 |


Моделирование Моделирование и диагностика ЭЛЕМЕНТОВ электронных устройств и Электронных систем управления
|
|
|
|
Понятие модели. Для разработки электронных устройств систем управления технологическим оборудованием необходимо знать количественную зависимость между воздействиями на объект управления со стороны внешней среды или устройства управления и состоянием выходных параметров объекта. Эта зависимость может быть выражена в виде аналитических формул, уравнений, соотношений, программы, реализующей эти формулы и уравнения, некоторой электрической цепи, описываемой теми же уравнениями, макета объекта. Подобная информация о законах изменения параметров объекта называется моделью объекта.
В зависимости от цели исследования объекта могут строиться различные его модели. Так, при исследовании влияния размещения пассажиров на центровку самолетасамолёта моделью человека может служить мешок с песком, для конструктора одежды моделью человека может служить манекен, для медико-биологических исследований – животное (крыса, свинья). Модели объектов широко используются при диагностике состояния электронных устройств путемпутём сравнения изменений параметров модели с параметрами реальной электронной системы.
| Модель - специфическая форма отражения объекта, при которой отображаются свойства и закономерности объектов, существенно важные в данном процессе. |
Отражаются не все свойства, а только связанные с интересующим нас процессом. В отличие от образа, который является отражением совокупности свойств предмета в нашем сознании, модель есть отражение узкой группы свойств предмета и явления, необходимых для решения определеннойопределённой практической задачи, для предсказания результатов возможных решений, принимаемых человеком в его практической деятельности.
|
|
|
При исследовании технологических процессов или объектов моделями могут служить другие процессы или устройства, свойства которых в каком-то смысле близки.
Модель отражает функциональные свойства объекта и, как всякое отражение, не является тождественной объекту, поэтому необходимо ввести оценку, или критерий близости, т.е. соответствия модели данному объекту. Критерий обычно формируется как функционал от разности реакций объекта и модели на одни и те же воздействия. Критерий является числовой характеристикой данной модели, представляет собой "штраф" за расхождение реакций объекта и модели на одинаковые воздействия. По критерию выбирается оптимальная модель из некоторого класса моделей. Модель считается оптимальной, если значение критерия для неенеё минимально. Критерий зависит при этом от типа входного воздействия. Чтобы избежать неопределенностинеопределённости, критерий формируют как результат усреднения разности реакций модели и объекта по множеству входных сигналов и по времени.
Математические и физические модели. Первоначально понятие физической модели развилось из понятия физического аналога, например уменьшенной копии объекта. Оказалось, что многие процессы различной физической природы описываются одинаковыми уравнениями движения, например колебания груза на пружине, струны, тока в колебательном контуре. Следовательно, движение объекта одной физической природы может служить описанием движения объекта другой природы. Таким образом, физическая модель отделяется от материального носителя и возникает математическая модель как формулировка закона движения, совокупность уравнений, отражающих функциональные характеристики объекта.
Носителем математической модели помимо формул и программ для ЭВМ могут служить и другие физические устройства, которые описываются известными уравнениями. Таким образом происходит смещение понятий - отделение физической модели от конкретного материального носителя, когда одна и та же модель может быть реализована в устройствах различной физической природы, а математическая модель воплощается в конкретном материальном устройстве. Различие физической и математической модели носит чисто гносеологический характер.
|
|
|
Модель называется математической, если известно ее математическое описание. При этом модель может быть реализована в виде материального устройства. Модель называется физической, еслиее математическое описание неизвестно, но реакции модели схожи с реакциями объекта.
Противоречия модели. Модель является лишь приближенным описанием процессов переноса вещества и энергии в технологических установках, при этом степень приближения, а следовательно, и точность описания могут быть различными. Точность модели определяется, с одной стороны, нашими знаниями о процессах, происходящих в объектах, а с другой стороны (что более существенно), нашим умением анализировать сложные модели, т.е. развитием математического аппарата для исследования динамики процессов управления.
Наиболее разработаны методы исследования линейных дифференциальных уравнений с постоянными коэффициентами. Именно поэтому чаще всего в качестве моделей принимаются линейные стационарные звенья. Следовательно, для исследования динамики систем управления технологическими объектами исключительно важное значение имеет выбор класса моделей объектов. Если же результаты расчета систем управления на основе выбранной модели существенно отличаются от результатов экспериментальной проверки, то это свидетельствует о грубости модели и необходимости замены ее более сложной моделью и, следовательно, применении более сложных и трудоемких математических методов. Аналогична ситуация и для физической модели, где стремление к точности вступает в противоречие с техническим уровнем эксперимента и возможностями экспериментатора.
