 |


Автоматизация работы катков для уплотнения дорожно-строительных материалов
|
|
|
|
Незаменимыми машинами для уплотнения дорожно-строительных материалов при строительстве дорог и различных площадок являются дорожные катки, автоматизации которых в последнее время уделяется большое внимание.
Современные дорожные катки с гидравлической системой управления для автоматической настройки на оптимальный режим работы оснащаются электронной системой с микропроцессорной техникой. Применение бортового микропроцессора позволяет, в зависимости от требуемой плотности и толщины укатываемого слоя, выбирать и автоматически поддерживать постоянную скорость передвижения катка, а ее изменение производить плавно, равномерно и качественно уплотняя материал. Эта система обеспечивает не только соответствие направления движения машины вращению вала вибровозбудителя, но и автоматический разгон и торможение, а также изменение частоты колебаний в зависимости от плотности укатываемой поверхности, включение и отключение вибровозбудителя при изменении направления движения катка.
Система электронного автоматического управления вибрационным катком состоит из силовой (гидравлической) части и электронного блока управления ЭБУ с операционным усилителем. Силовая часть содержит регулируемые реверсивные аксиально-поршневые насосы, аксиально-поршневые регулируемые и нерегулируемые гидромоторы, насосы систем управления и подпитки, а также редукционные клапаны с пропорциональным электрическим управлением.
Величина электрического сигнала из ЭВУ обеспечивается пропорциональным регулированием насосов ходовой системы и вибровозбудителя. В этом случае задающий сигнал от рычага подачи топлива подается в ЭБУ, усиливается, преобразуется в нем и поступает на управляющие обмотки пропорционального электромагнита редукционного клапана, формирующего требуемое давление в системе управления. При этом поток рабочей жидкости перемещает поршень гидроусилителя насоса и, изменяя угол наклона блока цилиндров, определяет подачу насоса в соответствии с заданным сигналом.
|
|
|
Регулирование подачи насоса в зависимости от нагрузки производится следующим образом. Увеличение нагрузки на движителях вызывает увеличение крутящего момента на валу двигателя, что определяется датчиком скорости. Датчик обратной связи регистрирует снижение частоты вращения вала двигателя и подает сигнал в ЭБУ, из которого сигнал рассогласования поступает в редукционный клапан, формирующий давление в системе управления в соответствии с величиной поступившего сигнала. В связи с этим уменьшается и подача насоса.
При отключении одного из мостов катка в ЭБУ формируется сигнал, подаваемый на пропорциональные электромагниты редукционных клапанов. В результате этого подача насоса уменьшается в два раза, а заданная скорость движения катка сохраняется постоянной.
Вибровозбудитель приводится в работу с помощью объемного гидропривода. При этом для предотвращения образования наплывов грунта и в особенности асфальта при изменении направления движения или при остановке катка происходит автоматическое отключение вибровозбудителей (в связи с уменьшением скорости катка ниже допустимой), а при достижении заданной скорости они вновь включаются в работу.
В системе автоматики используются переключатели выбора частоты вибрации и отключения одного из вибровозбудителей, а также задатчик изменения частоты вибрации, постоянно контролирующий плотность покрытия. При этом требуемая частота вибрации задается независимо от направления и скорости движения машины.
|
|
|
В комбинированных катках задние пневматические колеса приводятся во вращение попарно отдельными гидродвигателями. Это позволяет при движении катка на поворотах осуществлять автоматическую регулировку скорости качения одной пары колес относительно другой.
Во время работы с горячим асфальтом смачивание и охлаждение вальцов выполняется автоматически путем периодического включения насоса для подачи воды под давлением.
В катках на пневматических колесах, при работе с материалами различного вида и состава, требуемыми толщиной уплотнения и плотностью, обеспечивается централизованное автоматическое регулирование давления воздуха в шинах.
Наряду с автоматическим управлением вибровозбудителя и катка возможно их переключение на ручное.
Благодаря использованию в катках чувствительной электронной системы, насосы и гидродвигатели работают в оптимальном режиме, что значительно увеличивает сроких службы.
Автоматизация управления рабочим процессом дорожных катков позволяет оптимизировать этот процесс с учетом физико-механических свойств уплотняемого материала и ведет к повышению производительности и качеству выполняемых работ, снижению времени уплотнения и расхода топлива, а также улучшает условия работы машиниста.
Контроль качества уплотняемых дорожно-строительных материалов делится на контроль прочности, плотности, влажности и толщины покрытия. Эти виды контроля осуществляются различными методами, к которым относятся механический, электронно-механический, электромагнитный, низкочастотный, СВЧ‑метод (сверхвысокие частоты), ультразвуковой и радиоизотопный.
