Силы, с которыми два тела действуют друг на друга, равны по величине и направлены пр одной прямой в разные стороны.
Лекция 1 Кинематика.
Введение.
Наукой обычно называют попытки систематизировать сумму знаний об ок-ружающем нас материальном мире, о самом человеке и о результатах его деятель-ности. Сам термин «наука» в настоящее время употребляют во множественном числе, подчеркивая многогранность этого понятия. В этом смысле науки раз-деляют на гуманитарные и естественные. Общим для всех наук является обяза-тельное использование формальной логики как универсального метода научного мышления.
Физика как отдельная наука изучает наиболее общие законы формирования и развития окружающей нас материи в ее наиболее примитивных формах, которые принято называть неживой природой. Поэтому можно утверждать, что физика является фундаментом всех естественных наук, в частности географии.
В ХIX и ХХ веках физика пережила бурный расцвет, физические знания и физический метод исследования получили большую известность и нашли при-менения в различных аспектах человеческой деятельности.
Сущность этого метода состоит в том, что в основу критической оценки всех разработанных физических теорий положен эксперимент.
На ранних стадиях развития науки физики свои заключения строили на основе реальных наблюдений различных природных явлений, например, таких как гроза (Б. Франклин и Г.В. Рихман). Позднее человек научился искусственно воспроизводить эти явления в лабораторных условиях – «ставить научные эксперименты». Ясно, что ни одна лаборатория не в силах обеспечить полное воспроизведение всех природных условий наблюдений какого-либо явления. Поэтому для правильной постановки того или иного физического эксперимента необходимо провести правильный анализ изучаемого явления, выделить его наиболее существенные связи с остальным миром. Таким образом изучение явления или объекта всегда проводится в некотором приближении, когда исследователь сознательно или неосознанно отбрасывает некоторые детали воспроизводимого явления. Получив экспериментальные данные, наблюдатель для их объяснения создает на основе имеющихся у него представлений путем синтеза рабочую гипотезу, которая может объяснить не только один, но и целую группу подобных экспериментов. Важно отметить, что осмысление результатов эксперимента идет в некотором упрощенном или, как принято говорить, в модельном представлении, т.е. само явление заменяется его некоторым упрощенным представлением или моделью.
Если разработанные представления оказываются справедливыми для достаточно широкого класса явлений, то принято говорить о возникновении физической теории. Отдельные положения этой теории носят названия физических законов[1], при условии их выполнения для всего класса изученных объектов и явлений.
Важной особенностью физической науки является использование количественных характеристик отдельных свойств физических объектов. Эти характеристики определяются путем измерений, и для установления взаимосвязи между различными физическими параметрами применяется количественная логика, т.е. математика. Математика является мощным средством для аналитического представления физических законов и следствий из них. Любая физическая теория должна быть справедливой для всех явлений природы, в противном случае теория носит лишь частный (ограниченный) характер. Если появляются новые экспериментальные факты, которые не объясняются с точки зрения разработанной теории, то это как раз и указывает на ограниченность теории. В этом случае становится очевидной необходимость построения новой теории, в которой новый экспериментальный материал находит свое естественное объяснение (пример – механика Ньютона и теория относительности Эйнштейна). Здесь важно подчеркнуть тот факт, что критерием оценки справедливости того или иного логического построения выступает эксперимент. Именно он является своеобразным «верховным судьей», выносящим свой «приговор» относительно какой-либо теории.
Однако цепочечная связь «эксперимент – гипотеза – закон – теория – эксперимент» не означает, что физическая теория играет лишь описательную роль, и ее призвание состоит только в объяснении проведенных экспериментов. Союз теории и эксперимента носит творческий характер: атомная теория строения вещества получила всеобщее признание задолго до того, когда стало возможно непосредственное наблюдение отдельных атомов.
Курс общей физики, который будет читаться два семестра, рассчитан на формирование физического мировоззрения, создания естественно-научной базы для правильного понимания всех явлений окружающего нас мира.
Традиционно рассмотрение общей физики начинается с раздела «Меха-ника».
§ 1-1. Основные понятия кинематики.
Механическим движением называется изменение положения предмета относительно заданной системы отсчета. Понятие системы отсчета включает в себя тело отсчета и систему координат. Для большинства задач нашего курса достаточно ограничиться прямоугольной системой координат и выбрать в качестве тела отсчета Землю. Простейшим объектом для изучения механического движения может служить материальная точка[2]. Для описания положения материальной точки
относительно выбранной системы отсчета принято использовать векторное пред-
Y
· ADl
у rА rB · В
х Х
Рис.1.Описание движения точки с помощью радиус-вектора.
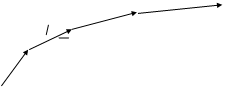
