 |


Характеристики измерительных приборов
|
|
|
|
- уравнение преобразования (градуировочная характеристика);
- чувствительность  ;
;
- порог чувствительности;
- диапазон измерений;
- область рабочих частот;
- статические и динамические погрешности;
- собственная мощность потребления;
- быстродействие;
- надежность;
- экономичность.
Технические средства измерений
Измерительный преобразователь – это устройство преобразования измерительной информации в форму удобную для передачи, обработки и хранения, но неподдающейся восприятию наблюдателя.
Лекция №2
Датчики физических величин
1. Последовательное включение датчиков

2. Дифференциальное (параллельное) включение датчиков

Помеха Q при таком включении датчиков компенсируется и не влияет на выход.
3. Компенсационное включение (датчик с обратной связью)
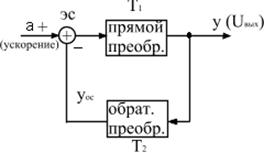

Акселерометр. Ускорение приводит в движение массу, которое измеряется дифференциальным конденсатором, усиливается и в виде тока подается в катушку, которая противодействует смещению. Чем больше k, тем меньше будет смещение. Далее ток преобразуется в UВЫХ, как падение напряжения на R.
Классификация датчиков
- аналоговые: параметрические (- L, -R, -C);
генераторные (ТП, датчики Холла, ТГ и т.д.);
- цифровые;
- частотные.
Аналоговые датчики имеют бесконечное множество значений выходного электрические сигнала. Они подвержены влиянию окружающей среды и помех, но не точные.
Параметрические датчики под воздействием физической величины изменяют какой либо свой параметр (R, L, C). Им для формирования выходного сигнала необходим источник питания.
Генераторные датчики сами вырабатывают электрические сигналы (например, термопара).
|
|
|
Цифровые датчики имеют конечное значение уровней сигнала, количество которых определяется разрядностью, а также Они высокую точность и помехоустойчивость при большем количестве разрядов, но сложны в реализации.
Частотные датчики имеют выходной сигнал в виде гармонических колебаний с параметрами (частота, период, сдвиг фазы). Имеют высокую точность и помехозащищенность.
Метрологические характеристики датчика
1. Х - входная величина.
2. У - выходная величина.
3. Функция преобразования, которая может быть задана:
- аналитически в виде функции y = f(x);
- в виде графика;
- в виде таблицы.
4. Чувствительность: S = Δy, если размерности входа и выхода разные, или коэффициент усиления, если размерности равные.
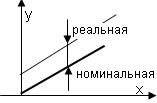
5. Номинальная характеристика - усредненная характеристика. Реальная характеристика отличается от номинальной на величину равную погрешности.
6.

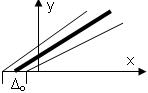
7. Порог чувствительности Δо – минимальное изменение входного сигнала, вызывающее минимальное изменение выходного сигнала.
7. Диапазон измерения 0  ХН – область значений измеряемой величины, для которой нормированы допустимые погрешности.
ХН – область значений измеряемой величины, для которой нормированы допустимые погрешности.
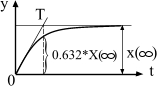
8. Быстродействие – время, которое затрачивается на измерение и может выражаться через постоянную времени Т ( ). Постоянная времени Т есть условное время изменения выходной величины от начального значения до вновь установившегося значения, если бы это изменение происходило с максимальной постоянной скоростью.
). Постоянная времени Т есть условное время изменения выходной величины от начального значения до вновь установившегося значения, если бы это изменение происходило с максимальной постоянной скоростью.
9. Абсолютная (смешанная) погрешность: Δ = Х – А.
10. Δ = У-Уном - абсолютная погрешность по выходу
У – реальное значение сигнала;
Уном - номинальное значение сигнала.
11. δ = Δ / У относительная погрешность по выходу.
12. γ= Δ / Уmax-Уmin приведенная погрешность по выходу.
Требования к датчикам
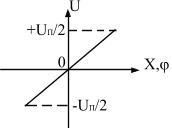
1. Однозначность и линейность характеристики (отсутствие гистерезиса).
|
|
|
2. Минимальное влияние внешних факторов.
3. Высокая чувствительность.
4. Высокое быстродействие
5. Стабильность характеристик во времени.
6. Простота и технологичность конструкции.
7. Взаимозаменяемость.
8. Удобство монтажа и обслуживания.
Лекция №3
Резистивные датчики
Различают: контактные, реостатные, электролитические (тензолиты),
тензодатчики.
Контактный датчик:


Входная величина Х – перемещение.
Выходная величина R – сопротивление.


