 |


Значение кодового и фазового методов измерения дальностей при различных способах позиционирования
|
|
|
|
Способами абсолютного позиционирования определяют полные координаты пунктов. Относительным позиционированием находят приращения координат или вектор между двумя пунктами. При относительном позиционировании основные измерения выполняются фазовым методом; параллельно с этим, в целях нахождения приближенных значений координат и разрешения неоднозначности фазовых циклов, измеряют кодовые псевдодальности.
Точность способов существенно различна: от долей сантиметра до сотни метров. Наибольшую точность обеспечивают дифференциальные и особенно относительные способы. В их основе лежит предположение, что измерения с двух станций до спутника искажены примерно одинаково. Чем станции ближе друг к другу, тем это утверждение точнее.
Автономно координаты определяют пространственной линейной засечкой по кодовым псевдодальностям, измеренным до четырех и большего числа спутников. Способ автономный в том смысле, что наблюдатель определяет местонахождение независимо от измерений на других станциях. Способ чувствителен к любым искажениям. Средние квадратические погрешности (СКП) в дальностях даны в табл. 1.
Таблица 1 - Погрешности в кодовых дальностях
| Источник погрешностей | СКП, м |
| КА - нестабильность частоты, уход шкалы времени | 1 |
| КА - эфемериды | 1 |
| Атмосфера - задержки в верхних и нижних слоя | 4,5 |
| АП - нестабильность частоты, уход шкалы времени, шумы, многолучевость | 1,5 |
| SA - избирательный доступ | 9,5 |
СКП псевдодальностей ~ ± 5 м, а в режиме SA ~ ± 10м. Чтобы оценить, как точно будут определены координаты, надо учесть так называемый геометрический фактор. Геометрический фактор (ГФ) характеризует потери точности из-за геометрии засечки (геометрии расположения спутников). ГФ очень важная характеристика качества измерений: чем ГФ больше, тем хуже засечка. СКП положения пункта в пространстве равна произведению ГФ на СКП измерения псевдодальностей. Стремятся, чтобы ГФ Ј 4. Полагая геометрический фактор равным 3 и учитывая ранее указанные точности измерений, найдем, что положение станции в пространстве будет зафиксировано с СКП ~±15 м, а в режиме SA ~±30 м. Предельная погрешность в 2-3 раза больше и составит соответственно ±30ё40 и ±100 м. Наблюдая одновременно спутники GPS и ГЛОНАСС, например приемником Ashtech GG24 Surveyor, за счет увеличения числа спутников, улучшения ГФ и отсутствия в российской спутниковой системе режимов AS и SA, координаты определяют с СКП < 10 м. Точность автономного способа повышают продолжительными (до 10-15 минут) наблюдениями на точке и совместной обработкой всех измерений.
|
|
|
Табл. 1 содержит приближенные оценки случайных погрешностей. Систематические, обусловленные задержками сигналов в АП, исключают. Для этого псевдодальности измеряют как минимум до 4 спутников и определяют 4 параметра - 3 координаты станции и искажения на ней. Приемниками типа GG24 Ashtech наблюдают минимум 5 ИСЗ и вычисляют 5 неизвестных - 3 координаты станции и аппаратурные задержки в измерениях до спутников GPS и до спутников ГЛОНАСС.
Дифференциальный способ. Погрешности в кодовых псевдодальностях большие. Однако, важно учитывать не только величины, но и характер влияния. Многие из них можно устранить. В дифференциальном способе, в отличие от автономного, псевдодальности до спутников измеряют с двух станций на земле. Одна ставится на пункте с известными координатами. Ее называют базовой или референц-станцией (base or reference station). Другая, подвижная (rover), размещается над новой точкой. На базовой станции измеренные псевдодальности сравнивают с расстояниями, вычисленными по координатам, и определяют их разности. Эти разности, так называемые дифференциальные поправки (differential corrections), передают на другую станцию для исправления измерений. Способ основан на предположении, что многие погрешности, кроме АП, одинаково влияют на измерения с каждой станции. В самом деле. Погрешности, возникающие на данном КА и из-за действия режима SA, на обеих станциях практически одни и те же.
|
|
|
Воздействия атмосферы на разных линиях могут несколько различаться по причинам:
а) разные длины трасс и б) локальные неоднородности на трассах (рис. 2). Когда расстояние между станциями <10 км, искажения на обеих трассах практически одинаковы.
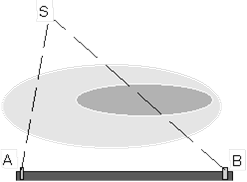
Рис. 2. Различные влияния атмосферы на трассах SA и SB
Рассмотрим, как влияют погрешности в координатах спутников (эфемеридах). На рис. 3 S истинное положение спутника, S’ фиктивное, соответствующее принятым координатам. Их смещение SS’ = d. Расстояние между станциями AB = D.
На рис. 3. не выдержан вертикальный масштаб; в действительности d «D, а D«R.
