 |


Цифровые измерительные преобразователи
|
|
|
|
Они относятся к дискретным приборам.
Выходной сигнал – код.
Код - это последовательность сигналов или совокупность состояний элементов.
Чаще используются позиционные системы исчисления – значение числа которых зависит от разряда.
Например, двоичные: 8-4-2-1;
Непозиционная система исчисления.
Непозиционная система остаточных классов.
Виды:
- непосредственного считывания;
- последовательного счета.
 Непрерывная функция заменяется дискретным значением непрерывного считывания. DХ – шаг квантования.
Непрерывная функция заменяется дискретным значением непрерывного считывания. DХ – шаг квантования.
Алгоритм выбора дискретной величины может быть различным (округление до ближайшего целого верхнего и нижнего уровня, в этом случаю погрешность ± DХ, (можно до ближайшего уровня вверх или вниз, тогда ± DХ/2). За счет дискретизации по времени появляется погрешность, определяемая скоростью изменения функции, которая может быть больше, чем DХ.
Таким образом, величина погрешности зависит от числа уровней входной величины, которое определяется N=An, где N число уровней, n - число разрядов входа.
А – число разряда системы исчисления, например, 2; 8; 10.
Пример: A = 2; n = 4; N = 24 = 16.
Датчик линейного или углового перемещения с кодирующей маской.
22 21 20 излучатель фотодиод
 0- 0 0 0
0- 0 0 0
1- 0 0 1
2- 0 1 0
3- 0 1 1
4- 1 0 0
5- 1 0 1
6- 1 1 0
7- 1 1 1
Четырехразрядный код Грея.
| ст.р. | м.р. | |||
|
|
|
Кодирующая маска представляет собой линейку с двумя различными свойствами («0» - не прозрачный участок, «1» - прозрачный участок).
Входная величина является перемещение маски, то есть пластинка соединена с механизмом, у которого необходимо измерить минимальное перемещение.
 Выходная величина – код.
Выходная величина – код.
Для повышения точности измерения необходимо, клетки по вертикали сделать меньше. При этом погрешность не может быть больше одной клетки.
За счет неточности расположения лампочек на границе появляется погрешность неопределенного считывания. И тогда погрешность будет менять весь диапазон.
Для избежания этого можно использовать коды, в которых комбинация отличается только в одном разряде (код Грея):

Кодирующая маска для датчика углового перемещения. В коде Грея погрешность от считывания не превышает одного любого разряда.
Цифровой датчик углового перемещения последовательного счета
выход
 Импульсы поступают на вход счетчика.
Импульсы поступают на вход счетчика.
Входная величина – угол поворота.
Выходная величина – код.
|
Редуктосин
Индукционный редуктосин представляет собой многополюсный бесконтактный ВТ, состоящий из статора с большим числом зубцов, собранный из пластин электротехнической стали и ротора, выполненного в виде зубчатого колеса из электротехнической стали. Количество зубцов на роторе неравно количеству зубцов на статоре, поэтому они смещены, их угловое расположение разное. В пазы статора укладывается три обмотки – возбуждения, синусная и косинусная. При питании обмотки возбуждения переменным током в синусной и косинусной обмотках, размещенных на соседних зубьях статора, наводится ЭДС, причем за малый угол поворота входной оси редуктосина амплитуды выходных сигналов в синусной и косинусной обмотках изменяется на один период, а при повороте на 360° число периодов равно передаточному отношению электрической редукции 2n, где n=1,2,3. От значение передаточного отношения зависит точность измерения угла (редуктосин БСКТ-128).
|
|
|
1) Двухфазный потенциометрический датчик угла с электрической редукцией.

Щетки разведены на 90° и механически зафиксированы.

2) индукционные фазовращатели на основе СКВТ.
а) двухфазные фазовращатели
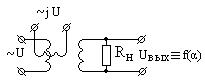
б)

однофазные фазовращатели

Здесь фазовые сдвиги равны, но противоположны по знаку.
Лекция № 16
|
|
|
