивление взаимной индукции и кажущееся сопротивление стабилизирующей обмотки СКВТ, определяемые так же, как и для сельсинов, Ом. Практически для схемы датчика рассогласования на СКВТ
 (5.31)
(5.31)
Использование сельсина в качестве аналогового датчика угла имеет ограниченные возможности в отношении точности. Практический диапазон измерения углов составляет ±60°. Если требуется измерять большие углы ( ), то сельсин соединяется с рабочим валом через понижающий редуктор с передаточным отношением
), то сельсин соединяется с рабочим валом через понижающий редуктор с передаточным отношением
 .
.
Точность измерения угла при этом снижается в iр раз.
5.2.2. Потенциометрические датчики
Эти датчики преобразуют угловое или линейное перемещение движка в выходное напряжение. На рис. 5.6 представлена схема потенциометрического датчика углового перемещения.

Рис 5.6 Потенциометрический датчик углового перемещения
На выводы 2-3 подается входное постоянное или переменное напряжение. Применяются проволочные и пленочные потенциометры. Проволочные делятся на одно- и многопроволочные, а пленочные – на металлопленочные и полупроводниковые. На рис. 5.7,а показана схема потенциометрического датчика линейного перемещения. С учетом регулирования характеристика этих датчиков нелинейная, (рис. 5.7,б), ее нелинейность тем больше, чем меньше  ,
,
где  - активное сопротивление нагрузки; R - полное сопротивление потенциометра. При
- активное сопротивление нагрузки; R - полное сопротивление потенциометра. При  нелинейность характеристики составляет 3-0,1% соответственно.
нелинейность характеристики составляет 3-0,1% соответственно.
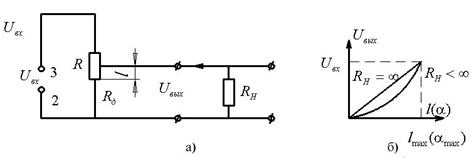
Рис. 5.7. Потенциометрический датчик линейного перемещения (а),
и ее характеристика (б)
На базе датчика углового перемещения строятся потенциометрические измерители углового рассогласования (рис. 5.8). Потенциометры ПД (датчик) и ПП (приемник) включены по компенсационной схеме.

Рис. 5.8. Потенциометрические измерители
углового рассогласования
Щетки потенциометров крепятся на осях в центрах каркасов и скользят по защищенным поверхностям обмотки. К потенциометрам подведено напряжение питания  .
.
Положение щетки ПД определяет угол поворота командного вала - входной угол  . Положение щетки ПП определяет угол поворота исполнительного вала (выходной угол
. Положение щетки ПП определяет угол поворота исполнительного вала (выходной угол  ), так как потенциометр ПП механически связан с исполнительным валом привода.
), так как потенциометр ПП механически связан с исполнительным валом привода.
Выходное напряжение  измерителя рассогласования (ИР) равно разности напряжений
измерителя рассогласования (ИР) равно разности напряжений
|
|
|
