 |


Задача Д1 (тема: “Динамика точки”)
|
|
|
|
Груз D массой т, получив в точке А начальную скорость u 0, движется в изогнутой трубе АВС, расположенной в вертикальной плоскости; участки трубы или оба наклонные,или один горизонтальный, а другой наклонный (рис. Д1.0-Д1.9, табл. Д1). На участке АВ на груз кроме силы тяжести действуют постоянная сила  (ее направление показано на рисунках) и сила сопротивления среды R, зависящая от скорости
(ее направление показано на рисунках) и сила сопротивления среды R, зависящая от скорости  груза (направлена против движения).
груза (направлена против движения).

| 
|

| 
|

| 
|
| 
|
| 
|
Таблица Д1
| Номер условия | m, кг | u0, м/с | Q, H | R, H | l, м | t 1, с | Fx,H |
| 2,4 | 0,8 u 2 | 1,5 | - | 4sin(4 t) | |||
| 0,4 u | - | 2,5 | -5 cos(4 t) | ||||
| 0,5 u 2 | - | 6t2 | |||||
| 1,8 | 0,3 u | - | -2 cos(2 t) | ||||
| 0,6 u 2 | - | -5sin(2 t) | |||||
| 4,5 | 0,5 u | - | 3 t | ||||
| 0,8 u 2 | 2,5 | - | 6 cos(4 t) | ||||
| 1,6 | 0,4 u | - | -3sin(4 t) | ||||
| 4,8 | 0,2 u 2 | - | 4 cos(2 t) | ||||
| 0,5 u | - | 4sin(2 t) |
В точке В груз, не изменяя значения своей скорости, переходит на участок ВС трубы, где на него кроме силы тяжести действует переменная сила  , проекция которой Fx на ось х задана в таблице.
, проекция которой Fx на ось х задана в таблице.
Считая груз материальной точкой и зная расстояние АВ = l или время t 1 движения груза от точки А до точки В, найти закон движения груза на участке ВС, т.е. x=f(t), где х = BD. Трением груза о трубу пренебречь.
Указания. Задача Д1 - на интегрирование дифференциальных уравнений движения точки (решение основной задачи динамики). Решение задачи разбивается на две части. Сначала нужно составить и проинтегрировать методом разделения переменных дифференциальное уравнение движения точки (груза) на участке АВ, учтя начальные условия. Затем, зная время движения на участке АВ или его длину, определить, какую скорость будет иметь груз в точке В. Эта скорость будет начальной для движения груза на участке ВС. После этого нужно составить и проинтегрировать дифференциальное уравнение движения груза на участке ВС тоже с учетом начальных условий, ведя отсчет времени от момента, когда груз находится в точке В, и полагая, что в этот момент времени t = 0. При интегрировании уравнения движения на участке АВ в случае, когда задана длина l участка, целесообразно перейти в уравнении к переменному х, учтя, что
|
|
|

Перед выполнением задания прочтите по учебнику тему: «Динамика материальной точки».
Динамика точки (краткие сведения из теории)
Второй закон динамики точки в инерциальной системе отсчета:
 ,(1)
где m – масса точки, ,(1)
где m – масса точки,  – абсолютное ускорение точки, – абсолютное ускорение точки,  – векторная сумма сил, действующих на точку (равнодействующая). Уравнение (1) – это дифференциальное уравнение движения точки в векторной форме. Спроектировав (1) на оси декартовой системы координат, получаем систему дифференциальных уравнений движения точки в координатной форме: – векторная сумма сил, действующих на точку (равнодействующая). Уравнение (1) – это дифференциальное уравнение движения точки в векторной форме. Спроектировав (1) на оси декартовой системы координат, получаем систему дифференциальных уравнений движения точки в координатной форме:
 , ,  , ,  , (2)
где , (2)
где  и т.д.
Первая задача динамики точки: заданы уравнения движения точки в координатной форме (см. задачу К1) и т.д.
Первая задача динамики точки: заданы уравнения движения точки в координатной форме (см. задачу К1)
 , ,  , ,  ; (3)
найти силу , действующую на точку. Решение: получив дифференциальные уравнения (2), дифференцируем заданные функции (3), подставляем в (2), находим ; (3)
найти силу , действующую на точку. Решение: получив дифференциальные уравнения (2), дифференцируем заданные функции (3), подставляем в (2), находим  , ,  , ,  и .
Вторая задача динамики точки (основная): задана сила , действующая на точку; найти кинематические уравнения движения (3) точки. Решение: составив уравнение (1) и спроектировав его на оси, получим уравнения (2). Добавив начальные условия (при и .
Вторая задача динамики точки (основная): задана сила , действующая на точку; найти кинематические уравнения движения (3) точки. Решение: составив уравнение (1) и спроектировав его на оси, получим уравнения (2). Добавив начальные условия (при  ) )  , ,  , ,  , ,  , ,  , ,  проинтегрируем (2) и найдем (3). проинтегрируем (2) и найдем (3).
|
Пример Д1. На вертикальном участке АВ трубы (рис. Д1) на груз D массой т действуют сила тяжести и сила сопротивления  ; расстояние от точки А, где u = u 0, до точки В равно l. На наклонном участке ВС на груз действуют сила тяжести и переменная сила F = F (t), заданная в ньютонах.
; расстояние от точки А, где u = u 0, до точки В равно l. На наклонном участке ВС на груз действуют сила тяжести и переменная сила F = F (t), заданная в ньютонах.
|
|
|