Ставление: положение точки А описывается радиус - вектором rА, проведенным из начала координат в точку А. Если точка А движется, то кривая, соединяющая положения точки в последующие моменты времени t 1, t2...tn (где t1< t2....< tn), называется траекторией движения. При движении точки конец ее радиус-вектора перемещается вдоль траектории. Изменение радиус - вектора с течением времени
называется кинематическим законом движения: r = r (t). Координаты точки в этом случае также являются функциями времени: х = х(t), у = у(t) (см.рис.1) и z = = z(t), которые можно рассматривать как параметрические уравнения движения. Если за время D t точка переместилась из положения А в положение В (см.рис.1),
то радиус - вектор D l, проведенный из А в В, называется перемещением точки за время D t. Из рис. 1 видно, что D l = rB - rA = D r. Для наиболее точного описания движения необходимо выбирать время D t как можно меньше. В этом случае кри-
Ds
D l
Рис.2. Длина пройденного пути.
вая траектории заменяется ломаной линией. Для практических целей важно знать расстояние, пройденное по траектории. Это расстояние принято называть путем S. Очевидно, что длина ломаной линии S D li, будет приближаться к длине пути, если элементарное перемещение D li заменить бесконечно
малым перемещением d li.(S = )
Другой известной характеристикой механического движения точки служит скорость. Средняя скорость < v > за промежуток времени D t определяется как:
. (1- 1)
Ясно, что при таком определении скорости ее значение зависит от выбора величины временного интервала D t и, как следствие, от величины D l. Однако при уменьшении величины D t отношение (1-1) стремится к некоторому пределу, кото-рый принято называть скоростью материальной точки в данный момент времени:
= , (1- 2)
поскольку из рис.1 следует, что D l = D r. Другими словами можно сказать, что скорость является первой производной радиуса-вектора по времени. Важно отметить, что S = , и первая производная пути по времени дает лишь абсолютное значение скорости: = .
Как и любой вектор, вектор скорости можно представить в виде суммы составляющих по координатным осям:
v = , (1-3)
где i, j, k являются единичными векторами, направленными соответственно вдоль осей X,Y и Z. С другой стороны радиус вектор r также можно представить в виде суммы:
r = x i + y j + z k, (1-4)
где x,y и z представляют собой проекции радиуса-вектора на направление соответствующих координатных осей. Дифференцируя формулу (1-4) и сравнивая результат дифференцирования с выражением (1- 3), получим:
vx = = x; vy = = y и vz = = z, (1- 5)
которые означают, что скорости движения проекции точки вдоль координатных осей равны проекциям вектора скорости на соответствующие оси. Из выражения (1-5) следует, что по известной зависимости координат точки от времени (известному закону движения) x(t), y(t) и z (t) простым дифференцированием можно найти проекции vx, vy, vz вектора скорости на координатные оси, а следовательно и сам вектор скорости в любой момент времени. Величина вектора скорости (его модуль) как и величина любого вектора находится как корень квадратный из суммы квадратов соответствующих проекций:
. (1- 6)
Несколько сложнее решается обратная задача - нахождение закона движения по заданной зависимости вектора скорости от времени. Например, если известна зависимость от времени проекции скорости vx (t), то зависимость координаты х от времени x(t) находится путем интегрирования x(t) = + х0, где х0 - координата точки в начальный момент времени (при t = 0). Зависимость от времени других координат находится аналогичным способом.
Кроме того, из формулы (1-3) вытекает, что скорость любого движения можно представить как результат сложения трех прямолинейных движений вдоль координатных осей X,Y и Z,т.е. любое сложное движение можно представить как сумму прямолинейных движений (принцип суперпозиции движений). Примером применения этого принципа может служить вычисление так называемой первой космической скорости, т.е. такой скорости, которою надо сообщить любому телу параллельно земной поверхности, чтобы оно никогда не упало на Землю. В прене-
А vI D t С
RЗ B
RЗ
O
Рис.3. К выводу первой космической скорости.
брежении сопротивлением воздуха задача может быть решена следующим образом. Движение тела, брошенного вдоль земной поверхности можно представить как сумму двух движений: равномерного горизонтального движения со скоростью бросания vI и свободного падения тела к поверхности Земли с ускорением g (ус-корением свободного падения). За достаточно малый промежуток времени Dt тело пройдет, двигаясь перпендикулярно земному радиусу, расстояние АС = vI Dt. (см.рис.3) Если же за это
время, находясь в свободном падении, тело опустится на расстояние ВС так, что ОВ = АО =Rз, то очевидно, что тело сохранит неизменной свою высоту над поверхностью Земли. Из D АОС по теореме Пифагора следует:АО2 + АС2 = ОС2.В то же время АС = vI Dt, АО» RЗ (RЗ - радиус Земли), ОС = ОВ + ВС = + (1/2)g(Dt)2
(предполагается, что время Dt достаточно мало и проекцией скорости vI на направление АО можно пренебречь). Заменяя стороны D АОС на основании приведенных равенств, имеем:
. (1- 7)
После приведения подобных членов и сокращения обеих частей этого уравнения на получим: . При Dt 0 выражение для первой космической скорости приобретает такой вид:
. (1- 8)
Как видно из вывода выражения для первой космической скорости, любое тело, двигаясь вокруг Земли, находится в свободном падении, но уменьшение высоты полета при свободном падении на Землю в точности компенсируется за счет приращения расстояния до Земли при движении по касательной.
