 |


Мачтовые и мачтово-стреловые краны
|
|
|
|
Мачтовые и мачтово-стреловые краны являются стационарными кранами, что ограничивает область их применения. Их используют главным образом для монтажа сборных конструкций и технологического оборудования крупных строительных объектов.
Мачтовые краны. У мачтового крана поворотная мачта опирается на раму-фундамент и дополнительно прикрепляется к зданию или расчаливается вантами. На мачте устанавливается поворотная стрела - укосина. Для подъема груза используют имеющуюся в распоряжении лебедку, к которой в зависимости от требуемой грузоподъемности подбирают полиспаст.
Мачтово-стреловые краны по виду крепления мачты делятся на вантовые и подкосные.
Вантовые мачтово-стреловые краны. Такой кран (рис.74) состоит из мачты 9, стрелы 8, грузового 6 и стрелового 3 полиспастов, опорной рамы 11, лебедок 14 и вант 2. Стрела крепится шарнирно к мачте у ее нижнего основания и вместе с ней может поворачиваться вокруг вертикальной оси с помощью поворотного круга 10 на 360°. Механизм вращения мачты и стрелы - канатный. Мачта опирается внизу на специальную шаровую пяту 15, а вверху мачту через неподвижную опору / раскрепляют четырьмя-восемью вантами (в зависимости от грузоподъемности), расположенными обычно под углом 30° к горизонту. Ванты натягивают и удерживают в натяжении в процессе эксплуатации ручными лебедками или стяжными муфтами, прикрепляемыми к якорям. Стрела стрелоподъемным полиспастом связана с оголовком мачты. Концевые ветви стрелового и грузового полиспастов через отводные блоки 12, 13 вводятся внутрь мачты и через отверстие в пяте стрелы выводятся на барабаны электрореверсивных лебедок 14. Для увеличения вылета основной стрелы и высоты подъема груза ее оборудуют управляемым с помощью полиспаста 7 гуськом 4 и вторым механизмом подъема груза и полиспастом 5 меньшей грузоподъемности.
|
|
|
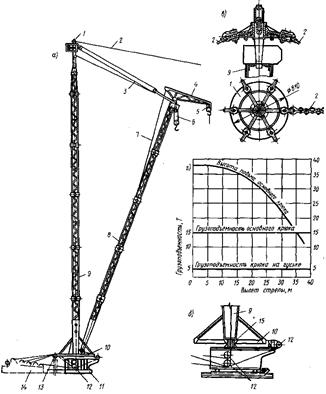 Рис.74. Вантовый мачтово-стреловой кран: а ‑ общий вид; б ‑ нижняя опора крана; в ‑ оголовок; г ‑ график грузоподъемности
Рис.74. Вантовый мачтово-стреловой кран: а ‑ общий вид; б ‑ нижняя опора крана; в ‑ оголовок; г ‑ график грузоподъемности
|  Рис.75. Подкосный мачтово-стреловой кран со схемой к расчету натяжений в вантах
Рис.75. Подкосный мачтово-стреловой кран со схемой к расчету натяжений в вантах
|
70 Экскаватор с крановым оборудованием — экскаватор-кран (рис.121, г) используют на различных монтажных и погрузочно-разгрузочных работах. В комплект кранового оборудования входят удлиненная решетчатая стрела 10, стрелоподъемный 1 и грузовой 2 полиспасты, крюковая подвеска или специальные устройства для захвата грузов.
Экскаватор с грейферным оборудованием (рис.121, д) применяют при погрузке и выгрузке сыпучих и мелкокусковых материалов, очистке траншей и котлованов от обрушившегося грунта и снега, для рытья колодцев и узких глубоких котлованов в легких грунтах, а также для рытья траншей под водой. Грейферное оборудование включает удлиненную решетчатую стрелу 10, двухчелюстной грейферный ковш 17, подъемный 11 и замыкающий 16 канаты. Наполнение ковша происходит в результате смыкания его челюстей при натяжении замыкающего и ослаблении подъемного канатов. Разгрузка ковша осуществляется при ослаблении замыкающего каната.