Соответственно дальности, вычисленные до станций A и B, искажены на малые величины
aS’ = d.cos(a + b) и bS’ = d.cos(a).
Угол b мал. Приблизительно b ~ D/R. Тогда разность искажений
DR = bS’ - aS’ = 2d sin(b/2) sin(a + b/2)» dbsin(a),= d.Dsin(a)/R.
при d = 10 м, R = 20 000 км и sin(a) = 1 получаем
DRмм = 0,5Dкм.
В формуле дальность D дана в километрах, а разность DR - в миллиметрах. Например, если расстояние между станциями 1 км, то разница в искажениях дальностей до одной и до другой станции составит всего 0,5 мм.
Погрешности в эфемеридах в значительной мере исключаются. Чем меньше расстояние между станциями, тем точнее коррекции. Что же касается искажений, вносимых АП, то их можно учесть, как и в автономном позиционировании.
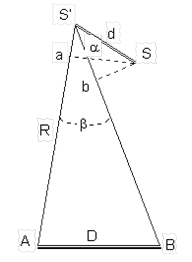
Рис. 3. Влияние погрешностей в эфемеридах КА
Поправки вводят или после измерений при обработке (постобработка), или передают их по дополнительному цифровому радиоканалу и учитывают в ходе измерений в реальном времени. Поправки быстро стареют, поэтому одновременно транслируют данные о скорости их изменения. Дифференциальные коррекции применяют и к фазовым измерениям.
Точность дифференциального позиционирования зависит от приемников, ГФ, программного обеспечения и колеблется от первых дециметров до нескольких метров. Коррекции к фазовым дальностям повышают точность до сантиметрового уровня (PDGP).
|
|
|
Радиотехническая комиссия по морской службе RTCM (Radio Technical Comission for Maritime Services) образовала специальный комитет SC-104, который разрабатывает вопросы по содержанию, форматам и способам передачи дифференциальных поправок.
Для передачи дифференциальных поправок используются средневолновый (275-2000 кГц) и УКВ (390-1550 МГц и 3-300 ГГц) радиоканалы. Геодезические приемники обычно имеют вход, позволяющий принимать в форматах RTCM SC-104 поправки в псевдодальности по каждому спутнику. Наличие RTCM-выхода, в свою очередь, дает возможность использовать приемник в качестве базового для генерирования и трансляции по дополнительному цифровому радиоканалу поправок на другие приемники. Формат RTCM SC-104 предусматривает трансляцию и неисправленных псевдодальностей, и фаз несущих волн. Поэтому в широком смысле под дифференциальным позиционированием часто понимают способ определения местоположения приемника в реальном времени по переданным данным (Leick, 1995).
Существует более 500 базовых станций, расположенных в разных странах мира, которые в своих прибрежных зонах передают дифференциальные коррекции в стандартном международном формате RTCM SC-104. Эти станции являются собственностью разных организаций и предлагают поправки свободно или за плату. Организованы службы, которые передают коррекции через спутники связи. В ряде стран созданы сети постоянно действующих базовых станций. Например, в Швеции 21 станция обеспечивает дифференциальные измерения по всей стране. В Российской Федерации также начато создание таких станций. Навигационные дифференциальные подсистемы (ДПС) условно подразделяют на локальные, региональные и широкозонные. Локальные ДПС имеют зону действия в радиусе 50 - 200 км от контрольно-корректирующей станции (ККС). Точность определения текущего местоположения: от 2 до 4,5 м. К локальным относят также геодезические ДПС с дальностью до 50 км и с дециметрово-сантиметровой точностью. Рабочая зона региональных ДПС простирается от 400 - 500 до 2000 км. Они могут иметь одну или несколько ККС. Примером является ДПС Startfix с дальностью действия свыше 2000 км, с 60 наземными ККС и четырьмя спутниками. Заявленная точность 1 - 2 м на дальностях до 1000 км и 3 м на дальностях свыше 2000 км.
|
|
|
Основой широкозонных ДПС является сеть ККС, передающих информацию в центр управления для их совместной обработки. Размер зоны около 5000 км. Широкозонной ДПС GPS и ГЛОНАСС является, например, система EGNOS (European Geo-stationary Navigation Overlay Service).
Корректирующая информация будет передаваться потребителям через геостационарные спутники AORE (Atlantic Ocean Region East) - 15,50 западной долготы и IOR (Indian Ocean Region) - 640 восточной долготы. Предполагаемая точность определения координат составит 2,5 - 5 м. Начало развертывания EGNOS - 1998 г., полная готовность будет достигнута в 2002 г. ДПС должны обеспечивать целостность системы. Целостность подразумевает нормальную работу всех спутников системы и своевременное оповещение пользователей о неполадках в ней. Так, служба контроля целостности EGNOS предупреждает пользователя менее, чем за 10 с. Помимо этого организуется контроль за достоверностью передаваемых поправок. При геодезическом использовании ДПС с этой целью следует выполнять контрольные измерения на пунктах с известными координатами.