Однако случаи, когда тело сохраняет свою скорость неизменной, крайне редки. Наоборот, в общем случае скорость изменяется как по величине, так и по направлению. Для характеристики быстроты изменения скорости вводится понятие ускорения. Ускорением в данный момент времени называется предел отношения приращения скорости к интервалу времени, за который произошло это приращение:
= v = . (1- 9)
Вектор ускорения можно также разложить по координатным осям:
а = а x i + a y j + a z k. (1-10)
Модуль вектора ускорения равен:
. (1- 11)
Прямым дифференцированием аналогично компонентам вектора скорости можно найти, что компоненты вектора ускорения равны:
a x = v x = x; a y = v y = y; a z = v z = z. (1-12)
Если известны зависимость от времени вектора ускорения и начальное значение вектора скорости, то вектор скорости в любой последующий момент времени путем интегрирования. Например, для проекции v x:
и , (1 - 13 )
где v x0 - проекция скорости на ось Х в начальный момент времени. Ранее указывалось, что по известной зависимости v (t) можно найти закон движения. Следовательно, по известному ускорению, зная начальные значения положения точки и ее скорости, можно найти ее закон движения. С точки зрения практики вектор ус-
D
vA BvBDv
A Dvn
E D vt C
Рис.4. Нормальная и тангенциальная
составляющие изменения скорости.
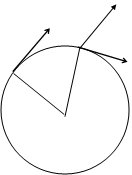
корения удобнее представлять в виде двух составляющих, одна из которых направлена по касательной к траектории, а другая по нормали, проведенной в точку касания. Пусть за время Dt точка переместилась из А в В, и за это время ее скорость изменилась от vA до vB.
Для того, чтобы найти изменение Dv пе-
ренесем вектор vB в точку начала вектора vA. Тогда разность двух векторов vB - vA
может быть представлена в виде вектора Dv = DC. В свою очередь, вектор Dv мо- жно представить тоже как сумму двух составляющих Dv = Dvn + Dvt, где вектор Dvt находится как разность АС-АЕ (АЕ=АD, АС= vB), т.е. как разность модулей векторов vB и vA. Вектор Dvn характеризует изменение направления вектора vA, т.к. vA = АЕ = АD. Треугольник DAE равнобедренный, поэтому при уменьшении интервала времени Dt до нуля (Dt 0) угол DAE также стремится к 0, а ÐАDЕ 900, и Dvn оказывается перпендикулярным направлению скорости. В то же время ясно, что направление вектора Dvt при Dt 0 приближается к направлению касательной в точке А. Поэтому
. (1- 14)
Первое из слагаемых в (1- 14) называют нормальной составляющей ускорения или просто нормальным ускорением, а второе - тангенциальным. Таким образом
, (1- 15)
. (1- 16)
Модуль полного ускорения определяется следующим выражением:
. (1-17)
§ 1 - 2. Кинематика вращательного движения.
vA
vAa Dv
Dl vB
r
a
Рис.5. К выводу центростре-
мительного ускорения
Частным примером нормального ускорения служит центростремительное ускорение, возникающее при равномерном движении точки по окружности. Если за малый промежуток времени Dt точка успевает по-вернуться на угол a, то как видно из рис.5, между перемещением D l, радиусом r, приращением Dv и самой скоростью v можно записать следующее соотношение:
. (1-18)
Из этого соотношения приращение скорости Dv равно: (1-19)
Деля выражение (1-19) для приращения скорости на промежуток времени Dt, имеем: . (1- 20)
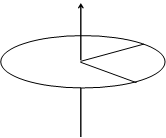
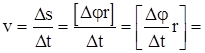
Для случая вращательного движения полезными оказываются такие дополнительные кинематические характеристики как угловая скорость и угловое ускорение. Величина угловой скорости w определяется как отношение угла Dj, который описывает радиус-вектор точки за время Dt, т.е.
. (1-21)
w
v
r
Dj Ds
Рис.6.К определению направ- ления угловой скорости.
При этом угловой скорости приписывается определенное направление, которое определяется следующим образом: направление отсчета угла определяется направлением вращения, а направление w определяется правилом правого буравчика - оно совпадает с движением оси буравчика, когда он вращается в направлении вращения материальной точки (см. рис.6). Вектор углового ускорения b определяется через изменение уг-
ловой скорости вращения за время Dt. При этом направление b совпадает с направлением w, если за время Dt происходит увеличение скорости w и направление b противоположно вектору w, если за время Dt угловая скорость уменьшается. Таким образом
. (1- 22)
При вращательном движении между линейной скоростью точки, направлен-
ной по касательной к окружности вращения существует определенная взаимосвязь. Действительно
[w r ], (1-23)
где квадратные скобки обозначают векторное произведение двух векторов - w и r.
Как известно, два вектора могут быть перемножены двумя способами - скалярно и векторно. Поскольку при скалярном произведении векторов получается число (скаляр), а скорость по определению - вектор, то остается только векторный способ перемножения векторов w и r. Направление векторного произведения так-же определяется по правилу правого буравчика: первый вектор (в нашем случае -это вектор w) вращается по кратчайшему направлению к второму вектору (в нашем случае - это радиус - вектор r); движение оси буравчика при таком вращении покажет направление векторного произведения (см. рис.6).
Лекция 2 Динамика материальной точки.
§ 2-1. Первый закон Ньютона.