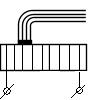
На каркас наматывается высокоомная проволока (нихром, константан, манганин, фехраль).
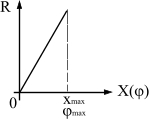
Входная величина Х – угловое или линейное перемещение.
Выходная величина R – сопротивление.
Если не проволочное сопротивление, то используют резистивную полоску и скользящий контакт.

Схемы включения:
- реостатное включение;


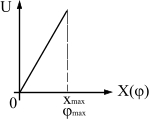
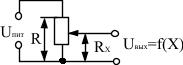
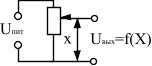
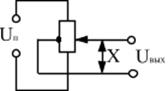
- потенциометрическое включение;
 а)
а)

X- линейное перемещение;
φ- угловое перемещение.
Чувствительность
При реостатном включении чувствительность определяется сопротивлением. Чем больше R, тем больше чувствительность.
При потенциометрическом включении выходная величина определяется величиной питающего напряжения.
Порог чувствительности определяется диаметром провода.
Погрешность характеристики зависит от равномерности шага намотки,необходимого натяжения провода, строения геометрического каркаса.
Погрешность от влияния нагрузки:
1)
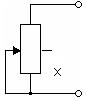
Уменьшить погрешность можно увеличением сопротивление нагрузки, либо ограничением перемещения движка, либо заменой части сопротивления переменного резистора постоянным сопротивлением, как показано на рис. 1.
 2)
2)
Рис. 1 Вариант включения делителя

Погрешность температурная.
Необходимо использовать материалы с низким температурным коэффициентом сопротивления (манганин), или использовать терморезистор, который будет учитывать влияние температуры.
Другие схемы включения:



 Два кольцевых реостата
Два кольцевых реостата
соединяются параллельно,
два движка.
Так же есть функциональные датчики с нелинейной характеристикой:


Из линейного датчика тоже можно сделать функциональный датчик.
|
|
|
Тензорезисторы
Тензорезисторы бывают: проволочные, фольговые, пленочные, жидкостные и полупроводниковые.
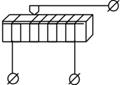
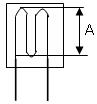
Проволочный тензорезистор - тонкая высокоомная проволока уложена в виде решетки и заклеена между двумя слоями тонкой бумагой. Выводы - мягкая медная проволока. Диаметр высокоомной проволоки: (0.02 – 0.05) мм. Материал- высокоомные сплавы (константан, манганин, нихром). А – база от 5 до 30 мм. Сопротивление тензодатчика R = (50, 100, 200, 400, 800) Ом.
Фольговый тензодатчик выполняется фотохимическим методом травления фольги из высокоомного материала.
Пленочный тензодатчик изготавливаются напылением высокоомного материала (кремния) на сапфировую подложку, обладающую упругостью и высоким удельным сопротивлением.
Тензодатчики используют для измерения механических деформаций.
Выходной величиной тензодатчика является изменение сопротивления
 ,
,
где  – удельное сопротивления материала проволоки;
– удельное сопротивления материала проволоки;
S – площадь поперечного сечения проволоки, мм  ;
;
ℓ - длина проволоки, м



 - коэффициент Пуассона
- коэффициент Пуассона

Продольная чувствительность S1 ≈ 2.
Для измерения деформации тензодатчик наклеивается по специальной технологии на поверхность вдоль направления действия силы.

