Твердое тело можно рассматривать как систему материальных точек, жестко скрепленных друг с другом. Отсутствие такого закрепления существенно затруднило бы описание движения всего конгломерата точек. Для полного описания движения одной точки необходимо знать ее три координаты, поэтому для N точек число необходимых координат, а следовательно, и число уравнений для их определения составило бы 3N. Так как число N может быть как угодно большим, то возможности строгого решения системы из 3N уравнений весьма ограничены. Кроме того характер движения тела как целого может быть различным. Обычно различают поступательное, вращательное и плоское движения. При поступательном движении все точки тела движутся по параллельным траекториям, так что для описания движения тела в целом достаточно знать закон движения одной точки. В частности, такой точкой может служить центр масс твердого тела. В этом случае задача описания движения тела решается с помощью теоремы о движении центра масс. При вращательном движении все точки тела описывают концентрические окружности, центры которых лежат на одной оси. Скорости точек на любой из окружностей связаны с радиусами этих окружностей и угловой скоростью вращения: vi = [w ri ]. Так как твердое тело при вращении сохраняет свою форму, радиусы вращения остаются постоянными и
= [ bri]. (4-1)
§ 4-2. Определение момента силы.
Для описания динамики вращательного движения твердого тела необходимо ввести понятие момента силы. При этом надо различать понятия момента силы
M
O f
r a
A
Рис.11. Момент силы от-
носительно точки.
относительно точки и относительно оси. Если сила f приложена к материальной точке А(см. рис.11),то моментом силы М относительно произвольной точки О называется векторное произведение радиуса-вектора r, проведенного из точки О к точке А, и вектора силы:
М = [ r f ]. (4-2)
Модуль векторного произведения = r f sin a, а на-
правление вектора М определяется правилом правого буравчика: направление первого вектора r по кратчай-
шему пути вращается к направлению второго вектора f, а движение оси буравчика
z Mz
f
f
O f
r a
А
Рис.12. Момент силы от- носительно оси.
при этом вращении показывает направление вектора М.
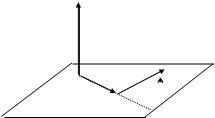
Моментом силы относительно произвольной оси z называется векторное произведение радиуса-вектора r
и составляющей f силы f, приложенной в точке А:
М = [ r f ], (4-3)
где составляющая f представляет собой проекцию си- лы f на плоскость, перпендикулярную оси z и проходящую через точку А, а r - радиус- вектор точки А, ле-
жащий в этой плоскости.
§ 4-3. Основное уравнение динамики вращательного движения.
О1
ri
mi
О2
Рис.13 Вращение
твердого тела.
Пусть имеется твердое тело произвольной формы (см. рис 13), которое может вращаться вокруг оси О1О2. Разбивая тело на малые элементы, можно заметить, что все они вращаются вокруг оси О1О2 в плоскостях, перпендикулярных оси вращения с одинаковой угловой скоростью w. Движение каждого из отдельных элементов малой массы m описывается вторым законом Ньютона. Для i -го элемента имеем:
mi ai = fi1+ fi2 +..... +fiN + Fi, (4-4)
где fik (k = 1,2,...N) представляют собой внутренние силы взаимодействия всех элементов с выбранным, а Fi - равнодействующая всех внешних сил, действующих на i - элемент. Скорость vi каждого элемента вообще говоря может меняться как угодно, но поскольку тело является твердым, то смещения точек в направлении радиусов вращения можно не рассматривать. Поэтому спроектируем уравнение (4-4) на направление касательной и умножим обе части уравнения на ri:
В правой части получившегося уравнения произведения типа ri(fi1)t представляют собой (согласно (4-3)) моменты внутренних сил относительно оси вращения, т.к. ri и (f i)t взаимно перпендикулярны. Аналогично произведения ri(Fi)t являются моментами внешних сил, действующих на i-элемент. Просуммируем уравнения дви-
1 O1
(f12)
f12 r1
g
l12
f21l21
(f21) b. 2 r2
O2 Рис.14. Компенсация моментов внут- ренних сил.
жения по всем элементам, на которые было разбито тело.
Сумму моментов внутренних сил можно разбить по парам слагаемых, обязанных своим возникновением взаимодействию двух элементов тела между собой. На рис.14 пред- ставлена пара, состоящая из 1-го и 2-го элементов. Проводя плоскость через линию, соединяющую эти элементы, параллельно оси вращения О1О2, нетрудно заметить, что моменты сил взаимодействия этих элементов равны по величине и противоположно направлены, т.е. они компенсируют друг друга. Действительно, силы f12 и f21 равны между собой; равны и их составляющие (f12) = (f21). Кроме того равны и их плечи [8](l12= l21), т. к. каждое из них перпендикулярно проведенной плоскости. Поэтому момен-
ты сил М1 = (f12) r1sin(900 - g) = (f12) l12 и M2 = (f21) r2 sin(900 - b) = (f21) l21 равны и противоположно направлены. На основании этого можно сделать вывод, что при сложении всех моментов внутренних сил они попарно уничтожатся. Суммарный момент всех внешних сил обозначим S Мi, где Mi = [ ri Fi].
Левая часть уравнения (4-4а) с учетом (3 -7) представится в таком виде:
= = , (4-5)