Одна и та же модель может быть удовлетворительна для описания одних процессов, и непригодна для других. Например, прямоугольная ломаная, аппроксимирующая кривую намагничивания магнитомягкого ферромагнитного материала, вполне приемлема для расчета магнитных усилителей без обратной связи, но совершенно не годится для расчетарасчёта усилителей с внутренней положительной обратной связью.
|
|
|
Отметим еще одно противоречие модели объекта управления. Модель оценивается по сходству ее реакций с реакциями объекта на одни и те же воздействия. Этими воздействиями являются управляющие сигналы с регулятора. Может оказаться, что при одних входных сигналах меньшее значение штрафа за несовпадение будет у одной модели, при других входных воздействиях - у другой модели. Например, модель А точнее описывает реакции объекта на низкочастотные сигналы, а модель Б - на высокочастотные, поэтому при низкочастотном входном сигнале предпочтительна модель А, при высокочастотном - модель Б. Следовательно, значение критерия оценки качества модели зависит от закона распределения управляющего сигнала, а последний - от параметров и структуры регулятора. Однако модель создается именно для того, чтобы с ее помощью выбрать регулятор и определить управляющие воздействия на объект.
Выбор модели должен предшествовать выбору закона управления, а выбор закона управления - выбору модели. Разрешить это противоречие возможно методом последовательных npuблuжeнuй. Вначале выбирается модель первого приближения на основе теоретического анализа процессов в системе. По этой модели выбираются параметры регулятора. Затем выбирается модель второго приближения в эксперименте, где используется выбранный регулятор. По уточненнойуточнённой модели корректируются параметры регулятора. Если объект достаточно хорошо описывается линейным дифференциальным уравнением с постоянными коэффициентами, т.е. существуют такие значения коэффициентов описания модели, что уравнение становится тождеством, то модель является полной. В случае полной модели отсутствует разница в поведении объекта и модели для точки рассмотрения поведения модели.
Модели, в частности, используются для проверки законов воздействия внешних факторов и оценки состояния системы.
|
|
|
Возможны следующие основные формы применения моделей:
ü определение действительных параметров электронных устройств;
ü оценка параметров внешних воздействий;
ü оценка состояния электронной системы;
Идентификацией называется определение динамических характеристик объекта управления в рамках выбранной модели. Методы идентификации делятся на пассивные и активные. Метод идентификации называется активным, если на объект подаются специальные воздействия с целью определения его динамических характеристик. Пассивные методы идентификации - такие методы, в которых модель объекта выбирают по результатам наблюдения входного и выходного сигналов в процессе нормальной эксплуатации и на объект не подаются никакие специальные сигналы с целью выявить его свойства. Пассивные методы особенно удобны тем, что не нарушают нормального хода технологического процесса. Однако преимущество активных методов в том, что энергия тестового воздействия сосредоточена в узкой временной или частотной области, поэтому реакции объекта на тестовые сигналы выявить легче и надежнее.
В технологиях диагностики электронных устройств модели могут использоваться для оценки влияния неконтролируемых внешних воздействий на устройство. В этом случае схема диагностики ЭУ может быть представлена в следующем виде
Модель устройства может использоваться как для оценки состояния системы. так и для вычисления параметров устройства, недоступных для прямых измерений.
При полунатурном моделировании совместно с модельными звеньями используются реальные элементы системы. Этот метод обеспечивает большее соответствие результатов моделирования эксперименту.
Полунатурное моделирование используется:
- если устройство находится еще в стадии проектирования, но элементы устройства управления уже изготовлены;
- если объект управления не может быть испытан в лабораторных условиях (не могут быть проведены натурные испытания);
- если элементы устройства управления имеют нелинейные характеристики, которые при аналитическом моделировании не учитывались или заменялись линейными.
Полунатурное моделирование реализуется в технологии использования тестовых структур ИС.
При полунатурном моделировании связь устройства управления с внешними элементами обеспечивается сопрягающими устройствами ввода- вывода (приборным интерфейсом) и исполнительными подсистемами.