| Дано: т = 2 кг, R = mu 2, где m = 0,4 кг/м, u 0 = 5 м/с, l = 2,5 м, fх = 16 sin (4 t). Определить: х = f (t) - закон движения груза на участке ВС. |
Решение. 1. Рассмотрим движение груза на участке АВ, считая груз материальной точкой. Изображаем груз (в произвольном положении) и действующие на него силы  Проводим ось Az и составляем дифференциальное уравнение движения груза в проекции на эту ось:
Проводим ось Az и составляем дифференциальное уравнение движения груза в проекции на эту ось:
 (1)
(1)
Далее находим: Рz = Р = mg, Rz = -R = - mu 2; подчеркиваем, Что в уравнении все переменные силы надо обязательно выразить через величины, от которых они зависят. Учтя еще, что uz = u, получим
 (2)
(2)
Введем для сокращения записей обозначения
 (3)
(3)
где при подсчете принято g» 10 м/с2. Тогда уравнение (2) можно представить в виде
 (4)
(4)
Разделяя в уравнении (4) переменные, а затем беря от обеих частей интегралы, получим
 (5)
(5)
По начальным условиям при z = 0 u = u 0, что дает С 1 =  , и из равенства (5) находим
, и из равенства (5) находим


 (6)
(6)
Полагая в равенстве (6) z = l = 2,5 м и заменяя k и п их значениями (3), определим скорость u B груза в точке В (u0 = 5 м/с, число е = 2,7):
 (7)
(7)
2. Теперь рассмотрим движение груза на участке ВС; найденная скорость u B будет для движения на этом участке начальной скоростью (u 0 = u B). Изображаем груз (в произвольном положении) и действующие на него силы 
Проведем из точки В ось Вх и составим дифференциальное уравнение движения груза в проекции на эту ось:
 (8)
(8)
Так как Рх = Р sin 30° = 0,5 mg, Nx = 0, Fx = 16 sin (4 t), то уравнение (8) примет вид
 (9)
(9)
Разделив обе части равенства на т = 2 кг и полагая опять g» 10 м/с2, получим
 (10)
(10)
Умножая обе части уравнения (10) на dt и интегрируя, найдем
 (11)
(11)
Будем теперь отсчитывать время от момента, когда груз находится в точке В, считая в этот момент t = 0. Тогда при t = 0  , где u B дается равенством (7). Подставляя эти величины в (11), получим
, где u B дается равенством (7). Подставляя эти величины в (11), получим
C 2 = u B + 2 cos 0 = 6,4 + 2 = 8,4.
При найденном значении C 2, уравнение (11) дает
 (12)
(12)
Умножая здесь обе части на dt и снова интегрируя, найдем
 (13)
(13)
Так как при t = 0 х = 0, то С 3 = 0, и искомый закон движения груза будет
х = 2,5 t 2 + 8,4 t - 0,5 sin (4 t), (14)
где х - в метрах, t - в секундах.
Задача Д3
(тема: “Теорема об изменении кинетической энергии системы”)
Механическая система состоит из грузов 1 и 2 (коэффициент трения грузов о плоскость f = 0,1), цилиндрического сплошного однородного катка 3 и ступенчатых шкивов 4 и 5 с радиусами ступеней R 4 = 0,3 м, r 4 = 0,1 м, R 5 = 0,2 м, r 5 = 0,1 м (массу каждого шкива считать равномерно распределенной по его внешнему ободу) (рис. Д3.0 – Д3.9, табл. Д3). Тела системы соединены друг с другом нитями, намотанными на шкивы; участки нитей параллельны соответствующим плоскостям.
|
|
|
Под действием силы F = f (s), зависящей от перемещения точки приложения силы, система приходит в движение из состояния покоя. При движении системы на шкивы 4 и 5 действуют постоянные моменты сил сопротивлений, равные соответственно M 4 и М 5.
Определить значение искомой величины в тот момент времени, когда перемещение точки приложения силы  равно s,. Искомая величина указана в столбце "Найти" таблицы, где обозначено:
равно s,. Искомая величина указана в столбце "Найти" таблицы, где обозначено:  - скорость груза 1,
- скорость груза 1,  - скорость центра масс катка 3,
- скорость центра масс катка 3,  - угловая скорость тела 4 и т.д.
- угловая скорость тела 4 и т.д.

