 |


Параметры настройки блоков системы управления
|
|
|
|
Если не оговорено особо, значение параметра Sample Time блоков системы управления рекомендуется устанавливать равным -1 (for inherited), т.е. наследовать от предыдущего блока. Там, где это доступно устанавливать флажок Enable zero crossing detection определения прохождения сигнала через ноль.
Блок Constant задает постоянный по уровню сигнал. Параметры:
1. Constant value– Значение константы. Значение константы может быть действительным или комплексным числом, вычисляемым выражением, вектором или матрицей.
2. Sample Time следует установить равным Inf – бесконечность.
Блок Gain – усилитель для умножения входного сигнала на постоянный коэффициент. Параметры:
1. Gain – Коэффициент усиления. может быть положительным или отрицательным числом, как больше, так и меньше 1. Коэффициент усиления можно задавать в виде скаляра, матрицы или вектора, а также в виде вычисляемого выражения любого типа, за исключением логического (boolean). По умолчанию коэффициент усиления является действительным числом типа double.
2. Multiplication – Способ выполнения операции. Может принимать значения (из списка):
· Element-wise K*u – поэлементный: блок выполняет операцию умножения на заданный коэффициент скалярного сигнала или каждого элемента векторного сигнала.
· Matrix K*u – матричный: выполняется операция матричного умножения сигнала u на коэффициент усиления K – левосторонний операнд, заданный матрицей.
· Matrix u*K – матричный, выполняется операция матричного умножения сигнала u на коэффициент усиления K – правосторонний операнд, заданный матрицей.
3. Saturate on integer overflow – флажок подавления переполнения целого. При установленном флажке ограничение сигналов целого типа выполняется корректно.
Для операции поэлементного усиления входной сигнал может быть скалярным, векторным или матричным любого типа, за исключением логического (boolean). Элементы вектора должны иметь одинаковый тип сигнала. Выходной сигнал блока будет иметь тот же самый тип, что и входной сигнал. При вычислении выходного сигнала блок Gainиспользует следующие правила: если входной сигнал действительного типа, а коэффициент усиления комплексный, то выходной сигнал будет комплексным; если тип входного сигнала отличается от типа коэффициента усиления, то Simulinkпытается выполнить приведение типа коэффициента усиления к типу входного сигнала. В том случае, если такое приведение невозможно, то расчет будет остановлен с выводом сообщения об ошибке. Такая ситуация может возникнуть, например, если входной сигнал есть беззнаковое целое (uint8), а параметр Gainзадан отрицательным числом.
|
|
|
Блок Hit Crossing – компаратор для определения момента времени, когда входной сигнал пересекает заданное пороговое значение. В момент пересечения порогового уровня блок вырабатывает единичный сигнал длительностью в один интервал дискретности. Параметры:
1. Hit crossing offset – порог – значение, пересечение которого входным сигналом требуется идентифицировать.
2. Hit crossing direction – направление пересечения выбирается из списка:
· rising – возрастание;
· failing – убывание;
· either – оба направления.
3. Show output port – флажок показа выходного порта. Если флажок снят, то точка пересечения сигналом порогового уровня находится, но выходной сигнал блоком не генерируется.
In и Out входной и выходной порты подсистемы. Параметры:
1. Port number – номер порта;
2. Icon display – подпись пиктограммы выбирается из списка:
· Signal name – имя сигнала;
· Port number – номер порта;
· Port number and Signal name – номер порта и имя сигнала.
Блок Switch для переключения входных сигналов (верхний и нижний входы ключа) по сигналу управления (средний вход). Параметры:
|
|
|
1. Threshold – порог управляющего сигнала.
2. Criteria for passing first input – критерий для прохождения сигнала с первого (верхнего) входа:
u2>=Threshold – сигнал управления не меньше порога;
u2>Threshold – сигнал управления больше порога;
u2~=0 – сигнал управления не равен нулю;
Блок работает следующим образом: если сигнал управления, подаваемый на средний вход, соответствует заданному критерию, то на выход блока проходит сигнал с первого входа. Если сигнал управления не соответствует критерию, то на выход блока будет поступать сигнал с нижнего входа.
Блок Integrator – для интегрирования входного сигнала. Параметры:
1. External reset – внешний сброс. Задает тип внешнего управляющего сигнала, обеспечивающего сброс интегратора к начальному состоянию. Выбирается из списка:
· none – нет (сброс не выполняется);
· rising – нарастающий сигнал (передний фронт сигнала);
· falling – спадающий сигнал (задний фронт сигнала);
· either – нарастающий либо спадающий сигнал;
· level – не нулевой сигнал (сброс выполняется если сигнал на управляющем входе становится не равным нулю).
