 |


Работа шагового двигателя.
|
|
|
|
Рассмотрим работу униполярного шагового двигателя. При подаче на обмотку прямоугольного импульса ток изменяется так, как показано на рис.1.12.
Рис.1.12 – Общий вид характеристики  на обмотке шагового двигателя
на обмотке шагового двигателя
при импульсном воздействии
Как видно из графика (рис.1.12), ток обмотки ограничен напряжением питания обмотки  и её активным сопротивлением
и её активным сопротивлением  (
( ). Скоростные максимальные характеристики определяются наклоном прямой
). Скоростные максимальные характеристики определяются наклоном прямой  и постоянной времени обмотки
и постоянной времени обмотки  . Чем круче наклон прямой и меньше постоянная времени, тем более скоростной отклик можно получить от двигателя. Поэтому если мы хотим, чтобы двигатель уверенно управлялся на более высоких частотах, необходимо:
. Чем круче наклон прямой и меньше постоянная времени, тем более скоростной отклик можно получить от двигателя. Поэтому если мы хотим, чтобы двигатель уверенно управлялся на более высоких частотах, необходимо:
· повышать напряжение обмотки как можно ближе к максимально возможному (ограничивать может тахометр двигателя и выделяемое тепло обмоток);
· выбирать двигатель с меньшим значением индуктивности обмотки  ;
;
· выбирать двигатель с бóльшим омическим сопротивлением обмотки, что приведет к снижению тока  при том же напряжении и повышенному нагреву шагового двигателя.
при том же напряжении и повышенному нагреву шагового двигателя.
Так как изменение электрических состояний шагового двигателя обеспечивается переключением его обмоток, рассмотрим возможные циклы коммутации напряжений U 1 и U2 на обмотках ax и by статора (рис.1.13).
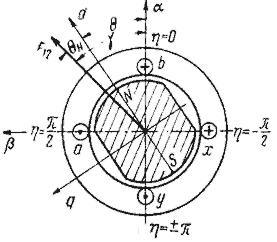
Рис. 1.13 Электрическая диаграмма ШД
Три возможных цикла переключения обеих обмоток в круговой последовательности показаны на рис. 1.14. Построенные циклограммы предполагают, что в моменты времени 0, t1, t2, t3,... коммутирующее устройство по командам управляющих импульсов N=0, 1, 2, 3,... выполняет одну из трех операций:
- включает с требуемой полярностью одну из обмоток на напряжение источника U, одновременно отключая другую обмотку (рис. 1.14.а);
- изменяет на обратную полярность включения одной из обмоток (рис. 1.14.б);
- только включает или только выключает одну из обмоток (рис. 1.14.в).
Рис..1.14.Циклы коммутации двухобмоточного шагового двигателя
|
|
|
Если двигатель переключается в соответствии с циклограммой на рис. 1.14а, то на интервале времени 0 - t1 включена первая обмотка ax с положительной полярностью. Это состояние (+ 1). С поступлением в момент времени t1 1-го управляющего импульса, обмотка ax отключается и включается с положительной полярностью вторая обмотка by. Мы получаем второе состояние (+2), которое сохраняется до момента времени t2. В этот момент 2-й управляющий импульс вызывает отключение обмотки by и включение с отрицательной полярностью обмотки ах. При этом двигатель переходит в третье состояние (-1). Четвертое и последнее состояние (-2) соответствует включению с отрицательной полярностью обмотки by. На этом цикл коммутации заканчивается, так как очередной управляющий импульс вызывает повторение состояния (+1). Мы рассмотрели четырехтактную поочередную коммутацию (+1) — (+2) — (-1) — (-2) — двухфазного шагового двигателя, работающего с изменением полярности включения обмоток. Продолжительность цикла коммутации равна периоду Т изменения напряжения на фазе. Каждому состоянию в пределах одного цикла коммутации соответствует строго определенное распределение поля статора (рис.1.14 в), которое удобно охарактеризовать пространственным вектором н.с. Положительные направления токов в обмотках ax и by, соответствующие состояниям (+1) и (+2), показаны на рис. 1.14 а. Следовательно, в состоянии (+1) пространственный вектор н.с. статора совпадает с положительной полуосью α, в состоянии (+2) - с положительной полуосью β, в состоянии (-1) - с отрицательной полуосью α состоянии (—2) — с отрицательной полуосью β. Очевидно, что в процессе коммутации обмоток поле статора вращается, причем каждому переключению соответствует поворот поля на угол α=π/2, а за цикл коммутации поле совершает полный оборот. Так как продолжительность любого такта коммутации не ограничена, то поле статора после установления тока в возбужденной обмотке может оставаться сколь угодно долго неизменным во времени и неподвижным в пространстве. Возможность получения статических состояний электромагнитного поля в рабочем зазоре является одним из характерных признаков шагового двигателя и составляет его главное отличие от обычной синхронной машины переменного тока.