| 
|

| 
|

| 
|
| 
|

| 
|
Таблица Д3
| Номер усло-вия | m 1, кг | m2, кг | m 3, кг | m 4, кг | m 5, кг | M 4, Н×м | M 5, Н×м | F = f(s) | s 1, м | Найти |
| 0,8 | 50(2+3 s) | 1,0 |
| |||||||
| 0,6 | 20(5+2 s) | 1,2 | 
| |||||||
| 0,4 | 80(3+4 s) | 0,8 |
| |||||||
| 0,3 | 40(4+5 s) | 0,6 | 
| |||||||
| 0,6 | 30(3+2 s) | 1,4 |
| |||||||
| 0,9 | 40(3+5 s) | 1,6 |
| |||||||
| 0,8 | 60(2+5 s) | 1,0 |
| |||||||
| 0,6 | 30(8+3 s) | 0,8 | 
| |||||||
| 0,3 | 40(2+5 s) | 1,6 |
| |||||||
| 0,4 | 50(3+2 s) | 1,4 |
|
Теорема об изменении кинетической энергии механической системы
(краткие сведения из теории)
Кинетическая энергия.Кинетической энергией точки называется величина  , где m – масса точки, , где m – масса точки,  – абсолютная скорость точки. Кинетическая энергия механической системы – абсолютная скорость точки. Кинетическая энергия механической системы
 , (1)
где , (1)
где  – масса точки системы, – масса точки системы,  – абсолютная скорость этой точки.
При поступательном движении твердого тела – абсолютная скорость этой точки.
При поступательном движении твердого тела
 ,
где M – масса тела, – скорость тела;
при вращении твердого тела вокруг неподвижной оси ,
где M – масса тела, – скорость тела;
при вращении твердого тела вокруг неподвижной оси
 ,
где ,
где  – момент инерции тела относительно оси вращения, w – угловая скорость тела;
при плоском движении тела – момент инерции тела относительно оси вращения, w – угловая скорость тела;
при плоском движении тела
 ,
где M – масса тела, ,
где M – масса тела,  – скорость центра масс, – скорость центра масс,  – момент инерции тела относительно оси, проходящей через центр масс С, w – угловая скорость тела. – момент инерции тела относительно оси, проходящей через центр масс С, w – угловая скорость тела.
|
Момент инерции тела относительно оси z – это величина
 ,
где – масса точки тела, ,
где – масса точки тела,  – расстояние от этой точки до оси z.
Момент инерции тела зависит от формы тела и положения оси z. Значения для однородных тел простой формы (кольцо, стержень, диск, прямоугольник, цилиндр и т. д.) приводятся в справочниках по механике; значения , необходимые для решения данной задачи, приведены ниже в указаниях к решению.
Если задан радиус инерции r тела, то – расстояние от этой точки до оси z.
Момент инерции тела зависит от формы тела и положения оси z. Значения для однородных тел простой формы (кольцо, стержень, диск, прямоугольник, цилиндр и т. д.) приводятся в справочниках по механике; значения , необходимые для решения данной задачи, приведены ниже в указаниях к решению.
Если задан радиус инерции r тела, то  , где M – масса тела.
Элементарная работа силы dA на бесконечно малом перемещении ds точки, в которой приложена сила, равна , где M – масса тела.
Элементарная работа силы dA на бесконечно малом перемещении ds точки, в которой приложена сила, равна
 , (2)
где – сила, ds – модуль бесконечно малого перемещения точки, – скорость точки, в которой приложена сила (направление , (2)
где – сила, ds – модуль бесконечно малого перемещения точки, – скорость точки, в которой приложена сила (направление  совпадает с направлением ). Выражение (2) – одна из возможных форм записи совпадает с направлением ). Выражение (2) – одна из возможных форм записи  . Например, если учесть, что . Например, если учесть, что  , то из (2) следует еще одна форма записи: , то из (2) следует еще одна форма записи:
 , (3)
где dt – время бесконечно малого перемещения. Из (2) (или (3)) следует, что , (3)
где dt – время бесконечно малого перемещения. Из (2) (или (3)) следует, что
 если если  ;
если ;
если  ; ;
 если если  ; ;
 если если  .
Если сила приложена к точке вращающегося тела, то, применяя (2), получим .
Если сила приложена к точке вращающегося тела, то, применяя (2), получим
 , (4)
где , (4)
где  – момент силы относительно оси вращения тела, – момент силы относительно оси вращения тела,  – бесконечно малый угол поворота тела. Если на тело действует пара сил, то (4) дает элементарную работу пары сил, где – момент пары сил относительно оси z.
Работа силы на конечном перемещении точки из – бесконечно малый угол поворота тела. Если на тело действует пара сил, то (4) дает элементарную работу пары сил, где – момент пары сил относительно оси z.
