 |


Обзор существующих конструкций
|
|
|
|
Курсовой проект
По дисциплине «Электрические и гидравлические приводы мехатронных и робототехнических устройств»
На тему «Проектирование привода коленного сустава двуногого антропоморфного робота»
Специальность (направление подготовки) 15.03.06 Мехатроника и робототехника
Автор работы (проекта) Скрыльников Н. Е.
(подпись, дата)
Группа МТ-41б
Руководитель работы (проекта) Мальчиков А. В.
(подпись, дата)
Работа (проект) защищена
(дата)
Оценка
Председатель комиссии Мальчиков А. В.
Члены комиссии
Курск, 2017 г.
ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ
Студент (слушатель) Скрыльников Н. Е. шифр 150306 группа МТ-41б
(фамилия, инициалы)
1. Тема «Проектирование привода коленного сустава двуногого антропоморфного робота»
2. Срок представления работы (проекта) к защите «_____» ___________ 20 ___ г.
3. Исходные данные:
время вертикализации – это 2 с;
масса бедра – это 10 кг;
масса верхней части робота – 40 кг;
4. Содержание пояснительной записки курсовой работы (проекта):
4.1. Введение
4.2. Обзор существующих конструкций
4.3. Выбор двигателя и редуктора
4.3.1 Математическое моделирование
4.3.2 Выбор двигателя
4.3.3 Выбор редуктора
4.4 Проверочный расчет
4.4.1 Расчет по перегрузке
4.4.2 Тепловой расчет
4.5. Результаты
5. Перечень графического материала:
Руководитель работы (проекта) ____________________ Мальчиков А. В. (подпись, дата) (инициалы, фамилия)
Задание принял к исполнению ____________________________
(подпись, дата)
Содержание
Введение
1. Обзор существующих конструкций
2. Описание конструкции
3. Выбор двигателя и редуктора
3.1 Математическое моделирование
3.2 Выбор двигателя
3.3 Выбор редуктора
4. Проверочный расчет
|
|
|
4.1 Расчет по перегрузке
4.2 Тепловой расчет
5. Результаты
Введение
Плавающие работы могут эффективно проводить мониторинг водной среды, летающие – хорошо подходят для съемок с воздуха каких-либо объектов или мероприятий, колесные – обладают высокой грузоподъемностью и скоростью, но только на ровной поверхности. Каждый из этих типов хорошо подходит для своей задачи, но все они лишены универсальности. Например, колесный робот не может перемещаться по лестнице, летающий не подходит для транспортировки грузов и т. д. Поэтому одной из наиболее важных технологических задач 21-го столетия является разработка такого робота, который мог бы передвигаться, как человек, совершать действия, подобные человеческим, и во всем помогать человеку.
Двуногий роботы востребованы, потому что могут выполнять совершенно разные функции. Например, один и тот же робот может быть военным, пожарным и устранять последствия чрезвычайных ситуаций. Кроме того, что данный робот может заменить человека в опасных для жизни и здоровья процессах, он способен просто работать на производстве, где требуется большая физическая сила, способен помогать детям с особенностями развития, например, аутисты – с ними очень трудно установить контакт родственникам или педагогам, но известно, что такие дети часто интересуются технологичными предметами.
Обзор существующих конструкций
Уже была проделана большая работа в области двуногих шагающих роботов. Остановимся на некоторых системах отдельно.
Компания Boston Dynamics, входящая в состав подразделения Google-Х, занимается разработкой своего двуногого робота Atlas (рис. 3).

Рис. 1. Двуногий робот Atlas
Робот уже неплохо справляется с обязанностями грузчика и улучшил свои навыки в ходьбе по неровной местности и даже по снегу. Также способен самостоятельно подниматься после падения.
Другой интересный представитель двуногих шагающих роботов – это DURUS (рис. 4).
|
|
|

Рис. 2. Двуногий шагающий робот DURUS
DURUS интересен тем, что, благодаря большому количеству степеней свободы, достаточно точно копирует движения человека во время ходьбы, за счет чего процесс ходьбы выглядит очень естественно.
На рисунке 3 представлен южнокорейский двуногий робот «Method-2»

Рис. 3. Двуногий шагающий робот Method-2
Данный робот имеет массу 1300 кг и рост 4.5 м. В его разработку начиная с 2014 года уже вложено 200 млн долларов. Отличие робота в том, что он пилотируемый, то есть в него помещается человек, осуществляющий управление.
Еще один впечатляющий двуногий робот от Boston Dynamics «Handle» представлен на рисунке 4.

Рис. 4. Двуногий робот Handle
Несмотря на то, что на ногах расположены колеса, робот все же относится к двуногим. Такая система может показаться неустойчивой, но на самом деле работ прекрасно держит равновесие, обладает высокой скоростью, и способен перепрыгивать препятствия.
Экземпляры, описанные выше, являются прототипами и в них уже вложены большие средства, поэтому коммерческого выхода они не имеют, то есть закупить партию таких роботов ближайшее время не получится, следовательно, актуальность разработки систем такого класс сохраняется.
Описание конструкции
Схема двуного робота представлена на рисунке 5.

Рис. 5. Схема двуного робота
Стопа 1 соединяется с голенью 2, с помощью двух вращательных кинематических пар. Затем голень соединяется с бедром 3 шарниром (коленный сустав). Тазобедренный сустав также, как и голеностопный имеет 2 вращательные степени свободы и соединяет туловище 4 и бедро 3.
В голеностопном и тазобедренном уставе необходимо не менее двух степеней свободы, так как при медленной ходьбе постоянно необходимо переносить все с одной ноги на другую.
На туловище закреплены камера 8 с двумя степенями свободы и руки, состоящие из плеча 5, предплечья 6 и кисти 7.
Рассмотри отдельно левую ногу робота в рабочем положении с действующими на него силами (рис. 6).
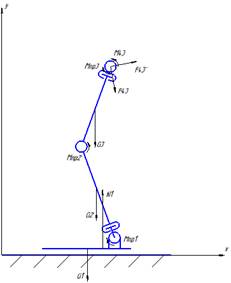
Рис. 6. Схема ноги робота
Рассмотрим привод коленного сустава робота. Для этого перейдем к упрощенной схеме с бедра (рис. 7). Будем считать коленный сустав неподвижно опорой, а совокупность сил тяжести, действующих на верхнюю часть работа, заменим на силу тяжести приведенной массы.
|
|
|

Рис. 7. Упрощенная схема бедра
Опираясь на данную схему, можно построить её модель, на основании которой выбрать двигатель и редуктор.
|
|
|
12 |