В городском строительстве наиболее широко применяют полноповоротные строительные экскаваторы с механическим приводом 3...5 размерных групп на пневмоколесных и гусеничных ходовых устройствах. Основным рабочим оборудованием таких машин является обратная лопата.
Экскаваторы с гидравлическим приводом. Одноковшовые экскаваторы с гидравлическим приводом представляют собой многомоторные полно- и неполноповоротные машины с жесткой подвеской рабочего оборудования, у которых для передачи мощности от двигателя к рабочим механизмам используется гидравлический объемный привод. По сравнению с механическими гидравлические экскаваторы имеют более широкую номенклатуру сменных рабочих органов, число которых постоянно растет, большее количество основных и вспомогательных движений рабочего оборудования, что значительно расширяет их технологические возможности и обеспечивает высокий уровень механизации земляных работ, особенно в стесненных условиях городской застройки.
|
|
|
Различают гидравлические экскаваторы с шарнирно-рычажным (рис.124, а, б) и телескопическим (рис.124, в) рабочим оборудованием, для удержания и приведения в действие которого используют жесткие связи — гидравлические цилиндры. Основными рабочими движениями шарнирно-рычажного оборудования являются изменение угла наклона стрелы, поворот рукояти с ковшом относительно стрелы и поворот ковша относительно рукояти, телескопического — выдвижение и втягивание телескопической стрелы.
Гидравлические полноповоротные экскаваторы с шарнирно-рычажным рабочим оборудованием созданы на базе единых конструктивных схем, широкой унификации агрегатов и узлов и серийно выпускаются 3...6-й размерных групп. Привод сменного рабочего оборудования таких экскаваторов осуществляется от гидроцилиндров двустороннего действия, а поворот платформы и передвижение машины— от индивидуальных гидромоторов. К основным видам сменного рабочего оборудования относятся прямая и обратная лопаты, грейфер и погрузчик.
 Рис.124. Одноковшовые гидравлические полноповоротные экскаваторы с жесткой подвеской рабочего оборудования: а, б — шарнирно-рычажного; в — телескопического; 1 — опорно-поворотное устройство; 2 — пневмоколесное ходовое устройство; 3 — выносная опора; 4 — поворотная платформа; 5 — силовая установка; 6, 8, 9 ‑ гидроцилиндры стрелы; 7 — стрела; 10 — рукоять; 11 ‑ ковш обратной лопаты; 12 — бульдозерный отвал; 13 — кабина машиниста; 14 — гусеничное ходовое устройство; 15 — ковш прямой лопаты; 16 — телескопическая стрела
Рис.124. Одноковшовые гидравлические полноповоротные экскаваторы с жесткой подвеской рабочего оборудования: а, б — шарнирно-рычажного; в — телескопического; 1 — опорно-поворотное устройство; 2 — пневмоколесное ходовое устройство; 3 — выносная опора; 4 — поворотная платформа; 5 — силовая установка; 6, 8, 9 ‑ гидроцилиндры стрелы; 7 — стрела; 10 — рукоять; 11 ‑ ковш обратной лопаты; 12 — бульдозерный отвал; 13 — кабина машиниста; 14 — гусеничное ходовое устройство; 15 — ковш прямой лопаты; 16 — телескопическая стрела
|
В качестве сменных рабочих органов гидравлических экскаваторов при выполнении обычных земляных работ используют ковши 1...3 обратных (рис.125) и прямых 4 лопат различной вместимости, ковши для дренажных работ 5 и рытья узких траншей 6, ковши с зубьями и со сплошной режущей кромкой для планировочных 7 и зачистных 8 работ, двухчелюстные грейферы для рытья траншей и котлованов 9 ипогрузки крупнокусковых материалов и камней 10, погрузочные ковши большой вместимости для погрузочных работ 11...13, бульдозерные отвалы 14 для засыпки ям, траншей и небольших котлованов, захваты для погрузки труб и бревен 15, крановую подвеску 16 для различных грузоподъемных и монтажных работ, многозубые 17 и однозубые 18 рыхлители для рыхления мерзлых и плотных грунтов и взламывания асфальтовых покрытий, пневматические, гидравлические 19 и гидропневматические 20 молоты многоцелевого назначения со сменными рабочими инструментами для разрушения скальных и мерзлых грунтов, железобетонных конструкций, кирпичной кладки и фундаментов, дорожных покрытий, дробления негабаритов горных пород, трамбования грунтов, погружения свай и шпунта, бурами для бурения шпуров и скважин и т. п. В комплект оборудования обратной лопаты (рис.126, а) входят: стрела (моноблочная Г‑образной формы или составная 1, 6 изменяемой длины), рукоять 5, поворотный ковш 4 и гидроцилиндры 2, 3, 8 подъема стрелы, поворота рукояти и ковша. Копание грунта производят поворотом ковша относительно рукояти и поворотом рукояти относительно стрелы. Копание можно осуществлять только поворотом ковша относительно неподвижной рукояти, что позволяет вести работы в стесненных условиях, а также в непосредственной близости от подземных коммуникаций.