Диагностика отказов.
Диагностика отказов включает операции обследования состояния устройства, выявления аномалий, если они возникли, и принятия соответствующих мер. Диагностика отказов имеет несколько уровней, в частности уровень, на котором проверяют наличие или отсутствие отказа, а также уровень, на котором устанавливают место, где произошелпроизошёл отказ.
|
|
|
При определении отказов можно воспользоваться изменениями параметров состояния ЭУ. Такими параметрами могут быть уровень вибраций, частота вращения приводов, уровень шумов и т.д. Следует иметь в виду, что параметры состояния представляют собой величины, изменения которых носят случайный характер.
| Рис. Распределение вероятностей параметров состояния. Очень часто в нормальном и аномальном случаях распределения параметров состояния накладываются друг на друга. Естественно, чтобы различать параметры состояния, необходимо выбрать такой критерий, при котором указанное наложение оказывается малым. | 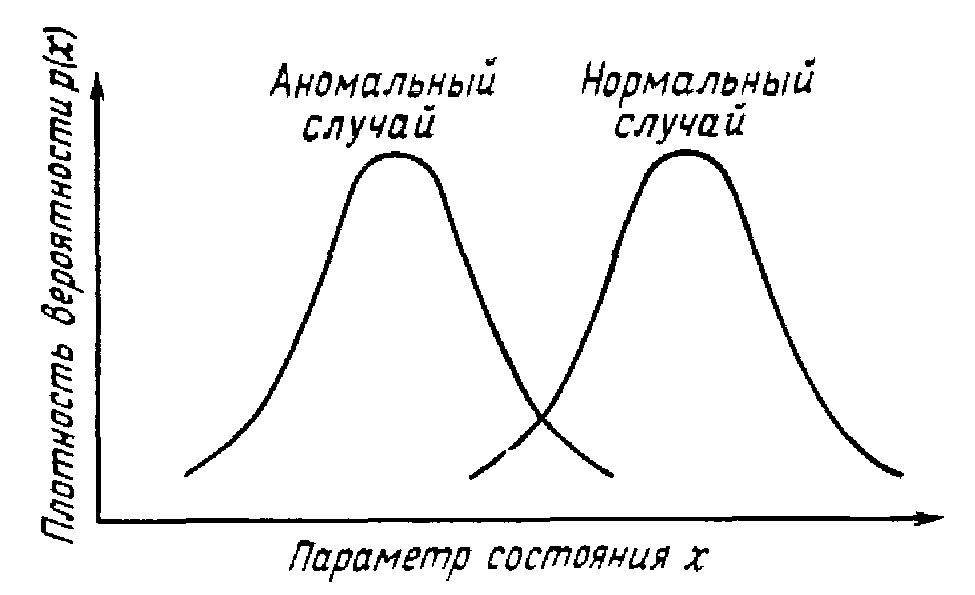
|
Таким образом, задачу о существовании или отсутствии отказа можно свести к критериям значимости, т.е. принадлежит или нет к генеральной совокупности нормального случая выборка значений параметров состояния, полученных при работающем устройстве. Обычно распределения генеральных совокупностей нормальных значений (работоспособное состояние) являются нормальными. Судить об отказе можно не только по изменениям средних значений, но, в некоторых случаях, и по различиям форм распределений.
Т.к. приходится иметь дело со случайными событиями, необходимо принимать во внимание вероятность ошибки. Во-первых, существует вероятность того, что аномальный случай будет принят за нормальный, т.е. вероятность недосмотра. Во-вторых, существует вероятность того, что нормальный случай примут за аномальный по причине неверной информации (дезинформации). Обе вероятности противоречат друг другу. При нахождении компромиссного решения обычно руководствуются тем, что было ранее. Если вероятность недосмотра мала, то возрастетвозрастёт вероятность неверной информации, вследствие которой необходимо провести техническое обслуживание, в котором нет необходимости. Когда занижена дезинформация, возрастает вероятность недосмотра и у устройства может произойти грубый отказ.
при обнаружении отказов можно пользоваться критерием отношения вероятностей.
Для некоторого параметра состояния х можно считать, что распределения вероятностей появления этого параметра для нормального и аномального случаев можно представить в виде (рис.).