где величину принято называть моментом инерции твердого тела относительно заданной оси. Эта величина характеризует распределение массы тела относительно определенной оси. Как следует из определения момента инерции - это величина аддитивная. Момент инерции тела складывается из моментов инерции его отдельных элементов, которые можно рассматривать как материальные точки, т.е.
I = , где ji = mi - момент инерции материальной точки.
При практическом вычислении моментов инерции вместо суммирования используется интегрирование (суммирование бесконечно малых величин). Если ось, относительно которой вычисляется момент инерции, проходит через центр симметрии тела, то вычисление такого интеграла представляет сравнительно несложную задачу, но в общем случае задачу решить трудно. Для упрощения вычислений полезной оказывается теорема о параллельном переносе осей инерции (теорема Гюйгенса - Штейнера), формулировка которой гласит, что момент инерции относительно любой оси равен сумме момента инерции относительно параллельной оси, проходящей через центр масс, и произведения массы тела на квадрат расстояния между осями, т.е.
Iпроиз = Iцм + m d 2. (4-6)
Для некоторых тел правильной формы значение моментов инерции относительно осей, проходящих через центр их симметрии приведены в таблице 2.
Таблица 2.
Форма тела Расположение Величина
оси момента
инерции
Обруч m R2Цилиндр
Шар
Примечание: m- масса тела, R - его радиус
На основании изложенного уравне-ние (4-4а) с учетом (4-5) приводится к виду:
, (4-7)
которое называется уравнением динамики вращательного движения твердого тела или уравнением моментов. Дело в том, что левую часть этого уравнения можно представить по другому, т.к. по аналогии с правой частью величину
[riaimi]=[ =
называют изменением момента импульса (радиус ri внесен под знак дифференцирования, т.к. все точки вращаются по окружностям постоянного радиуса). Если
обозначить [ ri mi vi] = [ri pi] = Li, a cyмму = L, то уравнение (4-7) можно за-
писать так: . (4-8)
L
O mv
r a
A
Рис.15.Момент импуль- са материальной точки.
Рис.15 поясняет определение момента импульса точечной массы относительно точки О, который вычисляется также как момент силы [ ri mi vi] = [ri pi] = Li. Направление момента импульса определяется правилом правого буравчика - вектор r вращается по кратчайшему пути к вектору mv, а направление движения оси буравчика указывает направление вектора L. Момент импульса относительно оси также определяется аналогично моменту силы относительно оси:
L = [ r p ], (4-9) где значения r и р соответствуют обозначениям рис.12 (с заменой f на р). Для вращательного движения точки L = [r mv] = [r mwr] = w mr 2 = w Ii. Для твердого тела L = wI. (4-10)
§ 4-4. Закон сохранения момента импульса.
Если правая часть уравнения (4-8) оказывается по каким - либо равной нулю - суммарный момент сил равен нулю, то и L = const. Это случается, если система замкнута, т.е. внешние силы вообще не действуют, или если моменты внешних сил компенсируют друг друга. Наконец, если внешние силы оказываются центральными - линии действия всех сил пересекаются в одной точке. Весьма интересным представляется случай, когда механический момент импульса при вращении тела имеет достаточно большую величину (по сравнению с моментом внешних сил). Наиболее ярким примером этого служит гироскоп (см. рис 16).
L1
dj
M L2dL
mg
Рис. 16 Прецессия гиро- скопа.
Гироскопом принято называть достаточно массивное тело, быстро вращающееся вокруг оси симметрии. Гироскоп закрепляют в одной точке с помощью специального устройства - карданова подвеса. Если на гироскоп действуют внешние силы (груз mg на рис.),
то ось гироскопа начинает смещаться под воздействием момента силы (см. (4-8)), т.е. изменение момента импульса совпадает с направление М. За малый промежуток времени dt ось гироскопа повернет-
ся на угол dj так, что изменение момента импульса dL = L1 - L2 = Ldj. В то же время из уравнения (4-8) следует dL = M dt, или Ldj = M dt, откуда можно придти к выводу, что гироскоп начинает вращаться в плоскости, перпендикулярной плоскости рисунка с частотой, которая называется частотой прецессии.
. (4-11)
Если моменты внешних сил малы по сравнению с моментом импульса вращающегося тела, то частота прецессии мала, и тело сохраняет ориентацию оси вращения в пространстве (пример - жонглирование предметами в цирке).
[1] В отличие от юридических законов, предписывающих те или иные правила поведения, физические законы носят описательный характер и отражают реальные соотношения между различными явлениями природы.
[2] Материальной точкой можно считать любой объект, если его геометрические размеры малы по сравнению с характеристическими расстояниями конкретной задачи.
[3] Трактат И. Ньютона «Математические начала натуральной философии» был опубликован в 1687 г.
[4] Вес тела - это сила, с которой тело давит на подставку или растягивает нить подвеса. В быту силу в Ньютонах измерять не принято.
[5] Это не имеет ничего общего с так называемыми «предсказаниями» оккультных «наук».
[6] Положительное направление оси координат удобно направить вниз.
[7] Для упрощения изложения материала силы трения качения не рассматриваются.
[8] Плечом силы называют величину r sina (cм. выражение (4-2) и обозначения рис.11.). Оно является перпендикуляром, опущенным на линию действия силы.