|
|
|
 Рис.125. Сменные рабочие органы гидравлических экскаваторов
Рис.125. Сменные рабочие органы гидравлических экскаваторов
|
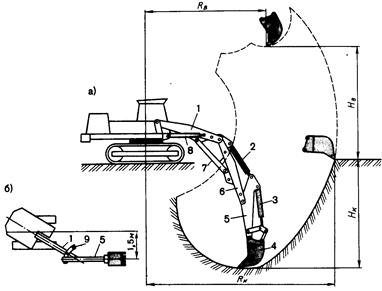 Рис.126. Рабочее оборудование обратной лопаты
Рис.126. Рабочее оборудование обратной лопаты
|
Поворотом ковша производят не только копание, но и выгрузку грунта, а также зачистку основания забоя. Толщину срезаемой при копании стружки регулируют путем подъема или опускания стрелы. Составная стрела дает возможность изменять глубину Hк и радиус Rк копания (а также высоту выгрузки Hв) что в сочетании со сменными профильными ковшами различной вместимости позволяет расширить область применений экскаватора и использовать его с максимальной производительностью в различных грунтовых условиях.
|
|
|
Основная 1 и удлиняющая 6 части составной стрелы соединены шарниром и тягой 7, установкой которой в различные положения на удлиняющей части достигается изменение длины стрелы. На основную часть стрелы устанавливают оборудование прямой лопаты, грейфера и погрузчика. При работе вблизи фундаментов зданий и других сооружений, а также при копании траншей, ось которых не совпадает с продольной осью экскаватора, в оборудовании обратной лопаты применяют специальную промежуточную вставку 9 (рис.126, б), позволяющую устанавливать рукоять 5 с гидроцилиндром под углом в плане к продольной оси стрелы 7. Вставка обеспечивает смещение оси копания до 1,5 м относительно продольной оси машины. Оборудование со смещенной осью копания является одним из преимуществ гидравлических экскаваторов.
Прямая лопата с поворотным ковшом широко применяется на экскаваторах 4...6-й размерных групп и предназначена для разработки грунта как выше (преимущественно), так и ниже уровня стоянки машины, а также для погрузочных работ. Оборудование прямой лопаты включает (рис.127): стрелу 1, рукоять 2, ковш 3 и гидроцилиндры 4, 5, 6 подъема стрелы, поворота рукояти и ковша. Копание грунта осуществляется поворотом рукояти и ковша, движущегося от машины в сторону забоя. Толщину стружки регулируют подъемом или опусканием стрелы. При разгрузке ковш поворачивают гидроцилиндром 4. Прямой лопатой с поворотным ковшом можно производить планирование и зачистку основания забоя.
Погрузчик применяют для погрузки сыпучих и мелкокусковых материалов выше стоянки экскаватора, разработки и погрузки в транспортные средства (или отсыпки в отвал) грунтов 1...11 категорий, а также планировочных работ на уровне стоянки машины. Вместимость ковша погрузчика в 1,5...2 раза больше вместимости ковша обратной лопаты, что значительно повышает производительность экскаватора при использовании его на погрузочных работах.