1. Погрешность градуировки.
2. Погрешность от поперечной тензочувствительности у проволочных тензорезисторов составляет 0.5%, а у фольговых - отсутствует.
3. Температурная погрешность определяется зависимостью сопротивления проволоки от температуры. При изменении температуры датчик и деталь деформируются независимо друг от друга за счет разных коэффициентов расширения материалов.
4. Ползучесть.
Лекция №4
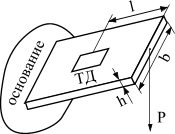
Градуировка тензодатчиков

 |
s = M/W
M = P·ℓ
|
|



P – сила;
s – механическое напряжение;
М – изгибающий момент;
W – момент сопротивления.
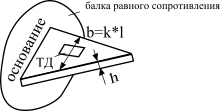
Ползучесть – это не 100% передача деформации на датчик из-за некачественной приклейки тензодатчика на деталь.
Устранить погрешность от места установки датчика можно, если использовать балку равного сопротивления, где механическое напряжение везде одинаково.
|
|
|

|


Схемы включения тензодатчиков
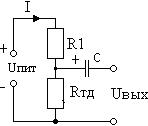
1. Делитель U.
Тензодатчик необходимо подключать к источнику тока, внутреннее сопротивление которого равно бесконечности. Учитывая, что батарея (источник питания) есть источник ЭДС (внутреннее сопротивление которого равно нулю), то последовательно с батареей включен резистор R1, сопротивление которого много больше, чем сопротивление тензодатчика (R1>>Rтд).

2. Мостовая схема.
 Если R3/R1= R4/R2, то Uвых = 0, т.е.
Если R3/R1= R4/R2, то Uвых = 0, т.е.
мост сбалансирован.
 Если в одно из плеч моста включить тензодатчик, то напряжение Uвых моста будет зависеть от изменения Rтд.
Если в одно из плеч моста включить тензодатчик, то напряжение Uвых моста будет зависеть от изменения Rтд.

Чтобы устранить температурную (аддитивную) погрешность используют схемы компенсации.
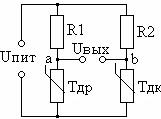
 P
P  – тензодатчик рабочий;
– тензодатчик рабочий;



 – тензодатчик компенсатор, который располагается
– тензодатчик компенсатор, который располагается
перпендикулярно направлению силы Р.

 |
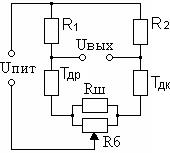
При изменении температуры Rтдр и Rтдк изменяются одинаково, напряжение в точках a и b меняется синфазно. Питание моста может быть постоянным или переменным. Для практических целей необходима балансировка моста.
а) При питании моста постоянным напряжением необходимо выполнить неравенство Rш < Rб. Изменяя положение движка можно балансировать мост.


|




Кроме измерения механического напряжения и деформаций в реальных конструкциях и деталях, ТД применяются в качестве датчиков веса(массы), крутящего и изгибающего момента, давления газа или жидкости, перемещения, ускорения, силы, уровня и т.д.
Пример. Крутящий момент можно определить путем измерения механического напряжения в материале вала, наклеенных, как показано на рис.

Крутящий момент
 ,
,
где  - измеренное механическое напряжение;
- измеренное механическое напряжение;
 - полярный момент сопротивления сплошного круглого вала.
- полярный момент сопротивления сплошного круглого вала.
При включении преобразователей в два соседних плеча моста влияние деформации изгиба вала на результат измерения исключается, поскольку при изгибе деформации обоих преобразователей одинаковы по величине и по знаку.
Индуктивный датчик
|




 якорь
якорь
воздушный зазор

неподвижная часть
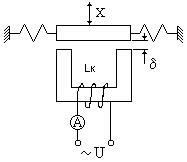
Физика работы индуктивного датчика.
При протекании тока через катушку в магнитной системе с разрывом в виде клапана возникает пульсирующий магнитный поток, величина которого зависит от положения клапана. Под действием силы Р клапан опускается вниз, магнитное сопротивление магнитному потока уменьшается, что вызывает увеличение ЭДС самоиндукции в катушке датчика. Согласно второму закону Кирхгофа при постоянстве питающего напряжения новое равновесие наступит при меньшем токе через катушку.
|
|
|
Ток через катушку согласно закону Ома для переменного тока равен

Входной величиной датчика является перемещение клапана.
Выходной величиной – может быть ток в катушке (линейный датчик) или индуктивность катушки (нелинейный датчик).
Другие конструкции:
1.