Механический метод или метод отбора проб уплотненного материала сопряжен с необходимостью разрушения дорожного покрытия и с дальнейшим исследованием этих проб в лабораторных условиях. В связи с ограниченным количеством отобранных проб, полученные данные не будут отличаться достаточной достоверностью и не смогут (по истечении затрат времени, требуемых на исследование) повлиять на качество уплотнения уже готовых покрытий. При этом в некоторых случаях, например на покрытиях автомобильных мостов и эстакад, такой отбор проб может привести и к нарушению прочности несущих конструкций.
|
|
|
Электромагнитный, низко- и высокочастотные методы контроля зависят от внешних источников энергии и по своей сложности не всегда удовлетворяют специфическим требованиям, предъявляемым дорожным строительством к таким приборам.
Ультразвуковой метод для работы с дорожно-строительными материалами также не вполне эффективен. Это объясняетсятем, что в средах, обладающих вязкостью, происходит потеря энергии при распространении ультразвуковых волн. При этом величина поглощенияих в грунте и асфальтобетоне довольно значительна. Одновременно к недостаткам следует отнести возможность работы приборов при температуре окружающего воздуха в незначительном диапазоне (от -5 до +35° С).
В практике известны и другие методы непрерывного контроля дорожно-строительных материалов при послойном их уплотнении машинами динамического воздействия. Одним из устройств, устанавливаемых на катках, является динамический индикатор для автоматического контроля качества уплотнения в процессе трамбования или вибрирования.
В катках 1 (рис.216, а) с вибровозбудителем на вибровальце 5 устанавливается вибродатчик 4, сигналы от которого поступают по кабелю 3 в преобразователь и орган сравнения 2, усиливаются и подаются в исполнительные органы. Одновременно данные измерений поступают в постоянное запоминающее устройство и на панель индикации в кабине машиниста. В процессе работы катка на уплотняемой площадке приборы по показаниям вибродатчиков регистрируютизмеряемые характеристики материала.
 Рис.216. Автоматизация контроля качества уплотняемых дорожно-строительных материалов
Рис.216. Автоматизация контроля качества уплотняемых дорожно-строительных материалов
|
При повышении плотности и одновременном увеличении модуля упругости земляного полотна на приборе фиксируются возрастающие показания. В случае устройства полотна из грунта с различными модулями упругости определяется результирующий динами-ческий модуль упругости и регистрируется относительная величина несущей способности основания.
На экране дисплея или индикаторе счетчика высвечиваются цифры средних значений за период измерения от 5 до 30 с. Прибор настраивается на показания, соответствующие требуемой степени плотности, которые устанавливаются после стандартных испытаний. Превышение заданной плотности регистрируется световым или звуковым сигналами, которые оповещают о достижении нормативного уровня укатываемой поверхности.
|
|
|
Каток может комплектоваться дополнительным печатающим устройством для выдачи на бумажную ленту данных за время работы машины.
В трамбующих машинах 5 (рис.216, б) автоматическое устройство включает в себя подобные элементы и состоит из индукционного вибродатчика 2, установленного на трамбующей плите 1, и прибора 4, размещенного в кабине машиниста, регистрирующего сигнал датчика и соединенного с ним кабелем 3. Перед началом работ определяют показания индикатора (тарировку), соответствующие требуемой плотности грунта при заданной толщине слоя. Степень уплотнения при работе машин динамического действия обратно пропорциональна скорости их движения. Поэтому следует стремиться к поддержанию той скорости, которая получена при тарировке.
Использование динамических индикаторов плотности повышает производительность грунтоуплотняющих машин и качество уплотнения грунта.
В связи с тем, что не все указанные методы способны обеспечить контроль всех видов качества уплотненных дорожно-строительных материалов, возникла необходимость в разработке нетрадиционных методов измерений;
Для оперативного неразрушающего контроля грунтовых оснований, бетонных и асфальтобетонных покрытий используют контрольно-измерительные радиометрические приборы. Их работа основана на применении источников γ-излучения, быстрых нейтронов или наих совместном действии. В приборах используются свойства высокой проникающей способности γ-лучей и снижения интенсивностиих излучения при прохождении через исследуемый материал. Поэтому, зная интенсивность излучения, исследуемый материал и заданную толщину уплотняемого слоя, можно, протарировав приборы, определять степень плотности укладываемого материала. Содержание влаги в контролируемом материале определяется по замедлению нейтронного излучения атомами водорода, а содержание связующего в асфальтобетонной смеси— по количеству углеводородных соединений в битуме.
Эти приборы используют как для поверхностного (метод вторичного рассеивания), так и для глубинного (метод просвечивания) измерения параметров уплотняемых материалов.
