 |


Выбор двигателя и редуктора
|
|
|
|
Необходимо произвести моделирование процесса вертикализации бедра, так как данный процесс расходует наибольшую мощность, следовательно, требуется обеспечить возможность генерирования такой мощности приводом.
Математической моделирование
В данном случае процесс вертикализации будет длится 2 секунды, а затем привод 6 секунд будет стоять, то есть рассматривается повторно кратковременный режим с влиянием пусковых процессов.
Для моделирования воспользуемся пакетом MATLAB/Simulink/SimMechanics и составим схему, представленную на рисунке 8.
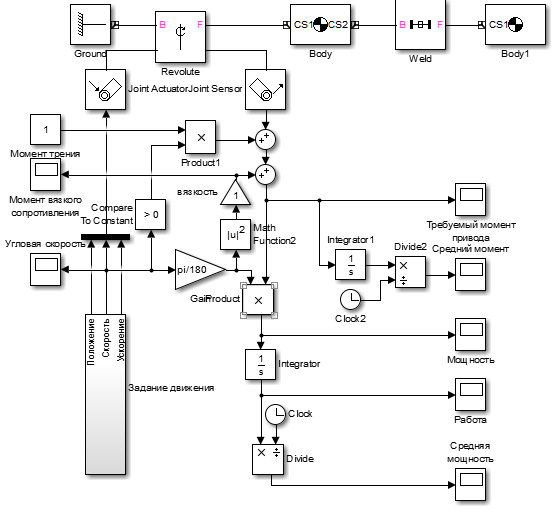
Рис. 8. Схема моделирующая процесс вертикализации бедра
В данной схема блок ground моделирует неподвижную опору (стойку), которая соединяется с бедром (body) с помощью шарнира (revolute). На конце бедра с помощью сварки закреплена приведенная масса (body 1).
Масса бедра равна 10 кг, приведенная масса – 20 кг, а длина бедра составляет 40 см.
Движение задается с помощью блока «Joint Actuator» кинематически, а с помощью блока «Joint Sensor» можно измерить требуемый момент. Также необходимо учесть, что в системе присутствует вязкое и сухой трение, следовательно, момент развиваемы приводом должен быть больше, чем снятый с блока «Joint Sensor».
Проинтегрировав требуемый момент и поделив его на время, узнаем средний требуемый момент (рис. 9).

Рис. 9. График среднего момента
Определим средний момент в момент времени 2 с (рис. 10).

Рис. 10. Увеличенный график среднего момента
Таким образом, для вертикализации бедра за 2 секунды требуется средний момент привода 60.4 Нм.
Выбор двигателя
При определении мощности двигателя необходимо учесть потери на редукторе. Максимальная угловая скорость достигает 15 об/мин, а угловая скорость вращения ротора двигатель примерно 6000 об/мин, следовательно, примерное передаточное отношение редуктора будет равно 400. КПД планетарных редукторов от maxon motors, с таким передаточным отношением равен 0.65. Рассчитаем требуемую мощность двигаетеля.
|
|
|

Из каталога maxon motors был подобран подходящий двигатель с номинальным напряжением 24 В. Характеристики двигателя представлены на рисунке 11.

Рис. 11. Характеристики двигателя RE 40, Graphite Brushes, 150 Watt
Выбор редуктора
Редуктор должен обладать следующими характеристиками:
1. Передаточное отношение около 400.
2. Максимальный выходной момент не менее 112 Нм. (рис. 9).
У maxon motors есть только один подходящий под данные характеристики редуктор (рис. 12)

Рис. 12. Характеристики редуктора Planetary Gearhead GP 81 A
Подобрав двигатель и редуктор перейдем к проверочному расчету.
Проверочный расчет привода
Так как в ходе предыдущих расчетов принимались примерные параметры двигателя и редуктора необходимо произвести проверочный расчет.
Расчет по перегрузке
Ротор двигателя не может вращаться быстрее скорости холостого хода, поэтому необходимо проверить возможность достижения максимальной скорости поворота бедра.
 .
.
Также необходимо, чтобы двигатель мог обеспечить максимальный требуемый момент. Максимальный требуемы момент равен 112 Нм (рис. 9).

Следовательно, момент привод в большей степени ограничивается редуктором. Но так как максимальный выходной момент редуктора (180 Нм) больше чем требуемый, можем считать, что двигатель справится с данное нагрузкой.
Тепловой расчет
Для теплового расчет потребуется знать эквивалентный момент и ток. Добавим к схеме элементы, вычисляющие эквивалентные ток и момент (рис. 13).

Рис. 13. Общая схема с расчетом эквивалентного тока.
В момент времени 2с эквивалентный ток равен 11.85 А (рис. 14).
|
|
|
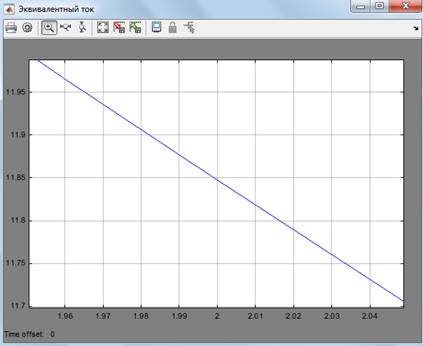
Рис. 14. Эквивалентный ток в момент времени 2с
Эквивалентный ток, умноженный на корень из периода включения, должен быть меньше номинального.

А эквивалентный момент в это же время равен 0.348 (рис. 15)

Рис. 15. Эквивалентный момент в момент времени 2с
Эквивалентный момент, умноженный на корень из периода включения, должен быть меньше номинального.

Таким образом, в результате проверочного расчета удалось убедиться в том, что двигатель и редуктор подобраны верно.
Результаты
1. Было произведено моделирование процесса вертикализации бедра двуногого антропоморфного робота.
2. С учетом результатов моделирования был подобран двигатель и редуктор привода коленного сустава.
3. Был произведен проверочный расчет двигателя.
|
|
|
12 |