Если выбран какой-либо (но не none), тип управляющего сигнала, то на изображении блока появляется дополнительный управляющий вход. Рядом с дополнительным входом будет показано условное обозначение управляющего сигнала.
2. Initial condition source – источник начального значения выходного сигнала выбирается из списка:
· internal – внутренний;
· external – внешний. В этом случае на изображении блока появляется дополнительный вход, обозначенный x0, на который необходимо подать сигнал, задающий начальное значение выходного сигнала интегратора.
3. Initial condition – начальное условие. Установка начального значения выходного сигнала интегратора. Параметр доступен, если выбран внутренний источник начального значения выходного сигнала.
4. Limit output – флажок использования ограничения выходного сигнала.
5. Upper saturation limit – верхний уровень ограничения выходного сигнала. Может быть задан как числом, так и символьной последовательностью inf, то есть +∞.
6. Lower saturation limit – нижний уровень ограничения выходного сигнала. Может быть задан как числом, так и символьной последовательностью -inf, то есть -∞.
7. Show saturation port – управляет отображением порта, выводящего сигнал, свидетельствующий о выходе интегратора на ограничение:
|
|
|
0, если интегратор не находится на ограничении;
+1, если выходной сигнал интегратора достиг верхнего ограничивающего предела;
-1, если выходной сигнал интегратора достиг нижнего ограничивающего предела.
8. Show state port – флажок отображения/сокрытия порта состояния блока. Данный порт используется в том случае, если выходной сигнал интегратора требуется подать в качестве сигнала обратной связи этого же интегратора. На пример, при установке начальных условий через внешний порт или при сбросе интегратора через порт сброса. Выходной сигнал с этого порта может использоваться также для организации взаимодействия с управляемой подсистемой.
9. Absolute tolerance – абсолютная погрешность. Можно установить равной auto.
Приложение 3
Измерительные приборы
1. Блок Current Measurements измерения мгновенного значения тока – амперметр. Данный блок предназначен для снятия сигналов тока в ветвях виртуальной модели. При этом сам блок включается в разрыв ветви с измеряемым током зажимами "+" и
"–", а выходной сигнал снимается с зажима "i". Как правило, его всегда используют в паре с другими элементами (например, с дисплеем или осциллографом) для визуализации результатов измерений.
Блок измерения мгновенного значения тока не требует настройки.
2. Блок Voltage Measurements измерения мгновенного значения напряжения – вольтметр. Данный блок предназначен для снятия сигналов напряжения. При этом сам блок включается параллельно участку цепи с измеряемым напряжением зажимами "+" и
"–", а выходной сигнал снимается с зажима "u". В остальном этот блок полностью аналогичен предыдущему.
3. Гармонический анализатор Fourier analyzer предназначен для измерения параметров гармонических составляющих сигнала. Этот блок имеет один вход и два выхода. На вход signal поступает анализируемый сигнал, с выхода magnitude снимается амплитуда заданной гармоники, с выхода angle – фаза.
Окно настройки параметров гармонического анализатора показано на рис. П3.1. В полях настройки задаются следующие параметры:
|
|
|
· Fundamental frequency – основная частота сигнала (Гц);
· Harmonic – номер анализируемой гармоники. При этом постоянной составляющей соответствует значение 0, основной гармонике – 1, второй гармонике – 2 и т.д.
В данной лабораторной работе интерес представляет основная гармоника тока тиристора. поэтому анализатор Fourier настраивается на первую гармонику.
4. Блок RMS измерения среднеквадратического значения периодической величины. Данный блок предназначен для измерения действующего значения сигнала, поступающего на вход. В окне настройки (рис. П3.2) этого блока задается только один параметр – основная частота сигнала.

| |
| Рис. П3.1 | |

| |
| Рис. П3.2 |
5. Блок Mean Value измерения среднего значения периодической величины. Данный блок предназначен для измерения среднего значения сигнала, поступающего на вход. В окне настройки (рис. П3.3) этого блока задается только один параметр – период основной частоты сигнала.
6. Мультиметр для измерения электрических величин блоков SimPowerSystems, для которых в их окне диалога установлен параметр Measurements (измеряемые переменные). Окно настройки этого блока (рис. П3.4) содержит два списка. В первом из них Avialable Measurements (переменные, доступные для измерения) после нажатия кнопки Update появляются соответствующие измеряемые величины.