В настоящее время на строительстве дорог применяют переносные приборы для поверхностного измерения плотности асфальтобетонных покрытий толщиной 2,5...6 см, для поверхностного толщиной 10 см и глубинного толщиной 25см измерения плотности и влажности грунтов и материалов покрытий (рис.217), а также для определения содержания связующего в асфальтобетонных смесях. Эти автономные приборы состоят из встроенного микропроцессора, цифрового дисплея на жидких кристаллах,
|
|
|
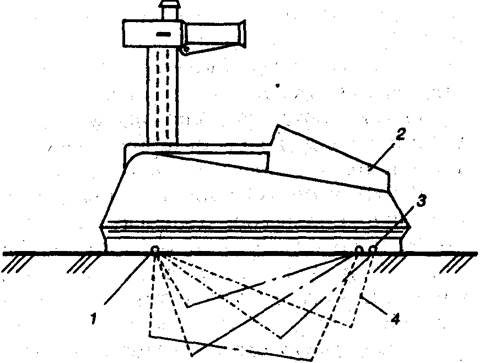 Рис.217. Схема работы прибора оперативного неразрушающего контроля уплотняемых и укладываемых дорожно-строительных материалов: 1— источник; 2 — дисплей; 3 ‑ приемник;: 4 — траектории фотонов
Рис.217. Схема работы прибора оперативного неразрушающего контроля уплотняемых и укладываемых дорожно-строительных материалов: 1— источник; 2 — дисплей; 3 ‑ приемник;: 4 — траектории фотонов
|
переключателя положения зонда с фиксацией через каждые 5 см и кнопки управления для задания требуемых параметров. При работе они переставляются по готовой поверхности.
Навесные приборы подобного типа устанавливаются на дорожных катках и предназначены для непрерывного контроля плотности укладываемого и укатываемого асфальтобетона в процессе работы уплотняющей машины. Такой прибор состоит из корпуса, закрепленного на нижней стороне рамы катка между вальцами. Внутри корпуса в двойных герметизированных капсулах из нержавеющей стали помещен источник излучения, отвечающий требованиям температурного класса и хранения радиоактивных материалов. Дополнительную термическую и механическую изоляцию обеспечивают конструкция и материал корпуса.
Источник излучения и приемное устройство расположены в корпусе прибора таким образом, что γ‑лучи проникают в исследуемый материал, рассеиваются в нем, преломляются и возвращаются к детектору. Отсюда данные непрерывных измерений передаются с помощью соединительного кабеля на бортовой микрокомпьютер, где происходит обработка и сравнение результатов измерений с заданным значением параметров. Индикаторно - регулирующий блок, соединенный с компьютером и установленный на приборной панели кабины перед машинистом, подает информацию на устройство визуального отображения информации — дисплей. На блоке управления катка устанавливаются также цветные сигнальные лампы, а при необходимости может подключаться и звуковая сигнализация.
Степень уплотнения асфальтобетона определяется в течение нескольких секунд в процессе работы катка. Перевод катка на смежную полосу укатки производится только после получения требуемой плотности материала, фиксируемой на дисплее с одновременным включением сигнальной лампы. После перемещения катка на новый участок работы определяется и степень предварительного уплотнения, достигнутая асфальтоукладчиком. Полученные значения плотности асфальта можно ввести в запоминающее устройство и получить результаты измерений в распечатанном виде за любой промежуток времени с указанием участков измерений.
Все приборы надежно защищены от воздействия вибрации, перепада температур и пылевлагонепроницаемы. Изоляция изотопов обеспечивает практически естественный уровень радиации. Доза излучения при работе с приборами не превышают 4% от предельно допустимого значения. Для полной безопасности с помощью быстроразъемных соединений прибор по окончании работы снимается с катка и автоматически переводится в положение транспортировки или хранения, а перед началом смены вновь устанавливается.
К достоинствам радиометрического метода контроля уплотнения дорожно-строительных материалов следует отнести возможность проводить замеры на горячем асфальте и в непосредственной близости от рабочих органов катков, асфальто-, бетоно- и бордюроукладчиков контролировать возрастание степени уплотнения при каждом проходе катка и определять оптимальное число проходов, а также быстро, надежно и с высокой степенью точности производить измерения состояния материалов. Все сказанное необходимо для достижения требуемых параметров дорожных покрытий и оптимального использования катков.
Современное устройство (рис.218), устанавливаемое на катках и обеспечивающее его автоматический режим работы, состоит из трех основных блоков. К ним относятся блок задания условий работы (БЗУР), постоянное запоминающее устройство (ПЗУ) и блок индикации (БИ). БЗУР состоит из набора переключателей, с помощью которых задаются условия работы катка. ПЗУ содержит информацию по специально разработанным программам, устанавливающим взаимосвязь между условиями и режимами работы катка. На блок индикации в цифровой (на дисплее), световой, а при необходимости и звуковой форме поступают данные о работе катка.
Большое внимание в последние годы уделяется автоматизации грузоподъемных машин, таких, как погрузчики, самоходные стреловые и башенные краны. Основным направлением автоматизации этих машин также является управление, безопасность, контроль и диагностика. Однако в связи со спецификой использования главную роль в работе грузоподъемных машин играет их безопасность.
В настоящее время имеется большое количество конструктивных решений ограничителей нагрузки
 Рис.218. Автоматическое устройство установки режима работы катков
Рис.218. Автоматическое устройство установки режима работы катков
|
|
|
|