Статика. Наиболее ощутимые выгоды от внедрения идеи исключения погрешностей достигнуты в способах относительных измерений. Как и в дифференциальном способе, аппаратуру устанавливают на двух станциях, например A и B. Одну из них также называют базовой или референц-станцией. Никаких коррекций не определяют, а формируют разности из наблюдений на станциях. В статике по разностям, свободным от многих искажений, вычисляют соединяющий эти станции вектор D:
D = (XB - XA, YB - YA, ZB - ZA)T
Базовая станция должна иметь точные координаты, чтобы по измеренным приращениям можно было бы вычислить координаты остальных пунктов геодезической сети.
Благодаря измерению приращений координат и применению фазового метода погрешности в результатах сведены к нескольким сантиметрам. Эти способы являются основными в геодинамических и важнейших геодезических работах.
Наиболее точным и трудоемким является способ статики. Точность статики зависит от продолжительности измерений. Измерения в течение 5 минут обеспечивают дециметровую точность (Cannon, 1994). Обычно продолжительность наблюдений на паре станций составляет около одного часа. За это время происходит накопление измерений, выполняемых через интервалы от 1 секунды до 5 минут.
|
|
|
При отслеживании минимум 5 КА для многих приемных систем характерны следующие значения СКП (Dкм расстояние до базовой станции в км):
| в плане | (5+1Dкм)мм | при Dкм< 10 км |
| в плане | (5+2Dкм)мм | при Dкм> 10 км |
| по высоте | (10+2Dкм)мм |
При увеличении продолжительности наблюдений с 1 до 6 часов СКП уменьшается более, чем в 1,5 раза (Kolosovskis, 1995). Меньшую продолжительность наблюдений имеет способ ускоренной статики, где имеет место активный поиск чисел неоднозначности. Главная цель - как можно быстрее разрешить неоднозначность. Время этих измерений согласовано с количеством наблюдаемых спутников. Так, при 5 спутниках наблюдения длятся до 20, а при 6 - до 10 минут. Еще менее трудоемки наблюдения в псевдостатике. Подвижный приемник на станции принимает сигналы примерно в течение 10 минут. Затем его переносят на другие пункты. По истечении часа приемник возвращают на прежние пункты и продолжают сбор данных. Таким образом, непрерывность измерений на базовой станции сохраняется, а на подвижной станции они зафиксированы только в начале и в конце часового интервала.
Одновременное наблюдение спутников GPS и ГЛОНАСС позволяет достичь сантиметровой точности в 3-6 раз быстрее.
Кинематика. Для съемочных и других работ, требующих значительных передвижений на местности, предложен ряд разновидностей способов кинематического позиционирования. Измерения начинают со станций A и B, координаты которых и, следовательно, вектор D между ними уже должны быть известны.
Процесс привязки подвижного приемника к базовому вектору называют инициализацией (от англ. initiate - начать). Ее цель - разрешить неоднозначность на известном базисе D. Применяют несколько способов инициализации.
. Положение вектора известно точнее 5 см. Приемники устанавливают на его концах и наблюдают несколько минут.
. Базовый вектор неизвестен. Его определяют статическим позиционированием.
. Применяют способ перестановки антенн (Antenna Swapping). Антенну одного приемника устанавливают над пунктом базовой станции, антенну другого - в стороне на 5 - 10 м. Выполняют измерения. Затем, не трогая треног, антенны меняют местами и вновь выполняют измерения. После этого антенны возвращают на исходные позиции и проводят измерения.
. Инициализация в полете (On The Fly - OTF). Исходное положение приемника определяют по псевдодальностям. Используя СКП псевдодальностей, оценивают объем пространства, содержащий точные значения расстояний. Перебором вариантов в этом пространстве рассчитывают числа неоднозначности. Неоднозначность разрешают за несколько секунд.
Инициализацию производят по 4 и более спутникам. Затем работающий приемник перемещают в некоторую другую точку, определяют ее координаты и т.д. Измерения ведут по одним и тем же спутникам. В случае потери сигналов спутников измерения повторяют, начиная с пункта с известными координатами. В практике позиционирования применяют сложные технологические схемы с повторными заходами на определяемые пункты и на пункты с известными координатами (Постоногов, 1994).
Способ непрерывной кинематики позволяет "цифровать" контуры на местности: не останавливаясь, перемещаются с приемником по контуру и через заданные интервалы времени фиксируют его координаты. Способ "Стой-иди" предусматривает возможность остановиться на точке, выполнить более длительные измерения, а затем продолжить движение. В этих способах полевые наблюдения и обработка разделены во времени. Когда имеется цифровой радиоканал, данные с базового приемника передают на
подвижный, и применяют способ кинематики реального времени. Ориентировочно точность кинематического позиционирования характеризуется СКП: ((10-20) + 2Dкм) мм.
|
|
|