| ||
Рис. П3.3
|
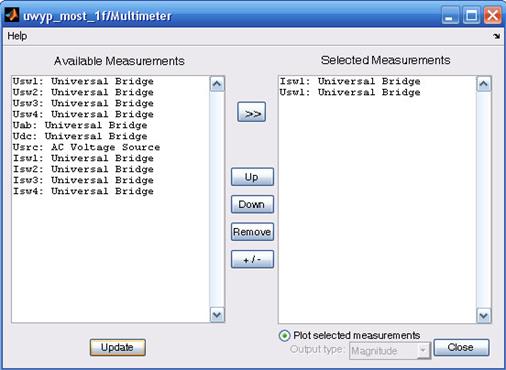
Все или часть из них могут быть переведены во второй список Selected Measurements (измеряемые переменные) для измерения и регистрации результатов. Для управления списком отображаемых переменных используются следующие кнопки:
>> – добавить выделенную переменную первого списка во второй;
Up – переместить выделенную переменную вверх на одну позицию в списке измеряемых величин;
Down – переместить выделенную переменную вниз на одну позицию в списке измеряемых величин;
Remove – удалить выделенную переменную из списка измеряемых величин;
+/- – изменить знак выделенной переменной в списке измеряемых величин;
Переключатель Plot selected measurements позволяет по окончанию моделирования вывести кривые измеряемых сигналов в отдельное графическое окно (рис. 18) в виде временных зависимостей. Внимание: перед началом очередного этапа моделирования следует принудительно закрыть графическое окно мультиметра. Иначе после серии экспериментов открытыми будут несколько графических окон, и разобраться, какое из них к какому измерению относится, будет проблематично.
В окне Output type задается вид выходного сигнала мультиметра. Установка параметра доступна, только если с помощью блока Powergui установлен режим расчета схемы комплексным методом (Phasor simulation).
|
|
|
Выходным сигналом блока является вектор сигналов измеряемых переменных. Внимание: знаки измеряемых токов и напряжений могут не соответствовать действительности, т.к. блоки, для которых выполняются измерения, для удобства изображения могут быть подключены в схему в перевернутом виде. При этом какие-либо значки для указания положительных направлений токов и напряжений в самих блоках отсутствуют – порты блоков библиотеки SimPowerSystems являются ненаправленными, по ним нельзя судить о положительных направлениях токов и напряжений! К выходу мультиметра можно подключать измерительные приборы: дисплей, анализатор спектра и т.п. Мультиметр имеет только один выход и поэтому для одновременного подключения нескольких приборов или выделения одного/нескольких сигналов следует использовать демультиплексор. Сигналы на выходе мультиметра следуют в порядке их перечисления в поле selected measurements.
6. Осциллограф Scope. Этот блок строит графики исследуемых сигналов в функции времени. Позволяет наблюдать за изменениями сигналов в процессе моделирования. Графическое окно осциллографа открывается двойным щелчком левой клавишей мыши на пиктограмме блока Scope. Порядок графических зависимостей в этом окне соответствует порядку подачи сигналов на входные зажимы осциллографа в направлении сверху вниз. В том случае, если на вход блока поступает векторный сигнал, например с выхода мультиплексора, то кривая для каждого сигнала строится отдельным цветом.
Замечание: во избежание недоразумений использовать осциллограф в режиме реального времени не рекомендуется. Графическое окно следует открывать по завершению моделирования.
Настройка окна осциллографа выполняется с помощью панелей инструментов (рис. П3.5).

Рис. П3.5. Панель инструментов блока Scope
Панель инструментов содержит одиннадцать кнопок:
1. Print – печать содержимого окна осциллографа;
2. Parameters – доступ к окну настройки параметров;
3. Zoom – увеличение масштаба по обеим осям;
4. Zoom X-axis – увеличение масштаба по горизонтальной оси;
5. Zoom Y-axis – увеличение масштаба по вертикальной оси;
6. Autoscale – автоматическая установка масштабов по обеим осям;
7. Save current axes settings – сохранение текущих настроек окна;
8. Restore saved axes settings – установка ранее сохраненных настроек окна;
9. Floating scope – перевод осциллографа в "свободный" режим;
10. Lock/Unlock axes selection – закрепить/разорвать связь между текущей координатной системой окна и отображаемым сигналом. Инструмент доступен только для режима Floating scope;
11. Signal selection – выбор сигналов для отображения. Инструмент доступен, если включен режим Floating scope.
Изменение масштабов отображаемых графиков можно выполнить несколькими способами:
1. Нажать соответствующую кнопку и/или щелкнуть один раз левой клавишей мыши в нужном месте графика. Произойдет 2,5 кратное увеличение масштаба.
