 |


Задача 2. Исследование автоматического регулятора скорости движущегося объекта при внешних воздействиях, носящих переменный характер.
|
|
|
|
Необходимо:
– откорректировать структурную схему модели автоматического регулятора скорости движущегося объекта с учетом переменного характера внешнего возмущающего воздействия;
– задать параметры используемых типовых звеньев;
– осуществить исследование функционирования автоматического регулятора скорости при воздействии заданных возмущающих факторов.
Исходные данные:
1) период изменения внешнего возмущающего воздействия Tв = 5π с;
2) амплитуда периодически изменяющегося по синусоидальному закону внешнего возмущающего воздействия A = 1,5 км/ч;
3) другие данные те же, что в задаче 1.
Решение.
Для построения модели САУ с комбинированным управлением статический коэффициент усиления цепи обратной связи должен автоматически изменяться (подстраиваться под изменяющиеся условия функционирования САУ) в соответствии с выражением:

Следовательно, модель САУ должна содержать расчетный узел по автоматическому вычислению текущего значения коэффициента К2. Модель цепи обратной связи в структурной схеме модели САУ должна видоизмениться, а именно:
иметь расчетный узел по вычислению коэффициента К2;
иметь формирователь выходного сигнала Voc цепи обратной связи, состоящий из множителя, реализующего функцию перемножения:

Строим в программе Simulink модель САУ, удовлетворяющую этим требованиям (рис. 9).

Рис. 9. Структурная схема регулятора скорости с использованием комбинированного управления в программе Simulink (Matlab).
Для облегчения оценки погрешности регулирования скорости в схему модели САУ добавлен расчетный узел определения разности ΔV =Vз −Vф осциллограф Error. Второй осциллограф Velocity, как и раньше, показывает график скорости.
|
|
|
Время моделирования выбиралось в каждом случае таким образом, чтобы отобразить на графике все особенности процесса.
На рис. 10 – 18 показаны графики скорости (слева) и ошибки (справа) при трех значениях T2 и при трех значениях круговой частоты периодического внешнего воздействия.

Рис. 10. График изменения скорости движения при T2 = 0,05 с, ω = 0,4 рад/с.

Рис. 11. График изменения скорости движения при T2 = 0,05 с, ω = 0,2 рад/с.

Рис. 12. График изменения скорости движения при T2 = 0,05 с, ω = 0,1 рад/с.
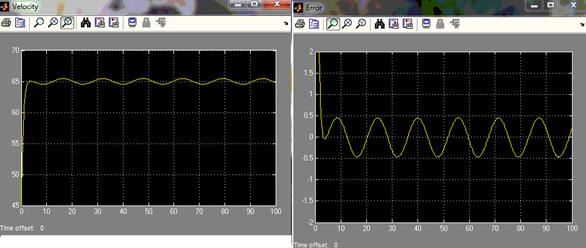
Рис. 13. График изменения скорости движения при T2 = 0,5 с, ω = 0,4 рад/с.

Рис. 14. График изменения скорости движения при T2 = 0,5 с, ω = 0,2 рад/с.

Рис. 15. График изменения скорости движения при T2 = 0,5 с, ω = 0,1 рад/с.
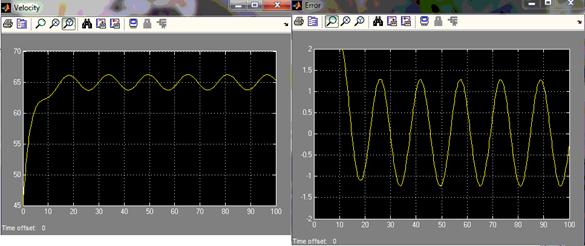
Рис. 16. График изменения скорости движения при T2 = 2,5 с, ω = 0,4 рад/с.

Рис. 17. График изменения скорости движения при T2 = 2,5 с, ω = 0,2 рад/с.

Рис. 18. График изменения скорости движения при T2 = 2,5 с, ω = 0,1 рад/с.
По результатам моделирования можно сделать следующие выводы: время регулирования во всех случаях практически не отличается от полученного в задаче 1, однако амплитуда колебаний скорости движения существенно зависит от T2 и ω: чем больше T2 и чем меньше ω, тем хуже регулируемость системы (больше амплитуда колебаний при периодическом внешнем воздействии).
Список использованной литературы
1. Панкратов Л.В. Конспект лекций по « Теория автоматического управления » / Учебн.пособие для вузов ж.д. транспорта. 2013, 35 с.
2. Серебряков А.С., Шумейко В.В. MATHCAD и решение задач электротехники / Учебн.пособие для вузов ж.д. транспорта. – М.: Маршрут, 2005, 240 с.
3. Электронный пакет программного обеспечения MATHCAD и
Электронный пакет программного обеспечения MATLAB.
Приложение 1.
>> sys1=tf([0.012],[0.06 1])
Transfer function:
0.012
----------
0.06 s + 1
>> sys2=tf([-22.718],[0.5 1])
Transfer function:
|
|
|
-22.72
---------
0.5 s + 1
>> Vz=65
Vz =
>> Vn=45
Vn =
>> A=1.5
A =
1.5000
>> sys=(sys1+(Vn+A)/Vz)/(1+sys1*sys2)
Transfer function:
0.001288 s^3 + 0.04586 s^2 + 0.4503 s + 0.7274
----------------------------------------------
0.0018 s^3 + 0.0636 s^2 + 0.6036 s + 0.7274
>> step(sys)
>> bode(sys)
>> nyquist(sys)
|
|
|