 В зазор магнитопровода вдвигается ферромагнитный сердечник, что уменьшает магнитное сопротивление пульсирующему магнитному потоку. Физика работы датчика аналогична предыдущему.
В зазор магнитопровода вдвигается ферромагнитный сердечник, что уменьшает магнитное сопротивление пульсирующему магнитному потоку. Физика работы датчика аналогична предыдущему.
2. Индуктивный датчик плунжерного типа. Индуктивное сопротивление датчика определяется положением плунжера в пространстве. Физика работы датчика аналогична предыдущему.




3.
 К3
К3
|
|


Перемещение (10-20) мм.
В зазор вводиться медная гильза, образующая короткозамкнутый виток. Индуктивность катушки будет уменьшаться, так как будет уменьшаться основной магнитный поток за счет охвата последним медного кольца по воздуху.
Погрешности индуктивного датчика:
· Нелинейная статическая характеристика;
· Влияние электромагнитной силы на клапан;
· Температурная погрешность.
Для расширения рабочей зоны применяются индуктивные датчики, включенные по дифференциальной либо мостовой схеме.
а) дифференциальная схема включения
Дифференциальный индуктивный датчик содержит две одинаковые катушки и общий якорь.

Входная величина – перемещение якоря. В дифференциальной схеме включения образуются два контура, в которых протекают токи, определяемые индуктивными сопротивлений дифференциального датчика. При смещении сердечника вправо индуктивное сопротивление  уменьшается, а индуктивное сопротивление
уменьшается, а индуктивное сопротивление  увеличивается. При среднем положении сердечника
увеличивается. При среднем положении сердечника  .
.
Дифференциальная схема исключает влияние окружающей среды.




 в) мостовая схема
в) мостовая схема

Две катушки дифференциального индуктивного датчика и резисторы  и
и  включается по мостовой схеме, где токи J1 и J2 определяется индуктивными сопротивлениями и . Если Мостовая схема также исключает влияние окружающей среды.
включается по мостовой схеме, где токи J1 и J2 определяется индуктивными сопротивлениями и . Если Мостовая схема также исключает влияние окружающей среды.
Лекция №5
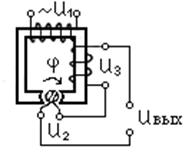
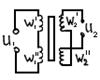
Трансформаторные датчики
Входная величина - перемещение якоря Х.
Выходная величина – ЭДС вторичной обмотки.
Трансформаторный датчик имеет клапан разрезающий магнитопровод.

 ;
;  ;
; 
 - коэффициент взаимоиндукции.
- коэффициент взаимоиндукции.
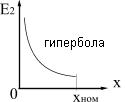
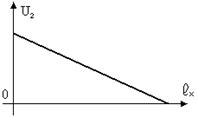
Выходное напряжение датчика является выходной функцией зазора. При Х=0:  =
=  – максимальный зазор (напряжение минимальное, перемещение максимальное). По мере приближения якоря к сердечнику Е2 нелинейно растет по гиперболическому закону.
– максимальный зазор (напряжение минимальное, перемещение максимальное). По мере приближения якоря к сердечнику Е2 нелинейно растет по гиперболическому закону.
Другие конструкции:
 1.
1.
 |
 2.
2.

При перемещении вторичной обмотка вдоль сердечника, наводимая в ней ЭДС изменяется по линейному закону из-за изменения индукции вдоль сердечника по гиперболическому закону.
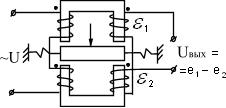
3. Дифференциальный трансформаторный датчик.


 Выходной сигнал достаточно мощный и может быть использован для передачи его без усиления. Температурная погрешность датчика отсутствует, линейный диапазон статической характеристики и ее крутизна увеличивается в два раза.
Выходной сигнал достаточно мощный и может быть использован для передачи его без усиления. Температурная погрешность датчика отсутствует, линейный диапазон статической характеристики и ее крутизна увеличивается в два раза.
Индукционные измерительные преобразователи
Принцип действия основан на законе электромагнитной индукции, где при пересечении проводником силовых линий в нем наводится ЭДС, и наоборот, если магнитное поле изменяется вокруг неподвижного проводника.
|
|
|