|
|
|
Циклограмма коммутации на рис. 1.14 б соответствует парной четырехтактной коммутации с переменой полярности включения обмоток (+1)(+2) — (+2)(—1) — (—1)(—2) — (—2)(+1)... Здесь в каждом состоянии включены обе обмотки. Их совместным действием создается результирующее поле статора. Амплитуда основной волны результирующей н.с. статора в Ö2 раз больше, чем при поочередной коммутации. Во столько же раз возрастает амплитуда статического синхронизирующего момента. Каждое переключение обмоток по-прежнему вызывает поворот поля на угол α=π/2, однако статические положения оси результирующей н. с. статора в состояниях (+1)(+2)—(+2)(—1)—... смещены на угол π/4 по отношению к соответствующим положениям оси н.с. статора в состояниях (+1)—(+2) —...
Восьмитактная коммутация (+1)—(+1)(+2)—(+2)-(+2)(-1)-(-1)-(-1)(-2)-(-2)—(-2)(+1)... согласно циклограмме на рис. 1.14в представляет собой комбинацию двух первых способов переключения обмоток. В этом случае нечетным тактам коммутации соответствует возбуждение одной из обмоток, а четным — обеих обмоток. С каждым переключением поле статора поворачивается на угол π/4 и имеет восемь статических положений в пределах одного оборота. Амплитуда основной волны результирующей н. с. статора изменяется от такта к такту в Ö2 из-за включения различного числа обмоток шагового двигателя. Такая коммутация является несимметричной.
Для шаговых двигателей характерно дискретное изменение угла g, которое можно представить ступенчатой функцией  , где N = 0, 1, 2, 3... — число поданных управляющих импульсов. Ступенчатые функции для трех способов коммутации изображены на рис. 1.15.
, где N = 0, 1, 2, 3... — число поданных управляющих импульсов. Ступенчатые функции для трех способов коммутации изображены на рис. 1.15.
|
|
|
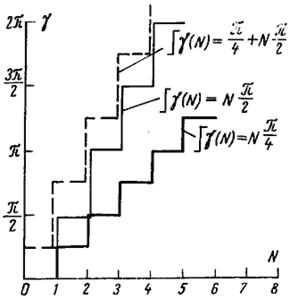
Рис. 1.15.Дискретное изменение угла в зависимости от подаваемых импульсов.
Датчик скорости.
Датчики на отражение (или щелевые датчики) предназначены для определения положения и измерения скорости вращения объекта. Щелевые ИК оптические датчики имеют разнесенные на определенном расстоянии друг от друга ИК излучатель и ИК приемник, оптические оси которых направлены друг на друга. Расстояние между излучателем и приемником (щель в корпусе датчика) и составляет рабочую область датчика. В обычном рабочем режиме излучатель светит на фотоприемник, который поддерживает на выходе высокий ток. При появлении непрозрачного объекта в рабочей области датчика луч прерывается, и ток на фотоприемнике падает, изменяя уровень сигнала на выходе датчика. На выходе сигнал изменится от напряжения логического "0" до напряжения логической «1», равной приблизительно напряжению питания датчика.
Рис. 1.16.Принцип действия датчика скорости.
Двигатель постоянного тока вращает диск с равномерно расположенными вдоль края границы отверстиями, которые во время вращения двигателя находятся в рабочей области датчика. Информация с датчика поступает в ЭВМ, где происходит подсчет количества сигналов логической «1» за определенный промежуток времени, таким образом, измеряется скорость вращения двигателя. [2]
Задание
1) Ознакомьтесь с расположением на стенде изучаемых элементов САР и с измерительной аппаратурой, необходимой при снятии характеристик этих элементов. [1]
2) Для двигателя постоянного тока снимите регулировочные характеристики. (см. методические указания) и найдите коэффициент усиления.
3) Для двигателя постоянного тока определите параметры  , используя его переходную характеристику.
, используя его переходную характеристику.
4) Для шагового двигателя снимите зависимость  для четырехтактной и восьмитактной коммутации обмоток, где
для четырехтактной и восьмитактной коммутации обмоток, где  угол поворота двигателя,
угол поворота двигателя,  число импульсов. Отследите изменение порядка подачи импульсов на управляющие обмотки для разных видов коммутации. Объясните полученные результаты.
число импульсов. Отследите изменение порядка подачи импульсов на управляющие обмотки для разных видов коммутации. Объясните полученные результаты.
|
|
|