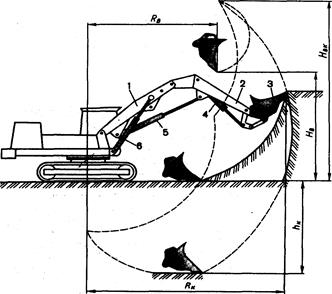 Рис.127. Рабочее оборудование прямой лопаты
Рис.127. Рабочее оборудование прямой лопаты
|
 Рис.128. Рабочее оборудование погрузчика
Рис.128. Рабочее оборудование погрузчика
|
В комплект погрузочного оборудования (рис.128) входят: стрела 1, рукоять 4, ковш 3 и гидроцилиндры 2, 5, 7 подъема стрелы, поворота рукояти и ковша. Кинематическая схема погрузчика обеспечивает горизонтальное движение ковша от экскаватора при внедрении его в грунт или штабель материала и планировочных работах. После внедрения в разрабатываемый материал возможен поворот ковша для лучшего его заполнения гидроцилиндром 2, которым поворачивают поднятый на заданную высоту ковш при разгрузке.
|
|
|
Грейфер (рис.129) применяют для рытья котлованов, траншей, колодцев и при погрузочно-разгрузочных работах. Особенно эффективно использование такого оборудования при копании глубоких выемок, а
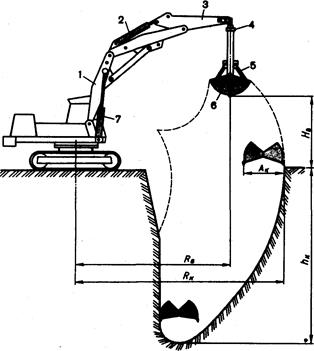 Рис.129. Рабочее оборудование грейфера
Рис.129. Рабочее оборудование грейфера
|
также в стесненных условиях. На гидравлических экскаваторах устанавливают жестко подвешенные грейферы у которых необходимое давление на грунт при врезании создается принудительно с помощью гидроцилиндров рабочего оборудования. Это позволяет эффективно разрабатывать плотные грунты независимо от массы грейфера. Грейфер шарнирно крепят к рукояти обратной лопаты вместо ковша таким образом, чтобы было возможно его продольное и поперечное раскачивание. Оборудование грейфера (рис.129) состоит из составной стрелы 1, рукояти 3 и гидроцилиндров 2, 7, используемых от обратной лопаты, двухчелюстного грейферного ковша б с гидроцилиндрами 5 для замыкания и открывания челюстей и механизмом 4 поворота ковша в плане. Челюсти ковша в исходном положении раскрыты. Наполнение его происходит при смыкании челюстей гидроцилиндрами 5. Необходимое напорное усилие создается опусканием стрелы. Разгружают ковш размыканием челюстей. Для глубокого копания колодцев до 30 м,
траншей и котлованов в оборудовании грейфера используют удлиняющие промежуточные вставки.
Грейферное оборудование на напорной штанге (рис.129) применяют для разработки узких и глубоких (до 20 м) траншей с вертикальными стенками в грунтах I...IV категорий с каменистыми включениями размером до 200 мм при возведении подземных сооружений способом «стена в грунте», а также для разработки выемок под сваи в промышленном, городском и сельском строительстве.
Способом «стена в грунте» можно возводить без отрывки котлована подземную часть промышленных и гражданских зданий и сооружений, стены насосных станций, тоннели метрополитенов неглубокого заложения, колодцы коллекторов, борта каналов и т.п.