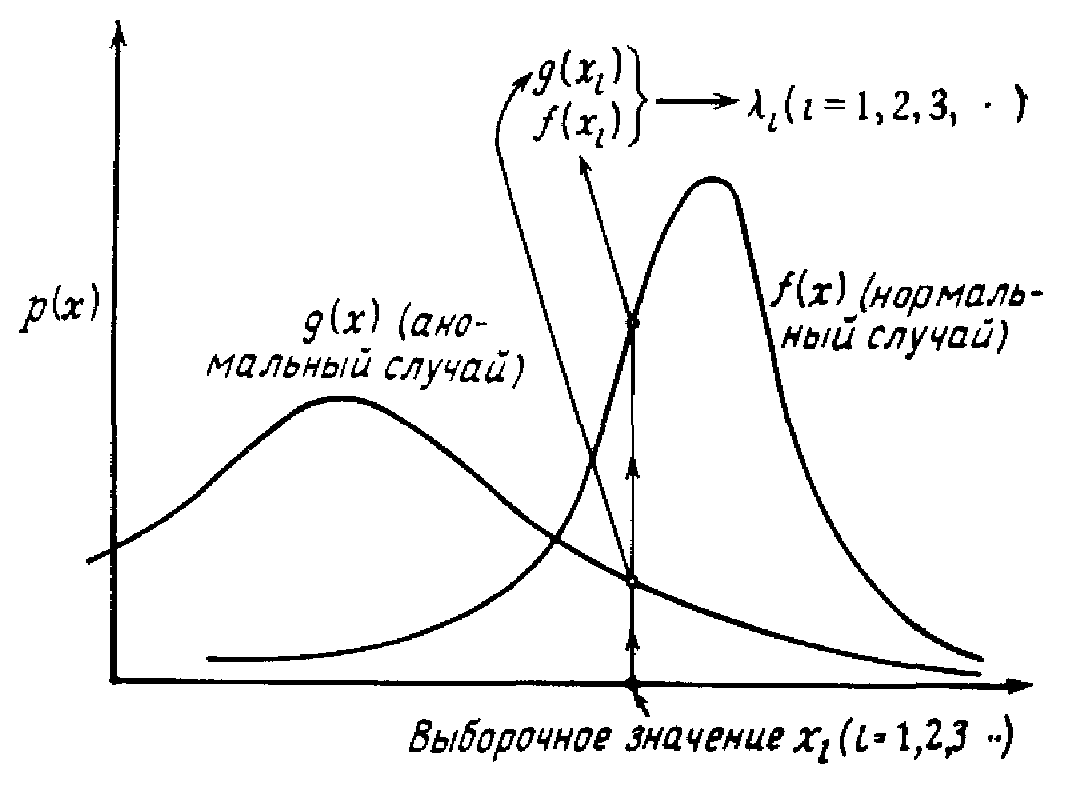
Рис. Метод последовательного критерия отношения вероятностей.
Здесь мы имеем дело с плотностями вероятности f(x) и g(x), известными до работы устройства. С момента начала работы устройства для параметра состояния х во временной последовательности осуществляется выборка значений x1, x2,, x3. Таким образом, в каждый момент времени можно определить величину li, которую можно представить в виде

При нормальном функционировании (нормальное состояние намного вероятнее аномального) почти для всей выборки справедливо неравенство


поэтому происходит уменьшение величины li. Наоборот, в аномальном случае величина li должна увеличиваться.
Для диагностики отказов используют опорные величины l, что позволяет принимать следующие решения:
li>la – аномальный случай
la> li> ln – решение принять нельзя
ln> l i – нормальный случай
Вероятность неверной информации (дезинформации) a
Обнаружить место, в котором произошелпроизошёл отказ можно, если выяснить, к какой категории принадлежит замеренное значение параметра состояния, который в большинстве случаев представляет собой вектор. В действительности, каждый элемент имеет сложные связи (рис.). Поэтому, чтобы установить, к какой категории отнести элемент, приходится проводить анализ многих переменных.
