 |


Метод корневого годографа.
|
|
|
|
Исходные данные.
Исходными материалами КР являются функциональная схема базовой САУ и математические модели звеньев соответствующей структурной (алгоритмической) схемы.
Функциональная схема САУ:

Рис. 1
Здесь:
ОУ – объект управления, состоящий из двигателя постоянного тока (ДПТ) с независимым возбуждением. Влияние собственно нагрузки Н отражается воздействием момента сопротивления  и момента инерции Jн нагрузки Н на валу двигателя; ИП – измерительный преобразователь; У – усилитель постоянного тока, φз – задаваемый угол, φ – отрабатываемый угол.
и момента инерции Jн нагрузки Н на валу двигателя; ИП – измерительный преобразователь; У – усилитель постоянного тока, φз – задаваемый угол, φ – отрабатываемый угол.
При выполнении курсовой работы можно воспользоваться приведенной на рис.2 схемой замещения ДПТ, в которой учитывается как обратная связь по скорости Кω, так возмущающее воздействие Мc.

Рис.2
2.Режимы работы по нагрузке.
2.1.Номинальный режим:  ,
, 
2.2. Изменение момента инерции нагрузки, приведенное к валу двигателя.

2.3. Изменение момента сопротивления, приведенное валу двигателя

3. Задачи и этапы выполнения КР.
Главной задачей является устранение противоречия между требованиями к системе по устойчивости и требованиями по допустимой статической погрешности. Это достигается путем коррекции частотных характеристик разомкнутой системы и (или) методами корневого годографа. Основные этапы выполнения КР:
3.1. Составить структурную схему с входами по задающему воздействию  основному возмущению и выходом по регулируемой координате
основному возмущению и выходом по регулируемой координате  .
.
3.2. Составить структурную схему с входом и выходом при  .
.
3.3. Составить структурную схему с входом и выходом , при  .
.
3.4. Определить статический коэффициент передачи  , обеспечивающий устойчивость структуры и соответствующую ему статическую погрешность εгр = φз - φ в номинальном режиме (2,1.).
, обеспечивающий устойчивость структуры и соответствующую ему статическую погрешность εгр = φз - φ в номинальном режиме (2,1.).
|
|
|
3.5. Построить переходные функции по при  , указать прямые показатели качества этих характеристик, в частности εгр в установившемся режиме и длительность переходного процесса.
, указать прямые показатели качества этих характеристик, в частности εгр в установившемся режиме и длительность переходного процесса.
3.6. Выбором  и введением корректирующих звеньев обеспечить статическую погрешность в номинальном режиме
и введением корректирующих звеньев обеспечить статическую погрешность в номинальном режиме  и необходимую длительность переходного процесса. Определить схему и выбрать параметры корректирующих звеньев.
и необходимую длительность переходного процесса. Определить схему и выбрать параметры корректирующих звеньев.
3.7. Рассчитать и построить при переходную функцию по , указать ее показатели, в том числе запасы устойчивости по амплитуде и фазе.
3.8. Привести структурную и функциональную схемы после коррекции.
3.9. Определить погрешность отработки угла и изменения переходного процесса в режимах п.п. 2.2 и 2.3.
3.10. Привести сравнительную таблицу показателей переходного процесса до и после коррекции.
4.Оформление КР.
КР выполняется на листах формата А4. Каждая приведенная формула должна иметь порядковый номер и ссылку на литературу с указанием страницы. Расчетные и экспериментальные графики выполняются на миллиметровой бумаге или на листах с нанесенной сеткой. Каждый рисунок имеет свой порядковый номер.
Методические рекомендации по выполнению курсовой работы.
1. В начале выполнения курсовой работы надо обосновать выбор исходных данных, получаемых из предшествующей КР по курсу «Элементы и устройства систем управления» и вытекающих из паспортных данных выбранного двигателя [2].
2. Во многих случаях, особенно при использовании электронного усилителя, можно считать усилитель пропорциональным звеном. Такое допущение вполне обосновано, т.к. постоянные времени двигателя много больше постоянной времени электронного усилителя.
3. После обоснованного выбора передаточных функций всех звеньев функциональной схемы (рис.1) составляется полная структурная схема системы с входами по задающему воздействию φз и возмущениям. Обычно основное возмущение это момент сопротивления Мс.
|
|
|
Удобно так преобразовать структурную схему, чтобы привести ее к схеме с единичной обратной связью:
 |
Рис.3
4. Составляется характеристическое уравнение замкнутой структуры (рис.3) и определяется граничное значение статического коэффициента усиления усилителя Кгр такое, что при  система устойчива.
система устойчива.
Это удобно сделать с помощью критерия устойчивости Гурвица. Если усилитель У и измерительный преобразователь ИП считаются пропорциональными звеньями, т.е. их передаточные функции  и схема замещения ДПТ соответствует рис.2, то характеристическое уравнение системы имеет вид:
и схема замещения ДПТ соответствует рис.2, то характеристическое уравнение системы имеет вид:

и при положительных коэффициентах; достаточное условие устойчивости  позволяет определить Кгр.
позволяет определить Кгр.
При всех расчетах целесообразно проверять размерность вычисляемых величин, в частности, Кгр должна получиться безразмерной величиной.
Дальнейший анализ системы до коррекции проводится при 
5. Для нахождения переходной функции выполним действия, указанные ниже:

где  - передаточная функция замкнутой структуры.
- передаточная функция замкнутой структуры.
Строим переходную функцию при Мс=0, φз=const. Для этого можно воспользоваться пакетом MathCAD [7]. Необходима проверка по корням характеристического уравнения.
По графику переходной функции определяем показатели качества:
1) Длительность переходного процесса: 
2) Перерегулирование: 
3) Количество перерегулирований: N
После построения переходной функции необходимо найти ошибку в установившемся режиме. Для этого можно воспользоваться тем, что:

где: Wφзφ(p) – передаточная функция, связывающая φз и φ при Мс=0; Wмсφ(p) – передаточная функция, связывающая Мс и φ при φз=0. Известно, что чем больше К, тем меньше ошибка в установившемся режиме, т.е. тем точнее система. Для уменьшения ошибки надо увеличивать К, но увеличивать К мешают требования по устойчивости. Для обеспечения  требуется
требуется  .
.
При этом возникает неустойчивость и необходимость введения корректирующих звеньев.
Коррекцию можно проводить двумя способами: методом корневого годографа и по ЛАЧХ эквивалентной разомкнутой структуры.
|
|
|
Метод корневого годографа.
Корневым годографом [4,5] называется траектория корней характеристического уравнения замкнутой структуры на комплексной плоскости при изменении одного из параметров системы, обычно, статического коэффициента усиления. Корневой годограф представляет собой непрерывные линии, симметричные относительно действительной оси. Число ветвей корневого годографа равно порядку системы, т.е. числу полюсов разомкнутой структуры.
При синтезе систем путем введения корректирующих звеньев методом корневого годографа используют следующие виды корректирующих звеньев: дифференциальное, интегральное и интегро-дифференцирующее. На систему оказывают большее влияние корни, лежащие ближе к мнимой оси и мы пытаемся при помощи корректирующих звеньев избавиться от этих корней или отодвинуть их от мнимой оси. Дифференцирующее звено позволяет улучшить динамику переходного процесса. При интегральной коррекции для увеличения К вводится диполь. Диполем назовем нуль и полюс близко расположенные друг к другу и около начала координат. Интегральная коррекция позволяет путем введения диполя увеличить коэффициент усиления и следовательно уменьшить погрешность. Интегро-дифференцирующая коррекция включает в себя свойства дифференциальной и интегральной коррекции. Вводя дифференциальную цепочку мы обеспечиваем динамику переходного процесса, а затем вводя интегральную цепочку, т.е. вводя в систему диполь мы обеспечиваем необходимое значение коэффициента усиления, т.е. точность системы.
Пример на применение метода корневого годографа:
Пусть передаточная функция исходной структуры:

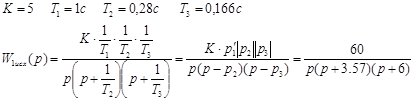
Приступая к коррекции, полезно иметь представление о корневом годографе исходной системы (рис.4), здесь p1, p2, p3 – полюса разомкнутой исходной системы.