Кинематика устанавливает законы движения материальной точки, но не указывает причины вызвавшие это движение, а также факторы, влияющие на вариации кинематических параметров движения. Законы Ньютона, сформулированные более 300 лет назад [3], явились результатом обобщения большого количества наблюдений и экспериментов. Эти законы имеют фундаментальное значение и в наше время. Первый закон утверждает, что существуют такие системы отсчета, в которых всякое тело сохраняет состояние покоя или равномерного прямолинейного движения до тех пор, пока воздействия со стороны других тел не заставят его изменить это состояние. Свойство тела сохранять свое состояние неизменным называют инерцией, а системы отсчета, в которых выполняется этот закон, - инерциальными. Физический смысл закона состоит в том, что для механики нет различия между состоянием покоя и равномерного прямолинейного движения. Он подчеркивает относительность движения. Строго говоря, этот закон является чистой абстракцией, но опыт всего человечества за прошедшие три с лишним века подтверждает его справедливость. Причина изменения состояния тела, т.е. появление ускорения связана с понятием силы. Сила - количественная мера воздействия на выбранное нами тело со стороны других тел. Вообще говоря, это воздействие может быть достаточно сложным, но в этом случае его можно разложить на так называемые простые воздействия. Поэтому силой называют количественную меру простого воздействия на тело со стороны других тел, в во время действия которого тело или его части получают ускорения. Как показывает опыт, величина полученного ускорения зависит от свойств взаимодействующих тел, от расстояния между ними и от их относительных скоростей. Силу принято измерять (в международной системе единиц СИ) в Ньютонах (Н). На территории нашей страны эта система единиц является Государственным Стандартом с 1977 года. Однако до сих пор существуют метрические внесистемные единицы: грамм, килограмм и тонна. Эти единицы используются при определении веса тела.[4] На практике для измерения величины силы используют динамометр - тарированную (градуированную) пружину, снабженную шкалой.
§ 2-2. Второй закон Ньютона.
Опыт показывает, что одна и та же сила сообщает различным телам разные ускорения. Более массивные тела приобретают меньшие ускорения. Для характеристики способности тел противостоять действию силы используется понятие массы. Чем меньше ускорение, которое получает тело, тем больше его масса, т.е. ускорения тел обратно пропорциональны их массам:
. (2-1)
Приняв какую-либо массу за эталон, с помощью этого соотношения можно измерять любую массу.
Величина ускорения, которое получает тело определенной массы, зависит от величины силы, - чем больше сила F, тем больше ускорение (а ~ F), по другому a = k F, где k - коэффициент пропорциональности. С учетом (2-1) имеем:
. (2-2 а)
Выбор коэффициента пропорциональности зависит от выбора системы единиц. В настоящее время во всех существующих системах единиц принято считать k = 1, т.е.
. (2-2 б)
Ускорение - вектор, масса - величина скалярная (число), поэтому сила тоже вектор, направление которого совпадает с направлением ускорения. Если на тело действует несколько сил, то ускорение тела пропорционально их геометрической сумме:
. (2-3)
Уравнение (2-3) представляет одну из форм записи второго закона Ньютона. В механике это уравнение принято называть уравнением движения. Это уравнение - векторное, и его можно заменить тремя скалярными, проектируя поочередно(2-3) на оси координат X, Y и Z. Второй закон Ньютона может быть сформулирован несколько другим способом с помощью понятия импульса тела. Импульсом принято называть величину p = mv, где v - скорость тела. В ньютоновской механике предполагается, что масса тела постоянна и не зависит от скорости, поэтому:
ma = m . (2-4)
С учетом (2-4) уравнение (2-3) принимает такой вид:
. (2-5)
§ 2-3. Третий закон Ньютона.
Понятие силы определено как мера взаимодействия тел, т.е. при рассмотрении движения какого-нибудь тела учитывается только одна сторона этого взаимодействия. Ясно, однако, что все тела надо рассматривать как равноправные, т.е. если второе тело воздействует на первое, то и первое тело воздействует на второе. Третий закон Ньютона устанавливает соотношение между этими воздействиями.
Силы, с которыми два тела действуют друг на друга, равны по величине и направлены пр одной прямой в разные стороны.
Пример: книга лежит на столе; она притягивается к Земле и вследствие этого давит на стол. Однако книга не проваливается к центру Земли, т.к. стол со своей стороны действует на книгу с силой равной по величине силе давления книге на стол. Эта сила со стороны стола носит название реакции опоры. К самой книге приложено две силы: сила притяжения и сила реакции опоры. Они равны по величине и противоположно направлены, т.е. их сумма равна нулю, поэтому книга никуда не двигается.
§ 2-4. Природа механических сил.
Из кинематики известно, что знание величины и направления ускорения позволяет вычислить значения радиуса - вектора материальной точки в любой последующий момент времени, т.е. предсказать [5] положение точки. Законы динамики позволяют сделать это, если известна правая часть уравнений (2-3) или (2-5). Другими словами, нужно уметь определять силы, действующие на тело, положение которого требуется описать. Взаимодействие между макроскопическими телами физика сводит к взаимодействию между элементарными частиц
