Грейферное оборудование устанавливают на базовой части стрелы экскаваторов 5-ой размерной группы и включает в себя напорную штангу 5, грейферный ковш 3, направляющий корпус 4 с механизмом перемещения штанги, рычажный механизм 2, гидроцилиндры подъема-опускания штанги и наклона штанги в поперечной плоскости. Направляющий корпус шарнирно соединен с кронштейном, относительно которого может быть повернут двумя гидроцилиндрами в вертикальной плоскости на угол 90° вдоль продольной оси экскаватора. Дополнительным гидроцилиндром 7 штанга может быть наклонена в поперечной плоскости на угол γ в обе стороны от вертикали. Рабочим органом оборудования является гидравлический двухчелюстной грейфер (рис.130, б) с приводом сменных челюстей полукруглой формы от двух гидроцилиндров 10, расположенных внутри его корпуса. Режущие кромки челюстей снабжены сменными зубьями, а боковые стенки — резцами с износостойкой наплавкой. Грейфер крепится к напорной штанге, перемещаемой канатным механизмом, смонтированным на направляющем корпусе. Механизм перемещения (подъема-опускания) штанги состоит из двух унифицированных лебедок, каждая из которых включает барабан 13 для перематывания напорно-возвратного каната 14, трехступенчатый цилиндрический редуктор 12 (аналогичный редуктору механизма передвижения экскаватора), тормоз и гидромотор 11. Напорное движение на грейфер создается весом штанги с грейфером и лебедками.
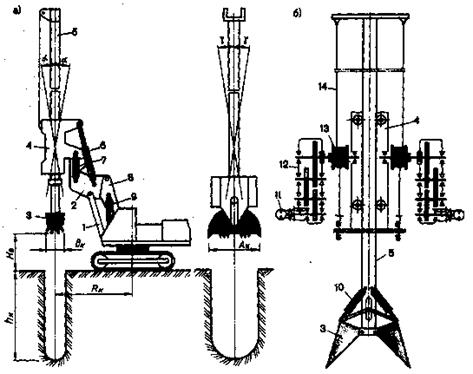 Рис.130. Грейферное оборудование для возведения сооружений методом «стена в грунте»: а — общий вид; б — кинематическая схема механизма перемещения штанги
Рис.130. Грейферное оборудование для возведения сооружений методом «стена в грунте»: а — общий вид; б — кинематическая схема механизма перемещения штанги
|
Рычажный механизм 2 (рис.130, а) жестко крепится к базовой части стрелы и через упорную стойку 1 к пяте стрелы 8. В процессе работы упорная стойка воспринимает нагрузки от рабочего оборудования. Перевод рабочего оборудования из рабочего положения в транспортное обеспечивается поворотом гидроцилиндрами 6 направляющего корпуса 4, со штангой назад на 90° при одновременном опускании вперед гидроцилиндрами 9 базовой части стрелы с кронштейном и упорной стойкой 1. Вертикальное положение оборудования контролируется прибором, датчики которого установлены на направляющем корпусе, а указатели - в кабине машиниста. Гидросистема грейферного оборудования питается от насосной установки базового экскаватора. Управление грейферным оборудованием гидравлическое и осуществляется из кабины машиниста.
71 Домкраты. В строительстве домкраты используют при монтажных и ремонтных работах для подъема груза на небольшую высоту, воздействуя на груз снизу. Наиболее распространены реечные, винтовые и гидравлические домкраты.
Реечный домкрат состоит из корпуса 1 (рис.44.), в котором по направляющим перемещается рейка 2, имеющая поворотную головку 3 и лапу 4. Рейка с грузом поднимается или опускается вращением
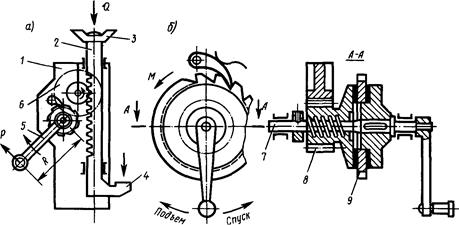 Рис.44. Реечный домкрат: а — общий вид; б — грузоупорный тормоз
Рис.44. Реечный домкрат: а — общий вид; б — грузоупорный тормоз
|
рукоятки 5 через зубчатые передачи 6. Для безопасной работы домкрат оборудован грузоупорным тормозом, который действует следующим образом. Вал 7 и зубчатое колесо 8 имеют винтоную нарезку. Между торцовыми поверхностями втулки и рукоятки расположено храповое колесо 9 с собачкой. При подъеме груза рукоятка перемещается по резьбе влево, заклинивает храповое колесо и через зубчатую передачу выдвигает рейку вверх, поднимая груз. По окончании подъема груза вал рукоятки фиксируется собачкой храпового колеса, препятствующей вращению вала в обратную сторону. При опускании груза рукоятка вращается в обратную сторону и одновременно перемещается по резьбе вправо, освобождая храповое колесо. Под действием момента от силы тяжести груза через зубчатую передачу втулка зубчатого колеса ввинчивается в рукоятку, зажимает храповое колесо и препятствует свободному падению груза. Процесс опускания груза состоит из чередующихся падений и остановок. В отрегулированном тормозе (.минимальном зазоре между храповиком и рукояткой) неравномерность опускания груза практически не ощущается. При ручном приводе и кратковременной работе усилие на рукоятке допускается не более 200Н, а при непрерывной — не более 80 Н. Грузоподъемность реечных домкратов — до 6 т, высота подъема — до 0,6 м.