 Твердое тело можно рассматривать как систему материальных точек, жестко скрепленных друг с другом. Отсутствие такого закрепления существенно затруднило бы описание движения всего конгломерата точек. Для полного описания движения одной точки необходимо знать ее три координаты, поэтому для N точек число необходимых координат, а следовательно, и число уравнений для их определения составило бы 3N. Так как число N может быть как угодно большим, то возможности строгого решения системы из 3N уравнений весьма ограничены.
Твердое тело можно рассматривать как систему материальных точек, жестко скрепленных друг с другом. Отсутствие такого закрепления существенно затруднило бы описание движения всего конгломерата точек. Для полного описания движения одной точки необходимо знать ее три координаты, поэтому для N точек число необходимых координат, а следовательно, и число уравнений для их определения составило бы 3N. Так как число N может быть как угодно большим, то возможности строгого решения системы из 3N уравнений весьма ограничены.





 = [ bri]. (4-1)
= [ bri]. (4-1)



 = r f sin a, а на-
правление вектора М определяется правилом правого буравчика: направление первого вектора r по кратчай-
= r f sin a, а на-
правление вектора М определяется правилом правого буравчика: направление первого вектора r по кратчай-

























 z Mz
f
f
O f
r a
А
Рис.12. Момент силы от- носительно оси.
z Mz
f
f
O f
r a
А
Рис.12. Момент силы от- носительно оси.











 О1
ri
mi
О2
Рис.13 Вращение
твердого тела.
О1
ri
mi
О2
Рис.13 Вращение
твердого тела.
 fi1+ fi2 +..... +fiN + Fi, (4-4)
fi1+ fi2 +..... +fiN + Fi, (4-4)

 где fik (k = 1,2,...N) представляют собой внутренние силы взаимодействия всех элементов с выбранным, а Fi - равнодействующая всех внешних сил, действующих на i - элемент. Скорость vi каждого элемента вообще говоря может меняться как угодно, но поскольку тело является твердым, то смещения точек в направлении радиусов вращения можно не рассматривать. Поэтому спроектируем уравнение (4-4) на направление касательной и умножим обе части уравнения на ri:
где fik (k = 1,2,...N) представляют собой внутренние силы взаимодействия всех элементов с выбранным, а Fi - равнодействующая всех внешних сил, действующих на i - элемент. Скорость vi каждого элемента вообще говоря может меняться как угодно, но поскольку тело является твердым, то смещения точек в направлении радиусов вращения можно не рассматривать. Поэтому спроектируем уравнение (4-4) на направление касательной и умножим обе части уравнения на ri: ri(fi1)t + ri(fi2)t +..... +ri(fiN)t + ri(Fi)t. (4-4a)
ri(fi1)t + ri(fi2)t +..... +ri(fiN)t + ri(Fi)t. (4-4a)

























 1 O1
(f12)
f12 r1
g
l 12
f21
l 21
(f21) b. 2 r2
O2 Рис.14. Компенсация моментов внут- ренних сил.
1 O1
(f12)
f12 r1
g
l 12
f21
l 21
(f21) b. 2 r2
O2 Рис.14. Компенсация моментов внут- ренних сил.