Работа силы на конечном перемещении точки из  в в 
 . (5)
Из (5) следуют выражения для работы силы в частных случаях.
Работа силы тяжести (постоянной): . (5)
Из (5) следуют выражения для работы силы в частных случаях.
Работа силы тяжести (постоянной):
 ,
где P=mg – сила тяжести, ,
где P=mg – сила тяжести,  – перемещение центра масс тела по вертикали. Знак “–“ соответствует движению центра масс вверх. – перемещение центра масс тела по вертикали. Знак “–“ соответствует движению центра масс вверх.
|
Теорема об изменении кинетической энергии системы.
Формулировка (в интегральной (конечной) форме): изменение кинетической энергии системы на некотором конечном перемещении системы из одного положения в другое равно сумме работ всех внешних и внутренних сил, приложенных к точкам системы на соответствующих конечных перемещениях точек приложения этих сил.
Математическая запись:
 .
Если система состоит из абсолютно твердых тел, соединенных нерастяжимыми нитями или стержнями (неизменяемая система), то .
Если система состоит из абсолютно твердых тел, соединенных нерастяжимыми нитями или стержнями (неизменяемая система), то  . .
|
Указания. Задача ДЗ - на применение теоремы об изменении кинетической энергии системы. При решении задачи учесть, что кинетическая энергия системы равна сумме кинетических энергий всех входящих в систему тел: эту энергию нужно выразить через ту скорость (линейную или угловую), которую в задаче надо определить. При вычислении кинетической энергии катка, совершающего плоское движение, для установления зависимости между его угловой скоростью и скоростью его центра масс воспользоваться понятием о мгновенном центре скоростей (кинематика). При определении работы все перемещения следует выразить через заданное перемещение s 1, учтя, что зависимость между перемещениями здесь будет такой же, как между соответствующими скоростями.
|
|
|
|
|
|
Когда по данным таблицы m 2 = 0, груз 2 на чертеже не изображать; шкивы 4 и 5 всегда входят в систему.
Пример ДЗ. Механическая система (рис. ДЗ) состоит из сплошного цилиндрического катка l, ступенчатого шкива 2 с радиусами ступеней R 2 и r 2 (масса шкива равномерно распределена по его внешнему ободу) и груза 3 (коэффициент трения груза о плоскость равен f). Тела системы соединены друг с другом нитями, намотанными на шкив 2.
| Под действием силы F = f (s), зависящей от перемещения s точки ее приложения, система приходит в движения из состояния покоя. При движении на шкив 2 действует постоянный момент М 2 сил сопротивления.
Дано: m 1 = 4 кг, m 2 = 10кг,
m 3 = 8 кг, R 2 = 0,2 м, r 2 = 0,1м, f = 0,2. М 2 = 0,6 Н × м, F = 2(1+2 s) Н, s 1 = 2м.
Определить: скорость  центра масс катка, когда s = s 1.
центра масс катка, когда s = s 1.
|
Решение. 1. Рассмотрим движение неизменяемой механической системы, состоящей из тел 1 2, 3, соединенных нитями. Изобразим все действующие на систему внешние силы: активные  , момент сопротивления М 2 реакции
, момент сопротивления М 2 реакции  и силы трения
и силы трения  и
и  .
.
Для определения  воспользуемся теоремой об изменении кинетической энергии системы
воспользуемся теоремой об изменении кинетической энергии системы
 (1)
(1)
2. Определяем Т 0 и Т. Так как в начальный момент система находилась в покое, то Т 0 = 0. Величина Т равна сумме энергий всех тел системы:
 (2)
(2)
Учитывая, что тело 1 совершает плоское движение, тело 3 движется поступательно, а тело 2 вращается вокруг неподвижной оси, получим
 (3)
(3)
Все входящие сюда скорости следует выразить через искомую . Приняв во внимание, что точка K 1 - мгновенный центр скоростей катка 1, и обозначив радиус катка через r 1, получим
 (4)
(4)
Кроме того, входящие в (3) моменты инерции имеют значения
 (5)
(5)
Подставив все величины (4) и (5) в равенство (3), а затем используя равенство (2) получим окончательно:
 (6)
(6)
3. Теперь найдем сумму работ всех действующих внешних сил при том перемещении, которое будет иметь система, когда точка С 1 пройдет путь s 1. Одновременно все перемещения следует выразить через заданную величину s 1, для чего учтем, что здесь зависимость между перемещениями будет такой же, как и между соответствующими скоростями в равенствах (4), т.е. 
 . В результате получим:
. В результате получим:



Работа остальных сил равна нулю, так как точка K 1, где приложены силы  и , является мгновенным центром скоростей, точка O, где приложены
и , является мгновенным центром скоростей, точка O, где приложены  , и
, и  , неподвижна, а реакция
, неподвижна, а реакция  перпендикулярна перемещению груза 3. Тогда окончательно
перпендикулярна перемещению груза 3. Тогда окончательно
 (7)
(7)
4. Подставив выражения (6) и (7) в уравнение (1) и учитывая, что T 0 = 0, получим
 (8)
(8)
При числовых значениях заданных величин равенство (8) дает

Отсюда находим искомую скорость.
Ответ: = 1.53м/с.
Задача Д4
(тема: “Принцип возможных перемещений”)
Механизм, расположенный в горизонтальной плоскости, находится под действием приложенных сил в равновесии; положение равновесия определяется углами  ,
,  ,
,  ,
,  ,
,  (рис. Д4.0-Д4.9, табл. Д4а и Д4б). Длины стержней механизма (кривошипов) равны: l 1 = 0,4 м, l 4 = 0,6 м (размеры l 2 и l 3 произвольны); точка E находится в середине соответствующего стержня.
(рис. Д4.0-Д4.9, табл. Д4а и Д4б). Длины стержней механизма (кривошипов) равны: l 1 = 0,4 м, l 4 = 0,6 м (размеры l 2 и l 3 произвольны); точка E находится в середине соответствующего стержня.
На ползун В механизма действует сила упругости пружины ;численно  , где с – коэффициент жесткости пружины,
, где с – коэффициент жесткости пружины,  – ее деформация. Кроме того, на рис. Д4.0 и Д4.1 на ползун D действует сила
– ее деформация. Кроме того, на рис. Д4.0 и Д4.1 на ползун D действует сила  , а на кривошип О 1 А – пара сил с моментом М;на рис. Д4.2- Д4.9 на кривошипы O 1 A и О 2 D действуют пары сил с моментами M 1 и М 2.
, а на кривошип О 1 А – пара сил с моментом М;на рис. Д4.2- Д4.9 на кривошипы O 1 A и О 2 D действуют пары сил с моментами M 1 и М 2.
Определить, чему равна при равновесии деформация пружины, и указать, растянута пружина или сжата.
Значения всех заданных величин для рис. Д4.0-Д4.4 приведены в табл. Д4а, а для рис. Д4.5-Д4.9 в табл. Д4б. В этих таблицах сила Q дана в ньютонах, а моменты М, M 1, M 2 – в ньютоно-метрах.
Построение чертежа начинать со стержня, направление которого определяется углом ; для большей наглядности ползун с направляющими и пружину изобразить так, как в примере Д4 (см. рис. Д4, а также рис. Д4.10б). Если на чертеже решаемого варианта задачи прикрепленный к ползуну В стержень окажется совмещенным с пружиной (как на рис. Д4.10а), то пружину следует считать прикрепленной к ползуну с другой стороны (как на рис. Д4.10б, где одновременно иначе изображены направляющие).
Перед выполнением задания прочтите по учебнику тему: «Принцип возможных перемещений».
Ответьте на вопросы:
1. Как определяется число степеней свободы системы?
2. Что такое обобщенные координаты?
3. Что называется возможными перемещениями системы?
4. Формулы для вычисления элементарной работы силы на возможном перемещении (сравните с формулами, которые применили в задаче Д4).
5. Какие связи называются идеальными?
6. Сформулируйте принцип возможных перемещений для системы и запишите соответствующее уравнение.
7. Запишите уравнение мощностей, эквивалентное принципу возможных перемещений.
 Рис. Д4.0
Рис. Д4.0
|  Рис. Д4.1
Рис. Д4.1
| |
 Рис. Д4.2
Рис. Д4.2
|  Рис. Д4.3
Рис. Д4.3
| |
 Рис. Д4.4
Рис. Д4.4
| 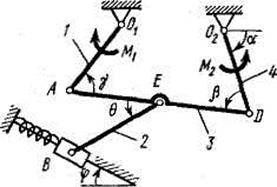 Рис. Д4.5
Рис. Д4.5
| |
 Рис. Д4.6
Рис. Д4.6
| 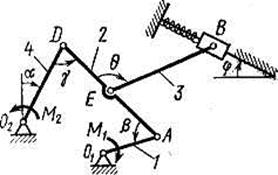 Рис. Д4.7
Рис. Д4.7
| |
 |
Рис. Д4.8
 Рис. Д4.9
Рис. Д4.9