2. Нажать соответствующую кнопку и/или, нажав левую клавишу мыши, с помощью динамической рамки или отрезка указать область графика для увеличенного изображения.
3. Щелкнуть правой клавишей мыши в окне графиков и, выбрать команду Axes properties… в контекстном меню. Откроется окно свойств графика, в котором с помощью параметров Y-min и Y-max можно указать предельные значения вертикальной оси. В этом же окне можно указать заголовок графика (Title), заменив выражение %<SignalLabel> в строке ввода.
Параметры блока устанавливаются в окне Scope parameters, которое открывается с помощью инструмента  (Parameters) панели инструментов. Окно параметров имеет две вкладки:
(Parameters) панели инструментов. Окно параметров имеет две вкладки:
· General – общие параметры;
· Data history – параметры сохранения сигналов в рабочей области Matlab.
Вкладка общих параметров показана на рис. П3.6.

Рис. П3.6. Вкладка настроек General общих параметров осциллографа
На вкладке General задаются следующие параметры:
1. Number of axes – число входов (систем координат) осциллографа. При изменении этого параметра на изображении блока появляются дополнительные входные порты.
2. Time range – величина временного интервала, для которого отображаются графики. Если время расчета модели превышает заданное параметром Time range, то вывод графика производится порциями, при этом интервал отображения каждой порции графика равен заданному значению Time range. Рекомендуется устанавливать равным Auto.
3. Tick labels – вывод/скрытие осей и меток осей. Может принимать три значения, выбираемые из списка:
• all – подписи для всех осей;
• none – отсутствие всех осей и подписей к ним;
• bottom axis only – подписи горизонтальной оси только для нижнего графика.
4. Sampling – установка параметров вывода графиков в окне. Задает режим вывода расчетных точек на экран. При выборе Decimation кратность вывода устанавливается числом, задающим шаг выводимых расчетных точек. В том случае, если режим вывода расчетных точек задается как Sample time, то его числовое значение определяет интервал квантования при отображении сигнала.
5. floating scope – флажок перевода осциллографа в свободный режим.
На рис. П3.7 показаны параметры вкладки Data history.

Рис. П3.7. Вкладка настроек осциллографа Data history
Возможна настройка следующих параметров:
1. Limit data points to last – максимальное количество отображаемых расчетных точек графика. При превышении этого числа начальная часть графика обрезается. Если флажок параметра Limit data points to last не установлен, то Simulink автоматически увеличит значение этого параметра для отображения всех расчетных точек.
2. Save data to workspace – флажок сохранение значений сигналов в рабочей области Matlab. При установленном флажке доступны следующие параметры:
3. Variable name – имя переменной для сохранения сигналов в рабочей области Matlab.
4. Format – формат данных при сохранении в рабочей области Matlab. Может принимать значения из списка:
• Array – массив,
• Structure – структура,
• Structure with time – структура с дополнительным полем "время".
При выполнении лабораторной работы рекомендуется не устанавливать флажок Limit data … и установить Save data …. данные, сохраненные в рабочей области, можно использовать для последующей обработки.
Следует помнить, что блок Scope требует значительного объема памяти для хранения отображаемых данных, что может привести к использованию компьютером виртуальной (дисковой) памяти и, как следствие, существенному замедлению расчетов.
Стандартная цветовая палитра осциллографа Scope предусматривает построение цветных графиков на черном фоне, что не удобно при документировании результатов, т.к. при распечатке отчета невозможно непосредственное использование копии окна.
Окно блока Scope, отображающее графики сигналов, имеет очень ограниченные возможности по изменению внешнего вида окна и графиков: команды изменения цветов линий и фона окна, толщины линий, размера и типа шрифтов и т.п. недоступны. Чтобы получить доступ к этим возможностям необходимо в основном окне Matlab ввести следующие команды:
set(0,'ShowHiddenHandles','On')
set(gcf,'menubar','figure')
Эту последовательность команд удобнее оформить в виде m-файла и запускать его на выполнение перед началом моделирования.
После выполнения указанных команд в окне блока Scope появится меню File-Edit-View-Insert-Desktop-Window-Help, показанное на рис. П3.8.
 |
Теперь после проведения расчетов и получения осциллограмм можно открыть окно блока Scope и, изменяя по своему усмотрению настройки Figure Properties, Axes Properties, Current Object Properties команды Edit, привести осциллограммы в надлежащий вид (см. например рис. 20).