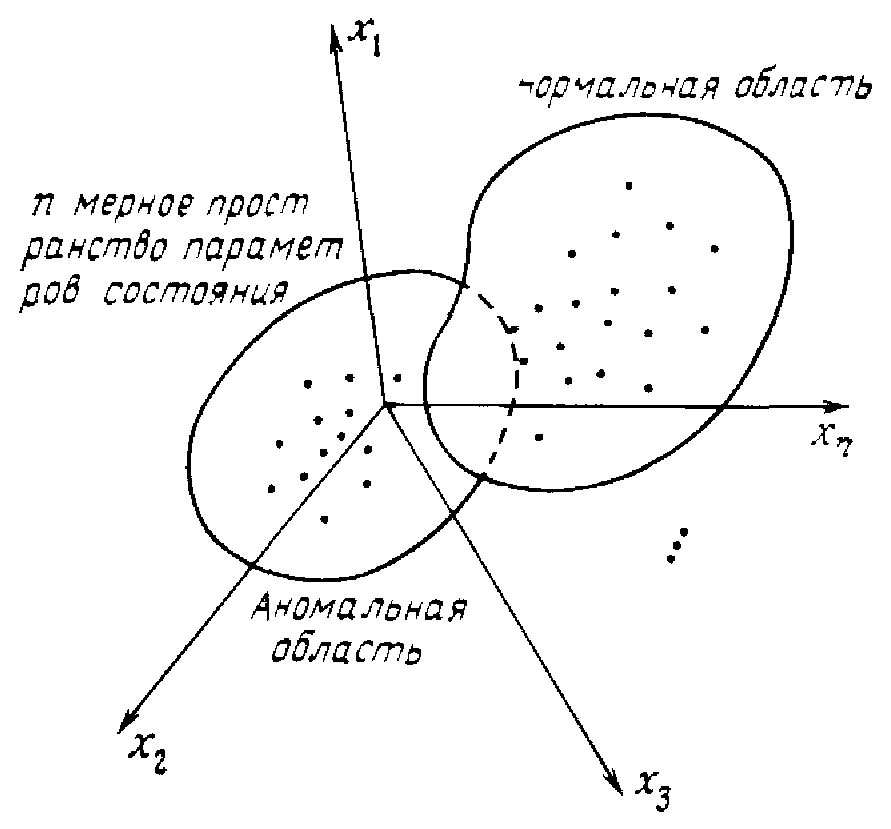
Рис. Пространство реальных характеристических параметров состояния устройства.
Связи, которые существуют между причинами возникновения отказов и соответствующими симптомами, являются не детерминированными, а неотчетливыминеотчётливыми. При этом очень часто сам симптом описывается неотчетливонеотчётливо (неоднозначно), например "изменился уровень вибрации НЖМД при включении ПК". В настоящее время разработаны теоретические методы, с помощью которых рассматриваются неотчетливыенеотчётливые явления (нечеткаянечёткая или фузифицированная логика). В этих методах используется функция членства, которая позволяет выяснить истинность (неложность) некоторого описания (утверждения). Указанная функция имеет диапазон изменения 0…1. Если описание является полностью ошибочным, то (А) = 0. Если оно совершенно правильно, то (А) = 1. В том случае, когда 0<(А)<1, истинность или ложность описания определены нечетконечётко.
Установление факта и места неисправности путемпутём определения состояния всех элементов и связей обычно нецелесообразно или практически невозможно, т.к. для такого "стопроцентного" контроля требуются большие затраты времени и оборудования. Особенно это относится к сложным объектам диагностики (ОД). основные цели технической диагностики – изучение форм и закономерностей проявления неисправностей и ошибок, разработка методов и средств их обнаружения и локализации в объектах диагностирования.
В процессе диагноза технического состояния ОД необходимо решение задач изучения физических свойств объекта и неисправностей, построения математических моделей неисправностей. Затем следуют задачи анализа диагностических моделей (ДМ) с целью получения данных, необходимых для построения алгоритма диагностирования и принципов реализации технических средств диагностирования.
В результате анализа диагностической моделей определяют:
- перечень оцениваемых диагностических показателей,
- методы их оценки,
- условия работоспособности,
- признаки наличия дефектов,
- алгоритмы и программу диагностирования.
Совокупность этих данных называют диагностическим обеспечением (ДО). Все модели ДО можно подразделить на непрерывные, дискретные и специальные.
Непрерывные модели используются при разработке диагностического обеспечения для отдельных устройств и приборов. Эти модели в основном описываются алгебраическими линейными и нелинейными уравнениями. дискретные ДМ представляются конечно-разностными уравнениями или конечными автоматами и предназначены для диагностического обеспечения импульсных и цифровых устройств.