 Рис.45. Винтовой домкрат (а) и рукоятка (б)
Рис.45. Винтовой домкрат (а) и рукоятка (б)
|
Винтовой домкрат. Он состоит из корпуса / (рис.45.) с бронзовой гайкой 8, винта 2 с прямоугольной или трапецеидальной резьбой, грузовой головки 3 и рукоятки 6 с трещоткой. Рукоятка свободно надета на круглую часть винта. Трещотка представляет собой колесо 4 с зубьями, надетое на квадратную часть винта, и собачку 7. В зависимости от направления винта собачку поворачивают на оси 5 в одно из крайних положений, где собачка удерживается стопором 9 с пружиной 10. Винтовые домкраты не требуют дополнительных устройств для удержания
груза, так как винтовая пара (винт—гайка) —самотормозящаяся. В самотормозящихся передачах угол подъема винтовой линии X, меньше угла трения р (обычно 4...6°). Это одновременно является и недостатком таких передач, так как у них КПД всегда меньше 0,5. Грузоподъемность винтовых домкратов — до 50 т, высота подъема до 0,35 м. При грузоподъемности более 20 т усилие на рукоятке становится значительным и поэтому рукоятка с трещоткой заменяется червячной передачей, а ручной привод — машинным.
Гидравлический домкрат (рис.46) состоит из цилиндра 6, являющегося одновременно его корпусом, поршня 5, насоса /, всасывающего 3, нагнетательного 4 и спускного 7 клапанов. При ручном приводе насос и бак 2 с жидкостью объединены с корпусом домкрата. Рабочей жидкостью служит минеральное масло или незамерзающая смесь (вода, смешанная со спиртом или глицерином). Рукояткой 8 плунжеру насоса
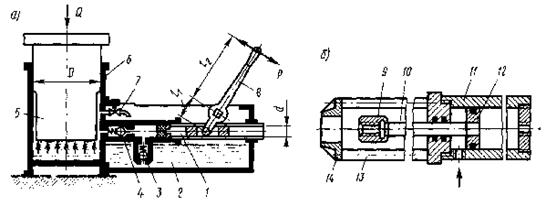
| Рис.46. Гидравлический домкрат |
сообщается возвратно-поступательное движение. При движении плунжера вправо цилиндр насоса через всасывающий клапан заполняется жидкостью, а при движении влево жидкость под давлением через нагнетательный клапан поступает под поршень основного цилиндра. Гидравлические домкраты с ручным приводом имеют грузоподъемность до 200 т и высоту подъема до 0,18...0,2 м.
При машинном приводе жидкость в цилиндр домкрата подается от отдельного гидравлического насоса, а грузоподъемность одиночного домкрата может достигать 500 т. При машинном приводе несколько домкратов могут быть приведены в действие от одной насосной станции и осуществлять подъем крупных сооружений.
Для натяжения стержней или канатов при монтаже предварительно напряженных конструкций применяют тянущие домкраты. Такой домкрат состоит из цилиндра 11, штока 10 с поршнем 12, стойки 13 и упорной плиты 14. На конце штока имеется гайка 9 для соединения его со стержнем. Домкрат закрепляют в стойке, служащей упором. При подаче масла в домкрат шток вместе с поршнем перемещается, производя натяжение стержня. Тянущие домкраты развивают усилия 630 и 1000 кН при ходе штока 315 и 400 мм и работают от насосной станции с рабочим давлением 40 МПа.
|
|
|