7. Дисплей. Блок Display отображает значение сигнала в виде числа. Параметры блока:
1. Format – формат отображения данных. Может принимать следующие значения:
· short – 5 значащих десятичных цифр.
· long – 15 значащих десятичных цифр.
· short_e –5 значащих десятичных цифр и 3 символа степени десяти.
· long_e – 15 значащих десятичных цифр и 3 символа степени десяти.
· bank – денежный формат с фиксированной точкой и двумя десятичными цифрами в дробной части числа.
2. Decimation – кратность отображения входного сигнала. При Decimation = 1 отображается каждое значение входного сигнала, при Decimation = 2 отображается каждое второе значение и т.д.
3. Sample time – шаг модельного времени. Определяет дискретность отображения данных.
4. Floating display – флажок перевода блока в "свободный" режим. В данном режиме входной порт блока отсутствует, а выбор сигнала для отображения выполняется щелчком левой клавиши мыши на соответствующей лини связи.
Блок Display может использоваться для отображения не только скалярных сигналов, но также векторных, матричных и комплексных. Если все отображаемые значения не могут поместиться в окне блока, в правом нижнем углу блока появляется символ ▼, указывающий на необходимость увеличить размеры блока по вертикали.
В модели, приведенной на рис. 17 используется пять блоков Display. С их помощью определяются: Display1 – амплитуда и начальная фаза первой гармоники тока источника; Display2 – действующее значение тока тиристора; Display3 – среднее значение напряжения на выходе выпрямителя; Display4 – среднее значение тока тиристора; Display5 – среднее значение тока на выходе выпрямителя.
Литература
1. Однофазные управляемые выпрямители: метод. указания к лабораторной работе / Сост. Н.М. Лазарева, В.М. Яров; Чуваш. ун-т. Чебоксары, 2010. 40 с.
2. Черных И.В. Моделирование электротехнических устройств в MATLAB, SimPowerSystems и Simulink. – М.: ДМК Пресс; СПб.: Питер, 2008. –288 с.
3. Герман-Галкин. С.Г. Силовая электроника: Лабораторные работы ПК. – СПб.: КОРОНА принт, 2002. –304 с.
Лабораторная работа №2
Исследование трехфазных управляемых выпрямителей.
Цель работы
Исследование электромагнитных процессов и характеристик выпрямителей, выполненных по трехфазной схеме с нулевым выводом и трехфазной мостовой схеме, при работе на активно-индуктивную нагрузку с противо-ЭДС в режиме непрерывного тока.
Задание и методические указания
1. Предварительное домашнее задание:
а) изучить темы курса: «Многофазные выпрямители», «Управляемые выпрямители», «Непрерывный режим» [1, с. 301–323; 2, с. 20–44], содержание данной работы и быть готовым ответить на все контрольные вопросы;
б) рассчитать угол коммутации γ для заданного варианта. Угол γ рекомендуется определить из соотношения
в) построить в масштабе друг под другом временные диаграммы вторичных ЭДС, выпрямленного напряжения ud, тока нагрузки id, тока вентиля i a, напряжения на вентиле ua и первичного тока трансформатора i 1 с учетом заданных значений E 2, a1, Id и рассчитанного γ;
г) рассчитать среднее значение выпрямленного напряжения Ud, тока вентиля Ia, действующие значения первичного I 1 и вторичного I 2 токов трансформатора для заданного значения тока нагрузки Id. Среднее значение выпрямленного напряжения Udпри заданном значении угла управления a и тока нагрузки Idможно определить из уравнения внешней характеристики для непрерывного режима.
2. Экспериментальное исследование трехфазной мостовой схемы выпрямления при работе на активно-индуктивную нагрузку с ПЭДС:
а) собрать схему в Simulink для исследования трехфазной мостовой схемы при работе на активно-индуктивную нагрузку.
б) снять осциллограммы анодного тока iα и анодного напряжения ua при помощи осциллографа.
в) снять осциллограммы выпрямленного напряжения ud и тока id.
г) с помощью измерительных приборов сделать замеры среднего значения анодного тока Iα, выпрямленного напряжения Ud и первичного тока I1 трансформатора для заданного тока нагрузки Id и угла α1. Замерить вторичное напряжение U2 при Id = 0. Сравнить полученные значения с расчетными;
д) снять регулировочные характеристики выпрямителя Ud = F (α) при двух значениях тока нагрузки (номинальном и половине номинального).
е) снять внешние характеристики Ud = F (Id) при заданном значении a1 и при α2 = α1+15°.