 Y
· A D l
у rА rB · В
х Х
Рис.1.Описание движения точки с помощью радиус-вектора.
Y
· A D l
у rА rB · В
х Х
Рис.1.Описание движения точки с помощью радиус-вектора.

 называется кинематическим законом движения: r = r (t). Координаты точки в этом случае также являются функциями времени: х = х(t), у = у(t) (см.рис.1) и z = = z(t), которые можно рассматривать как параметрические уравнения движения. Если за время D t точка переместилась из положения А в положение В (см.рис.1),
называется кинематическим законом движения: r = r (t). Координаты точки в этом случае также являются функциями времени: х = х(t), у = у(t) (см.рис.1) и z = = z(t), которые можно рассматривать как параметрические уравнения движения. Если за время D t точка переместилась из положения А в положение В (см.рис.1),


 то радиус - вектор D l, проведенный из А в В, называется перемещением точки за время D t. Из рис. 1 видно, что D l = rB - rA = D r. Для наиболее точного описания движения необходимо выбирать время D t как можно меньше. В этом случае кри-
то радиус - вектор D l, проведенный из А в В, называется перемещением точки за время D t. Из рис. 1 видно, что D l = rB - rA = D r. Для наиболее точного описания движения необходимо выбирать время D t как можно меньше. В этом случае кри-