 , направленным в сторону перемещения.
Число степеней свободы. Число независимых перемещений точек системы называется числом степеней свободы системы. Если система состоит из n точек, на которые наложены k геометрических (не накладывающих ограничений на скорости точек) связей, то она имеет
, направленным в сторону перемещения.
Число степеней свободы. Число независимых перемещений точек системы называется числом степеней свободы системы. Если система состоит из n точек, на которые наложены k геометрических (не накладывающих ограничений на скорости точек) связей, то она имеет  степеней свободы. В дальнейшем связи считаются геометрическими. Следовательно, чтобы задать положение такой системы в любой момент времени, не нужно задавать все координаты всех точек, а надо задать только независимые параметры.
Независимые параметры, число которых равно числу степеней свободы, и которые однозначно определяют положение всей системы в любой момент времени, называются обобщенными координатамии обозначаются
степеней свободы. В дальнейшем связи считаются геометрическими. Следовательно, чтобы задать положение такой системы в любой момент времени, не нужно задавать все координаты всех точек, а надо задать только независимые параметры.
Независимые параметры, число которых равно числу степеней свободы, и которые однозначно определяют положение всей системы в любой момент времени, называются обобщенными координатамии обозначаются
 ,
,  ,…,
,…,  ,
где s – число степеней свободы. В качестве обобщенных координат можно выбрать декартовы координаты точек, углы поворота тел и т.д.
,
где s – число степеней свободы. В качестве обобщенных координат можно выбрать декартовы координаты точек, углы поворота тел и т.д.
 .
(Элементарная работа на возможном перемещении обозначается
.
(Элементарная работа на возможном перемещении обозначается  ). Все встречавшиеся ранее связи (шарниры, поверхности, нити, подшипники и т.д.) – идеальные при отсутствии трения. Если трение имеется и работа силы трения отлична от нуля, то сила трения включается в число активных сил.
Принцип возможных перемещений. Формулировка: для равновесия системы с геометрическими идеальными связями необходимо и достаточно, чтобы сумма элементарных работ всех активных сил, действующих на точки системы, на любом возможном перемещении системы из данного положения была равна нулю:
). Все встречавшиеся ранее связи (шарниры, поверхности, нити, подшипники и т.д.) – идеальные при отсутствии трения. Если трение имеется и работа силы трения отлична от нуля, то сила трения включается в число активных сил.
Принцип возможных перемещений. Формулировка: для равновесия системы с геометрическими идеальными связями необходимо и достаточно, чтобы сумма элементарных работ всех активных сил, действующих на точки системы, на любом возможном перемещении системы из данного положения была равна нулю:
 , (1)
или (с учетом выражений для элементарной работы силы, см. задачу Д4)
, (1)
или (с учетом выражений для элементарной работы силы, см. задачу Д4)
 ,
а также
,
а также
 . (2)
В (2) выполнено деление на
. (2)
В (2) выполнено деление на  и поэтому суммируются мощности сил.
и поэтому суммируются мощности сил.

 ).
). (1)
(1) , определим l.
, определим l.