3. Экспериментальное исследование трехфазной схемы выпрямления с нулевым выводом при работе на активно-индуктивную нагрузку с ПЭДС:
а) собрать схему для исследования трехфазной нулевой схемы при работе на активно-индуктивную нагрузку с ПЭДС.
б) повторить пункты 2 б, в, г, д, е для трехфазной схемы выпрямления с нулевым выводом.
Содержание отчета
Отчет должен содержать следующие пункты:
а) наименование и цель работы;
б) предварительные расчеты и построения;
в) исходные данные, принципиальную силовую схему;
г) обработанные осциллограммы;
д) результаты экспериментальных исследований и проведенных по ним расчетов, помещенные в соответствующие таблицы;
е) экспериментально снятые и построенные характеристики;
ж) сравнение соответствующих осциллограмм для разных схем выпрямления и объяснение их различий;
з) сравнение расчетных и экспериментальных значений токов и напряжений. Объяснить причины их расхождения;
и) сравнение регулировочных характеристик для разных схем. Указать различие и сходство;
к) выводы по работе:
– объяснить влияние на внешние характеристики и угол коммутации анодной индуктивности Lα, угла α и схемы выпрямления;
– объяснить, почему величина тока в непрерывном режиме влияет на положение регулировочной характеристики.
Контрольные вопросы
1. Назовите основные трехфазные схемы выпрямления.
2. Назовите основные величины, используемые при описании работы выпрямителей.
3. По каким признакам классифицируются выпрямители?
4. Как изменяется соотношение между приведенным индуктивным сопротивлением рассеяния трансформатора и приведенным активным сопротивлением обмоток при изменении мощности трансформатора?
5. Какова частота пульсации в изучаемых схемах?
6. Что такое непрерывный режим?
7. Что такое внешняя характеристика? От каких параметров зависит ее положение в непрерывном режиме?
8. Что такое регулировочная характеристика, от каких параметров зависит ее вид?
9. Сравнить трехфазную нулевую и трехфазную мостовую схемы по основным показателям.
10. Сравнить форму токов ia и i2 для трехфазной нулевой схемы при xd = ∞. Почему отличаются формулы для Ia и I2?
11. Будут ли отличаться осциллограммы, снятые в лабораторной работе, от временных диаграмм? Почему?
12. Что влияет на величину граничного тока?
Лабораторная работа №3
Исследование широтно-импульсного преобразователя.
Цель работы: Исследование регулировочной и энергетических характеристик мостового широтно-импульсного преобразователя (ШИП) с симметричным законом управления при работе на активно-индуктивную нагрузку с противо-э.д.с.
1. Указания к выполнению работы
Широтно-импульсные преобразователи (ШИП) связывают источник постоянного тока с двигателем постоянного тока. Они должны обладать следующими свойствами:
•двусторонней проводимостью энергии между источником питания и исполнительным двигателем, являющимся нагрузкой преобразователя, для обеспечения его работы во всех квадрантах механической характеристики;
•малым и не зависящим от тока выходным сопротивлением для получения механических характеристик, близких к естественным, и, в конечном счете, для получения хороших статических и динамических характеристик электропривода;
•жесткой внешней характеристикой и малой инерционностью, высоким КПД, достаточной перегрузочной способностью для обеспечения необходимых форсировок в переходных режимах работы привода;
•высокой помехозащищенностью и надежностью, малой массой и габаритами, отсутствием влияния на сеть.

Рис.5.1
В области коммутируемых токов более 50 А основными приборами силовой электроники являются силовые модули на базе IGBT (Insulated Gate Bipolar Transistors) транзисторов. В настоящее время IGBT обеспечивают коммутацию токов до 1800 А и напряжении до 4,5 кВ.
Упрощенная принципиальная схема ШИП представлена на рис.5.1. Она содержит четыре транзисторных ключа ТК1-ТК4. В диагональ моста образованного транзисторными ключами включена нагрузка, эквивалентная двигателю постоянного тока с регулированием по цепи якоря.
Наиболее простой способ управления ШИП по цепи якоря - симметричный, когда в состоянии переключения находятся все четыре транзистора моста, а напряжение на выходе ШИП представляет собой знакопеременные импульсы, длительность которых регулируется входным сигналом. Преимуществом симметричного метода управленияявляется простота реализации и отсутствие зоны нечувствительности в регулировочной характеристике. К недостаткам относят двухполярное напряжение на нагрузке и связанные с этим повышенные пульсации тока нагрузки.