 )
)

 . (1- 1)
. (1- 1)


 =
=  , (1- 2)
, (1- 2) поскольку из рис.1 следует, что D l = D r. Другими словами можно сказать, что скорость является первой производной радиуса-вектора по времени. Важно отметить, что S =
поскольку из рис.1 следует, что D l = D r. Другими словами можно сказать, что скорость является первой производной радиуса-вектора по времени. Важно отметить, что S =  , и первая производная пути по времени дает лишь абсолютное значение скорости:
, и первая производная пути по времени дает лишь абсолютное значение скорости:  =
=  .
.

 Как и любой вектор, вектор скорости можно представить в виде суммы составляющих по координатным осям:
Как и любой вектор, вектор скорости можно представить в виде суммы составляющих по координатным осям: v =
v =  , (1-3)
, (1-3)

 где i, j, k являются единичными векторами, направленными соответственно вдоль осей X,Y и Z. С другой стороны радиус вектор r также можно представить в
где i, j, k являются единичными векторами, направленными соответственно вдоль осей X,Y и Z. С другой стороны радиус вектор r также можно представить в r = x i + y j + z k, (1-4)
r = x i + y j + z k, (1-4)

 vx =
vx =  = x; vy =
= x; vy =  = y и vz =
= y и vz =  = z, (1- 5)
= z, (1- 5) . (1- 6)
. (1- 6)  + х0, где х0 - координата точки в начальный момент времени (при t = 0). Зависимость от времени других координат находится аналогичным способом.
+ х0, где х0 - координата точки в начальный момент времени (при t = 0). Зависимость от времени других координат находится аналогичным способом. 