 ты сил М1 = (f12) r1sin(900 - g) = (f12) l 12 и M2 = (f21) r2 sin(900 - b) = (f21) l 21 равны и противоположно направлены. На основании этого можно сделать вывод, что при сложении всех моментов внутренних сил они попарно уничтожатся. Суммарный момент всех внешних сил обозначим S Мi, где Mi = [ ri Fi].
ты сил М1 = (f12) r1sin(900 - g) = (f12) l 12 и M2 = (f21) r2 sin(900 - b) = (f21) l 21 равны и противоположно направлены. На основании этого можно сделать вывод, что при сложении всех моментов внутренних сил они попарно уничтожатся. Суммарный момент всех внешних сил обозначим S Мi, где Mi = [ ri Fi]. =
=  =
=  , (4-5)
, (4-5) принято называть моментом инерции твердого тела относительно заданной оси. Эта величина характеризует распределение массы тела относительно определенной оси. Как следует из определения момента инерции - это величина аддитивная. Момент инерции тела складывается из моментов инерции его отдельных элементов, которые можно рассматривать как материальные точки, т.е.
принято называть моментом инерции твердого тела относительно заданной оси. Эта величина характеризует распределение массы тела относительно определенной оси. Как следует из определения момента инерции - это величина аддитивная. Момент инерции тела складывается из моментов инерции его отдельных элементов, которые можно рассматривать как материальные точки, т.е. , где ji = mi
, где ji = mi  - момент инерции материальной точки.
- момент инерции материальной точки.

 Таблица 2.
Таблица 2. 























 Форма тела Расположение Величина
оси момента
инерции
Обруч m R2
Цилиндр
Форма тела Расположение Величина
оси момента
инерции
Обруч m R2
Цилиндр  Шар
Шар  Примечание: m- масса тела, R - его радиус
Примечание: m- масса тела, R - его радиус
 , (4-7)
которое называется уравнением динамики вращательного движения твердого тела или уравнением моментов. Дело в том, что левую часть этого уравнения можно представить по другому, т.к. по аналогии с правой частью величину
[riaimi]=[
, (4-7)
которое называется уравнением динамики вращательного движения твердого тела или уравнением моментов. Дело в том, что левую часть этого уравнения можно представить по другому, т.к. по аналогии с правой частью величину
[riaimi]=[  =
= 






 обозначить [ ri mi vi] = [ri pi] = Li, a cyмму
обозначить [ ri mi vi] = [ri pi] = Li, a cyмму  = L, то уравнение (4-7) можно за-
= L, то уравнение (4-7) можно за-
 писать так:
писать так:  . (4-8)
. (4-8)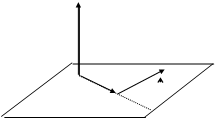













 L = [ r p ], (4-9)
L = [ r p ], (4-9)
 Если правая часть уравнения (4-8) оказывается по каким - либо равной нулю - суммарный момент сил равен нулю, то
Если правая часть уравнения (4-8) оказывается по каким - либо равной нулю - суммарный момент сил равен нулю, то  и L = const. Это случается, если система замкнута, т.е. внешние силы вообще не действуют, или если моменты внешних сил компенсируют друг друга. Наконец, если внешние силы оказываются центральными - линии действия всех сил пересекаются в одной точке. Весьма интересным представляется случай, когда механический момент импульса при вращении тела имеет достаточно большую величину (по сравнению с моментом внешних сил). Наиболее ярким примером этого служит гироскоп (см. рис 16).
и L = const. Это случается, если система замкнута, т.е. внешние силы вообще не действуют, или если моменты внешних сил компенсируют друг друга. Наконец, если внешние силы оказываются центральными - линии действия всех сил пересекаются в одной точке. Весьма интересным представляется случай, когда механический момент импульса при вращении тела имеет достаточно большую величину (по сравнению с моментом внешних сил). Наиболее ярким примером этого служит гироскоп (см. рис 16).




 . (4-11)
. (4-11)