Временные диаграммы ШИП при симметричном способе управления приведены на рис.2.5.2. При включении диагонали моста VTl, VT4и выключении VT2, VT3 образуется цепь

Рис.5.2

Рис.5.3

Рис.5.4
+ Uп,VТ1,Rн,Lн,E,VT4,-Uп для протекания тока нагрузки.
К нагрузке в этом интервале прикладывается напряжение Uп, а ток увеличивается от Imin до Imах. На транзисторах VT2, VT3 напряжение равно Un. Это напряжение является отрицательным для диодов VD2, VD3, и ток через них равен 0. При включении диагонали VT2, VT3 и выключении VT1, VT4 ток, поддерживаемый индуктивностью нагрузки, продолжает протекать в том же направлении по цепи -Un,VD2,Rн,Lн,E,VD3,+Un, в которой ток нагрузки протекает навстречу э.д.с. и источнику питания. На этом интервале напряжение на нагрузке изменяет знак, а ток уменьшается.
Обобщенная функциональная схема управления транзисторным ШИП изображена на рис.5.3. Генератор пилообразного напряжения (ГПН), тактируемый генератором импульсов (Г), вырабатывает пилообразное напряжение. Схема сравнения (СС) представляет собой релейный элемент, который переключается с плюса на минус и обратно, в момент равенства Uгпн =Uупр. Для управления ШИП распределитель импульсов (РИ) имеет
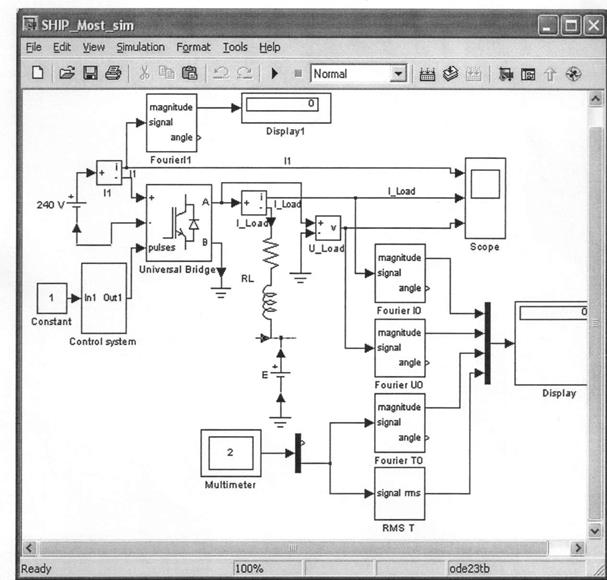
Рис.5.5
прямой и инверсные выхода. Эти импульсы, усиленные усилителем (У), поступают на базы транзисторов диагоналей моста в противофазе (рис.5.4).
2. Описание виртуальной лабораторной установки
Виртуальная лабораторная установка для исследований показана на рис.5.5, она содержит:
•источник постоянного напряжения (240 В); •активно-индуктивную нагрузку с противо-э.д.с.(R,L), (Е);
•измерители мгновенных токов в источнике питания (I 1) и нагрузке (I _load);
•измеритель мгновенного напряжения на нагрузке (U _load);
•блоки измерения средних значений тока питания (Fourier I1), тока нагрузки (Fourier I0) и тока силового полупроводникового модуля (Fourier 7Ю);
•блок для измерения среднего значения напряжения на нагрузке (Fourier U0);
•блок для измерения действующего тока силового полупроводникового модуля (RMC T)
•блок для наблюдения мгновенных значений тока в цепи питания, тока нагрузки и напряжения на нагрузке (Scope)\
•блок для наблюдения и измерения мгновенных значений величин, которые выбраны в поле Measurement соответствующих блоков (Multimeter)',
•блок измерения среднего значения тока цепи питания (Display 1);

Рис.5.6
•блок для измерения величин средних значений тока и напряжения на нагрузке, а также среднего и действующего тока в силовом полупроводниковом модуле (Display);
•однофазный мостовой транзисторный ШИП рис.5.6 (Universal Bridge)',
•блок управления ШИП (Control System).
В полях блока Universal Bridge, кроме уже знакомых параметров, вводятся:
•динамическое сопротивление полупроводникового модуля в омах (Ron, Ohms)\
•пороговое напряжение на транзисторе и на диоде модуля в открытом состоянии в вольтах (Forward Voltage,V);
•время спада и время затягивания выключения (Tf, Tt) в секундах.
Модель блока управления (Control system) показана на рис.5.7. Блок Repeating Sequence является ГПН. Параметры этого ГПН задаются в окне параметров рис.5.8:
•амплитуда пилообразного напряжения 2 В;
•период пилообразного напряжения Tq = 0,002с. (fо = 500Гц).