 А vI D t С
А vI D t С
 RЗ B
RЗ
O
Рис.3. К выводу первой космической скорости.
RЗ B
RЗ
O
Рис.3. К выводу первой космической скорости.
 + (1/2)g(Dt)2
+ (1/2)g(Dt)2 . (1- 7)
. (1- 7) После приведения подобных членов и сокращения обеих частей этого уравнения на
После приведения подобных членов и сокращения обеих частей этого уравнения на  получим:
получим:  . При Dt 0 выражение для первой космической скорости приобретает такой вид:
. При Dt 0 выражение для первой космической скорости приобретает такой вид: . (1- 8)
. (1- 8)






 = v =
= v =  . (1- 9)
. (1- 9)


 а = а x i + a y j + a z k. (1-10)
а = а x i + a y j + a z k. (1-10) 
 . (1- 11)
. (1- 11) 






 и
и  , (1 - 13 )
, (1 - 13 )







 D
vA B vB
Dv
A Dvn
E D vt C
Рис.4. Нормальная и тангенциальная
составляющие изменения скорости.
D
vA B vB
Dv
A Dvn
E D vt C
Рис.4. Нормальная и тангенциальная
составляющие изменения скорости.








 может быть представлена в виде вектора Dv = DC. В свою очередь, вектор Dv мо-
может быть представлена в виде вектора Dv = DC. В свою очередь, вектор Dv мо-



 . (1- 14)
. (1- 14) 

 , (1- 15)
, (1- 15) 

 . (1- 16)
. (1- 16) . (1-17)
. (1-17)





 vA
vA a Dv
D l vB
r
a
Рис.5. К выводу центростре-
мительного ускорения
vA
vA a Dv
D l vB
r
a
Рис.5. К выводу центростре-
мительного ускорения
 . (1-18)
. (1-18)
 (1-19)
(1-19)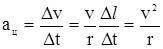 . (1- 20)
. (1- 20)

 . (1-21)
. (1-21) 














 w
v
r
Dj Ds
Рис.6.К определению направ- ления угловой скорости.
w
v
r
Dj Ds
Рис.6.К определению направ- ления угловой скорости.


 . (1- 22)
. (1- 22) 







 [w r ], (1-23)
[w r ], (1-23) 
 где квадратные скобки обозначают векторное произведение двух векторов - w и r.
где квадратные скобки обозначают векторное произведение двух векторов - w и r.
 Как известно, два вектора могут быть перемножены двумя способами - скалярно и векторно. Поскольку при скалярном произведении векторов получается число (скаляр), а скорость по определению - вектор, то остается только векторный
Как известно, два вектора могут быть перемножены двумя способами - скалярно и векторно. Поскольку при скалярном произведении векторов получается число (скаляр), а скорость по определению - вектор, то остается только векторный . (2-1)
. (2-1) . (2-2 а)
. (2-2 а) . (2-2 б)
. (2-2 б) Ускорение - вектор, масса - величина скалярная (число), поэтому сила тоже вектор, направление которого совпадает с направлением ускорения. Если на тело действует несколько сил, то ускорение тела пропорционально их геометрической сумме:
Ускорение - вектор, масса - величина скалярная (число), поэтому сила тоже вектор, направление которого совпадает с направлением ускорения. Если на тело действует несколько сил, то ускорение тела пропорционально их геометрической сумме:
 . (2-3)
. (2-3)
 Уравнение (2-3) представляет одну из форм записи второго закона Ньютона. В механике это уравнение принято называть уравнением движения. Это уравнение - векторное, и его можно заменить тремя скалярными, проектируя поочередно(2-3) на оси координат X, Y и Z. Второй закон Ньютона может быть сформулирован несколько другим способом с помощью понятия импульса тела. Импульсом принято называть величину p = mv, где v - скорость тела. В ньютоновской механике предполагается, что масса тела постоянна и не зависит от скорости, поэтому:
Уравнение (2-3) представляет одну из форм записи второго закона Ньютона. В механике это уравнение принято называть уравнением движения. Это уравнение - векторное, и его можно заменить тремя скалярными, проектируя поочередно(2-3) на оси координат X, Y и Z. Второй закон Ньютона может быть сформулирован несколько другим способом с помощью понятия импульса тела. Импульсом принято называть величину p = mv, где v - скорость тела. В ньютоновской механике предполагается, что масса тела постоянна и не зависит от скорости, поэтому:


 ma = m
ma = m  . (2-4)
. (2-4)

 . (2-5)
. (2-5)