Специальные модели подразделяют на информационные, модели характеристик объекта и функциональные информационные потоки, циркулирующие в объекте, рассматриваемые как преобразователь информации. Информационные потоки могут представлять собой информационную оценку изменений, происходящих в состоянии объекта диагностирования. Универсальность этого типа моделей объясняется независимостью от принципа построения и действия объекта. Эта модель характеризует лишь потоки информации о состоянии объекта, циркулирующие в нем. Модели могут представлять статические и динамические характеристики объекта в целом либо его отдельных частей. Методы исследования ДМ подразделяют на аналитические, графические и графо - аналитические.
Аналитические методы обеспечивают возможность реализации способов оптимизации и получения соотношений, описывающих состояние объекта при его изменении. К таким способам можно отнести методы малого параметра, теории чувствительности, математической логики, планирования эксперимента и распознавания образов. Аналитические методы универсальны и эффективны, однако решение становится слишком громоздким при возрастании сложности моделей.
Графические методы наглядны, они позволяют иллюстрировать аналитические методы. Графические методы весьма полезны при исследовании моделей характеристик объекта или процессов, протекающих в реальном времени. Особое место среди графических методов занимают методы, основанные на теории графов (ориентированных и неориентированных). При этом матричное представление структурных свойств графов более удобно.
Различные комбинации графических и аналитических методов составляют графо- аналитические методы. При выполнении анализа непрерывных моделей, описываемых линейными алгебраическими и дифференциальными уравнениями, а также при применении методов теории графов широко используется аппарат теории матриц. Это позволяет представить решения и исследования систем уравнений в удобной и лаконичной форме, а также построить вычислительные алгоритмы для реализации процессов на ЭВМ.
Аппарат математической логики, главной задачей которой является структурное моделирование объектов, позволяет осуществлять также анализ специальных ДМ, характеризуемых конечным числом состояний.
Классификация методов диагностирования
Оценку состояния устройств осуществляют различными методами. В результате такой классификации с учетом характера взаимодействия объекта и технических средств диагностирования можно выделить два метода - функциональное и тестовое диагностирование.
При методе функционального диагностирования объекта осуществляется наблюдение за его функционированием при воздействии лишь рабочих воздействий и оценки его состояния по диагностическим признакам.
При методе тестового диагностирования осуществляют специальное воздействие, при этом ответная реакция объекта сравнивается с различными известными реакциями его состояния. Тестированию часто подвергается не сам объект, а эквивалентное ему по параметрам функциональности и надежностинадёжности устройство. Тестовая структура изготавливается, как правило, из тех же элементов, что и основное ЭУ, выполняет ограниченный набор функций, содержит меньшее число элементов, но, работающих с большими коэффициентами нагрузки.
Таким образом, можно отметить, что метод функционального диагностирования аналогичен режиму пассивного эксперимента, а тестовое диагностирование – режиму активного эксперимента. Для решения задач оценки работоспособности, поиска дефектов, прогнозирования возможных изменений состояния электронных устройств используются оба метода диагностирования.
Другой признак классификации - степень связи объекта и технических средств диагностики. По этому признаку различают методы, основанные на оценке выходных или промежуточных показателей объектов диагностирования. Методы оценки выходных параметров объекта используются в основном при тестовом диагностировании и обеспечивают возможность установления работоспособности, а также обнаружения возникших в нем дефектов. Использование метода оценки промежуточных показателей предполагает необходимость введения в диагностируемое устройство специальных контрольных точек.
одним из способов оценки состояния ОД является метод оценки совокупности диагностических показателей (использование обобщенных показателей). Допустим, имеем вектор показателей х = F(x1, x2,¼ хN) и оценки вероятности попадания его в область работоспособного состояния диагностируемого устройства. Такая задача имеет два решения: показатели пространства вектора показателей могут попасть либо в пространство V1, либо в V2, соответствующие работоспособному и неработоспособному объектам.
по различным характеристикам можно судить о состоянии объекта, поэтому используются также методы оценки характеристик в целом или в отдельных точках. Здесь появляется еще один признак классификации состояния ОД – методы оценки по динамическим и статическим характеристикам. При этом оценка ОД по динамическим характеристикам может быть реализована по временным и частотным характеристикам.
Существует и ряд других методов оценки[14].
|
|
|