Для реализации активно- индуктивной нагрузки устанавливаем R = 10(Ohms), L = 20e-4(H).
В окнах настройки параметров блоков Fourier II, Fourier I0, Fourier U0, Fourier 70 устанавливается частота равная частоте ГПН (500 Гц), и номер 0 гармоники. Для блока RMS Т указывается только частота (500 Гц).
3. Порядок проведения лабораторной работы

Рис.2.5.7

Рис.5.8
3.1 Параметры моделирования задаются на вкладке Simulation/Simulation Parameters/Solver рис.5.9. При снятии характеристик параметры R,L нагрузки остаются без изменений, изменяется напряжение управления от -2В до 2В с шагом 0,5В. Характеристики снимаются для трех значений э.д.с. нагрузки 0, 100, 200В. При этом моделирование проводится для
каждого значения напряжения управления и э.д.с. Результаты моделирования и последующих расчетов заносятся в таблицы 2.5.1, 2.5.2.
Таблица 5.1
| Данные | Измерения | |||||||
| Uу | Е | Iн | Uн | I1 | IТ | IT(RMS) | UTmax | ITmax |
| В | В | А | В | А | А | А | В | А |
Таблица 5.2
| Вычисления | |||
| γ | P | PT | Pн |
| Вт | Вт | Вт | |
Средний ток в источнике питания определяется по показаниям Display 1. На блоке Display измеряемые величины представлены в следующей последовательности: средний ток нагрузки; среднее напряжение на нагрузке; средний ток в силовом модуле; действующий ток в модуле. Мгновенные значения тока питания, нагрузки и напряжения на нагрузке можно наблюдать на экране осциллоскопа. Для одного из расчетов представить эти зависимости (экран осциллоскопа) в отчете. В графическом окне блока Multimeter наблюдаются и определяются максимальные напряжение (UTmax) и ток (ITmax) силового полупроводникового модуля.
Относительная продолжительность импульса напряжения на нагрузке определяется по формуле:
γ=tи/T0,
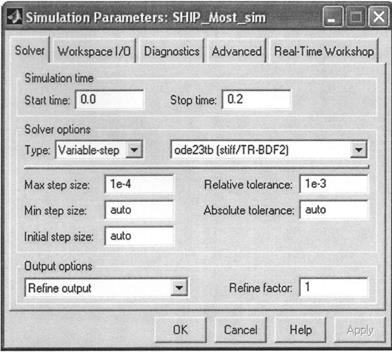
Рис.5.9
где Tо - период напряжения ГПН, а tи определяется по осциллограмме U_load на оси абсцисс (при напряжении 0В).
Мощность в цепи источника питания рассчитывается по выражению:
P 1 =U п I 1(Вт),
где Un - напряжение питания.
Квазистатические потери в силовом модуле рассчитываются по уравнению:
Р = [γUf + (1 - γ)U fd ] IТ+ Ron [IT (RMS]2,
где U f, U fd, Ron - параметры силового модуля. Мощность в нагрузке определяется по выражению:
P Н =U Н I Н(Вт).
3.2 По результатам таблиц 5.1, 5.2 строятся: •регулировочная характеристика ШИП UH = f (γ);
•энергетические характеристики ШИП P1,PТ =f ( P н), I1,I Т (RMS), IT,ITmax=f(IН).
4. Содержание отчета
4.1 Схема установки рис.2.5.1.
4.2 Выражения для расчета основных характеристик.
4.3 Энергетические характеристики.
4.4 Регулировочная характеристика, таблицы 2.5.1, 2.5.2
4.5 Осциллограммы мгновенных напряжений и токов.
4.6 Выводы по работе.
5. Контрольные вопросы
5.1 Дайте сравнительную характеристику симметричному, несимметричному и поочередному способам управления ШИП.
5.2 Выполните анализ энергетических характеристик ШИП.
5.3 Выполните анализ регулировочной характеристики.
5.4 Объясните принцип работы системы управления ШИП.
6. Литература
6.1 Герман-Галкин С.Г. Силовая электроника: Лабораторные работы на ПК.- СПб.: Учитель и ученик, Корона принт, 2002. - 304с.
6.2 Дьяконов В. MatLab. Анализ, идентификация и моделирование систем. Специальный справочник. - СПб.: Питер, 2002. - 448 с.
Лабораторная работа № 4
Широтно-импульсный преобразователь – устройство импульсного управления двигателем постоянного тока
Цель работы: изучение и исследование устройств импульсног
|
|
|
