 |


Задача 1. Исследование автоматического регулятора скорости движущегося объекта при внешних воздействиях, носящих постоянный характер.
|
|
|
|
Федеральное агентство железнодорожного транспорта
Московский государственный университет путей сообщения
Нижегородский филиал
Контрольная работа №2
По дисциплине «Теория автоматического управления»
Выполнил студент 3 курса
Шифр:
Проверил:
Н.Новгород
Год
Задача 1. Исследование автоматического регулятора скорости движущегося объекта при внешних воздействиях, носящих постоянный характер.
Необходимо:
– построить структурную схему модели автоматического регулятора скорости движущегося объекта с использованием типовых звеньев САУ;
– вычислить параметры используемых типовых звеньев;
– осуществить исследование функционирования автоматического регулятора скорости при воздействии заданных возмущающих факторов, используя для моделирования программный продукт МВТУ (Моделирование В Технических Устройствах) или пакет программ «Simulink» математической среды «Matlab system».
Исходные данные:
1) скорость движения объекта на момент начала регулирования Vн = 45 км/ч;
2) заданная скорость движения объекта Vз = 65 км/ч;
3) статический коэффициент усиления апериодического звена в основной цепи регулятора K1 = 0,012;
4) постоянная времени апериодического звена в основной цепи регулятора T1=0,06 с;
5) постоянная времени апериодического звена в цепи обратной связи T2 = 0,5 с;
6) максимальное приращение ΔVв фактической скорости Vф от внешнего возмущающего воздействия A = 1,5 км/ч;
Решение.
Системой автоматического регулирования (САР) называется такая система, которая в течение достаточно длительного времени автоматически поддерживает требуемое неизменное значение некоторой физической величины (например, скорости линейного или углового перемещения объекта) в каком-либо процессе или изменяет это значение по заданной программе. САР, работающие на поддержание постоянного значения регулируемой величины, называют также системами стабилизации (например, стабилизаторы напряжения или тока).
|
|
|
Объект, параметры которого подлежат автоматической регулировке, называется объектом регулирования (ОР). Параметр, значение которого требуется регулировать, называется регулируемой величиной. Устройство, осуществляющее непосредственное регулирующее воздействие на объект регулирования, называют автоматическим регулятором, или просто регулятором. Регулятор, как правило, содержит следующие основные узлы:
– измерительное устройство, чувствительный элемент которого реагирует на фактическое значение регулируемой величины;
– усилительно-преобразовательное устройство, преобразующее (как правило, по линейному закону) входную физическую величину одной природы в физическую величину другой природы, используемую при формировании управляющего воздействия на исполнительное устройство;
– исполнительное устройство, предназначенное для оказания непосредственного регулирующего воздействия на объект регулирования.
Таким образом, САР представляет собой замкнутую систему, в которой передача воздействий от одного ее звена к другому осуществляется по замкнутому контуру.
Общая структурная схема автоматического регулятора скорости показана на рис. 1.

Рис. 1. Общая структурная схема автоматического регулятора скорости.
На этой схеме обозначены:
ЗУ – задающее устройство;
УС – устройство сравнения;
УП – усилительно-преобразовательное устройство;
ИСУ – исполнительное устройство (УП и ИСУ составляют регулятор);
ОР – объект регулирования;
ВВ – внешнее воздействие;
|
|
|
ЧЭ – чувствительный элемент;
ИУ – измерительное устройство.

Рис. 2. Структурная схема регулятора скорости в программе Simulink (Matlab).
На рис. 2 показана структурная схема регулятора в системе Simulink, с учетом характеристик звеньев.
ЗУ может быть представлено в виде генератора ступенчатой функции с амплитудой, численно равной значению заданной скорости Vз. УС осуществляет операцию вычитания (сравнения) сигнала обратной связи и заданного значения скорости.
Два последовательных функциональных блока в основной цепи регулятора: усилительно-преобразовательное (УП) и исполнительное (ИСУ) устройства представим в виде одного апериодического звена с коэффициентом усиления K1, характеризующим результирующий коэффициент усиления данной цепи, и постоянной времени Т1, которая характеризует инерционность исполнительного устройства.
Реальный объект регулирования заменяем его моделью в виде блока генератора ступенчатой функции, генерирующего постоянный сигнал, численно равный начальной скорости движущегося объекта Vн, и двух блоков, реализующих функцию суммирования всех воздействий: регулятора и внешнего воздействия A.
Регулируемый объект обладает инерционностью, т.е. для регулируемого изменения скорости требуется определенное время. Поэтому два последовательно включенных функциональных блока в цепи обратной связи: чувствительный элемент (ЧЭ) и измерительное устройство (ИУ) представляем в виде апериодического (инерционного) звена с постоянной времени T2 и статическим коэффициентом усиления K2.
Все параметры звеньев, за исключением K2, нам заданы в условии. Рассчитаем K2. Рассмотрим установившийся режим. равен:
Vф = Vн + ΔVр + ΔVв – скорость объекта регулирования;
ΔVв – возмущающее воздействие, в данной задаче оно постоянное и равно A;
ΔVр = K1*(Vз – Vос) – сигнал на выходе регулятора;
Vос = K2*Vф – сигнал на выходе цепи обратной связи.
Получили выражение:
Vф = Vн + ΔVв + K1*(Vз – K2*Vф)
Учтем, что в установившемся режиме Vф = Vз
Vз = Vн + ΔVв + K1*Vз – K1*K2*Vз
K1*K2 = (Vн + ΔVв)/Vз – 1 + K1
K2 = 1 + ((Vн + ΔVв)/Vз – 1)/K1
Подставим Vн = 45, Vз = 65, K1 = 0,012, ΔVв = A = 1,5:
K2 = 1 + ((45 + 2)/65 – 1)/0,012 = –22,718.
Найдем выражение для передаточной функции системы.
Vф = (Vз – Vос)W1(p) + Vн + A
|
|
|
Vос = Vф W2(p)
Vф = (Vз – Vф W2(p))*W1(p) + Vн + A
Vф*[1 + W2(p) W1(p)] = Vз W1(p) + Vн + A
Vф = [Vз W1(p) + Vн + A] / [1 + W2(p) W1(p)]
Передаточная функция есть отношение выходной величины Vф к входной Vз:

W1(p) = K1 / (1 + pT1)
W2(p) = K2 / (1 + pT2)
Последние три выражения будем использовать для расчета характеристик САР в системе Matlab. Копия рабочего стола Matlab в процессе расчетов приведена в Приложении 1. В результате получим переходную характеристику САР (рис. 3), ЛАЧХ и ЛФЧХ (рис. 4) и АФЧХ (рис. 5).

Рис. 3. Переходная характеристика САР.

Рис. 4. ЛАЧХ и ЛФЧХ САР.

Рис. 5. АФЧХ САР.
В пакете Control System выводятся на экран одновременно два графика АФЧХ (для противоположных значений фазовых углов). В нашем случае, как видно из графика ЛФЧХ, во всем диапазоне изменения частоты фазовый угол имеет положительное значение, следовательно, на рис. 5 верхний график относится к искомой АФЧХ.
Из анализа приведенных графиков можно сделать следующие выводы:
1) система устойчива, так как переходной процесс имеет затухающий характер. Выходная величина стремится к 1 и достигает значения 0,95 за время, равное 1,2 с, что характеризует длительность переходного процесса;
2) фазовый угол находится в отрицательной области и имеет максимум на круговой частоте 1,7 рад/с, равный -10°.
В программе Simulink пакета Matlab была собрана модель САР, показанная на рис. 2. Параметры модели установлены в соответствии с заданием и рассчитанным выше значением K2. Осциллограф Scope выводит на экран график Vф(t). Для трех значений T2 построены графики результатов моделирования (рис. 6 – 8). По графикам определено время регулирования tр по уровню 0,95 от Vз.
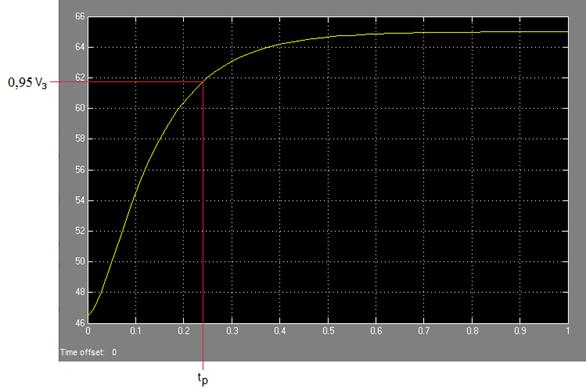
Рис. 6. График зависимости скорости движения от времени; T2 = 0,05 с.
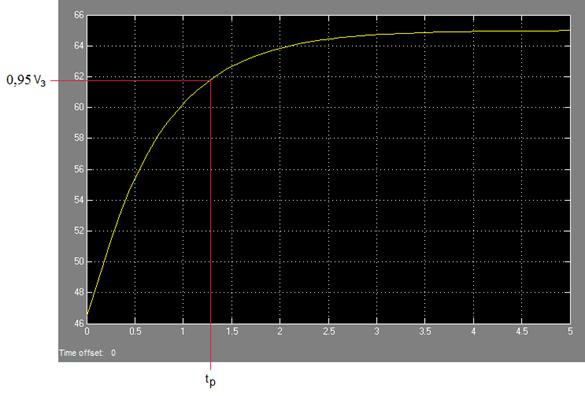
Рис. 7. График зависимости скорости движения от времени; T2 = 0,5 с.

Рис. 8. График зависимости скорости движения от времени; T2 = 2,5 с.
Время моделирования выбиралось в каждом случае таким образом, чтобы отобразить на графике все особенности процесса.
В результате получим зависимость времени регулирования tр от T2:
| T2, с | 0,05 | 0,5 | 2,5 |
| tр, с | 0,24 | 1,28 | 5,97 |
По приведенным графикам и из таблицы можно сделать следующий вывод: процесс установления заданной скорости замедляется при увеличении T2.
|
|
|
|
|
|