Рис.4
Путем коррекции необходимо обеспечить:
tп≤1,5 с; КN=30; σ%=30%.
где:
tп – длительность переходного процесса;
KN – статический коэффициент передачи, определяемый погрешностью ε, в номинальном режиме;
|
|
|
σ% – перерегулирование.

ξ – затухание: отношение действительной части доминирующего корня характеристического уравнения замкнутой структуры к его мнимой части;
δ – действительная часть корня;
ω – мнимая часть корня.
Для нахождения затухания ξ по заданной величине перерегулирования σ% можно воспользоваться формулой:

Следовательно, доминирующий корень должен располагаться на линии m (рис.4).
Время переходного процесса и действительная часть корня связаны следующим выражением:

Отсюда:
Далее найдём мнимую часть корня:

Выбор в качестве доминирующего корня S1=-2+j3,82 преследует две цели: обеспечить заданное перерегулирование σ% и заданную длительность переходного процесса.
Последовательность расчета: вводя дифференциальную цепочку мы обеспечиваем динамику переходного процесса, а затем вводя интегральную цепочку, т.е. вводя в систему диполь мы обеспечиваем необходимое значение коэффициента усиления, т.е. точность системы.
Определим фазовые углы:

Фазовые соотношения в S1 (предполагается, что полюс p2 будет скомпенсирован соответствующим нулем корректирующей цепочки).

Следовательно, точка S1 не может принадлежать траектории корней исходной нескорректированной системы.
Введем дополнительный полюс P0 и нуль N0 с таким расчетом, чтобы полностью скомпенсировать полюс p2 = -3.57 нулем N0 = ‑3.57 и выполнить в точке S1 уравнение фаз.
Тогда уравнение фаз в S1 можно записать так:

где θ0 угол от полюса p0:

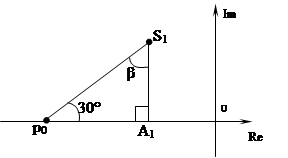 Из треугольника P0A1S1 (рис.5) легко определить координату полюса P0:
Из треугольника P0A1S1 (рис.5) легко определить координату полюса P0:
Рис.5

Итак, для того, чтобы S1 действительно стали доминирующими корнями системы необходимо последовательно ввести опережающее (дифференцирующее) звено с передаточной функцией:

Определим коэффициент усиления для скорректированной системы:
Запишем для S1 уравнение модулей:

Соответствующий этому значению «С» коэффициент усиления:

Что много меньше необходимого значения KN=30.
Для того, чтобы повысить коэффициент усиления вводится интегральное корректирующее звено, создающее в плоскости корней дипольную пару.

Выбираем нуль диполя:
 .
.
Найдем полюс Р д из условий заданного коэффициента усиления KN.

Чем больше КN, тем меньше Р д. Расположение Р д и N д дано на рис.6.

Рис.6
Итак, для обеспечения необходимого коэффициента усиления в систему надо ввести звено с передаточной функцией:

Передаточная функция скорректированной системы:

На рис.7 приведена схема интегро-дифференцирующего корректирующего звена.

|
|
|
Рис.7
«Данный пример показывает каким мощным орудием расчета является метод корневых годографов и синтез САУ в плоскости р. Радикальное улучшение статических и динамических свойств достигается при помощи простой интегродифференцирующей цепи, параметры которой определяются путем весьма простых построений и вычислений» [5].
|
|
|
