 |


Частотные критерии устойчивости.
|
|
|
|
№50
В критерии Михайлова угол поворота вектора  , определяющего годограф Михайлова, при изменении
, определяющего годограф Михайлова, при изменении  в пределах
в пределах  составляет:
составляет:
1.  2.
2.  3.
3.  4.
4.  .
.
№51
В критерии Михайлова угол поворота вектора , определяющего годограф Михайлова, при изменении в пределах  составляет:
составляет:
1. 2.  3. 4. .
3. 4. .
№52
Годограф Михайлова – это:
1. Характеристический многочлен системы с подстановкой  .
.
2. Передаточная функция замкнутой системы с подстановкой .
3. Передаточная функция разомкнутой системы с подстановкой .
4. Числитель передаточной функции замкнутой системы с подстановкой .
.№53
Годограф Михайлова при  :
:
1. Стремится к началу координат.
2. Стремится к некоторой точке, отличной от начала координат.
3. Стремится к некоторой асимптоте, отличной от координатных осей.
4. Стремится к одной из координатных осей.
№54
Устойчивая система 2-го порядка при имеет годограф Михайлова следующего вида:
 1
1
№55
Устойчивая система 3-го порядка при имеет годограф Михайлова следующего вида:
 3
3
№56
Устойчивая система 4-го порядка при имеет годограф Михайлова следующего вида:
 4
4
№57
Критерий устойчивости Найквиста оперирует с:
1. Характеристическим многочленом замкнутой системы с подстановкой .
2. Передаточной функцией замкнутой системы с подстановкой .
3. Передаточной функцией разомкнутой системы с подстановкой .
4. Числителем передаточной функции замкнутой системы с подстановкой .
№58
Если замкнутая система находится на границе устойчивости, то годограф частотной характеристики разомкнутой системы  при некотором значении проходит на плоскости «
при некотором значении проходит на плоскости « » через точку:
» через точку:
1.  2.
2.  3.
3.  4.
4.  .
.
№59
Если разомкнутая система устойчива, то для устойчивости замкнутой системы годограф вектора АФЧХ разомкнутой САУ при изменении в пределах должен:
|
|
|
1. Не охватывать начало координат плоскости «».
2. Не охватывать точку плоскости «».
3. Не охватывать  плоскости «».
плоскости «».
4. Охватывать начало координат плоскости «» ровно один раз.
№60
Передаточная функция разомкнутой системы -  . Порядок системы -
. Порядок системы -  . Вектор
. Вектор  определяется выражением:
определяется выражением:  . Разомкнутая система устойчива. В этом случае необходимым и достаточным условием устойчивости замкнутой системы является выполнение условия:
. Разомкнутая система устойчива. В этом случае необходимым и достаточным условием устойчивости замкнутой системы является выполнение условия:
1.  3.
3. 
2.  4.
4.  .
.
№61
Передаточная функция разомкнутой системы - . Порядок системы - . Вектор определяется выражением: . Разомкнутая система имеет  неустойчивых корней. В этом случае необходимым и достаточным условием устойчивости замкнутой системы является выполнение условия:
неустойчивых корней. В этом случае необходимым и достаточным условием устойчивости замкнутой системы является выполнение условия:
1.  3.
3. 
2.  4.
4.  .
.
№62
Передаточная функция разомкнутой системы - . Порядок системы - . Вектор определяется выражением: . Разомкнутая система устойчива. В этом случае необходимым и достаточным условием устойчивости замкнутой системы является выполнение условия:
1.  3.
3. 
2.  4.
4.  .
.
№63
Передаточная функция разомкнутой системы - . Порядок системы - . Вектор определяется выражением: . Разомкнутая система имеет неустойчивых корней. В этом случае необходимым и достаточным условием устойчивости замкнутой системы является выполнение условия:
1.  3.
3. 
2.  4.
4.  .
.
№64
Пусть - передаточная функция разомкнутой САУ,  - передаточная функция замкнутой САУ по задающему воздействию. В формулировке критерия Найквиста участвует величина
- передаточная функция замкнутой САУ по задающему воздействию. В формулировке критерия Найквиста участвует величина  . Здесь определяется выражением:
. Здесь определяется выражением:
1.  3.
3. 
2. 4.  .
.
№65
Система в разомкнутом состоянии устойчива. Годограф Найквиста  , соответствующий устойчивой замкнутой системе, имеет вид:
, соответствующий устойчивой замкнутой системе, имеет вид:
 2
2
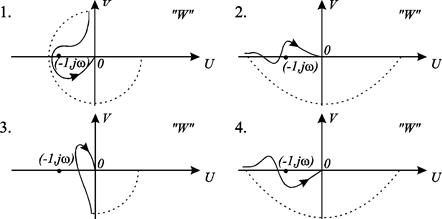
№66
Система в разомкнутом состоянии имеет два неустойчивых корня. Годограф Найквиста , соответствующий устойчивой замкнутой системе, имеет вид:
|
|
|
 4
4
№67
Система в разомкнутом состоянии устойчива. Годограф Найквиста , соответствующий устойчивой замкнутой системе, имеет вид:
 3
3
№68
Система в разомкнутом состоянии имеет два неустойчивых корня. Годограф Найквиста , соответствующий устойчивой замкнутой системе, имеет вид:
4
№69
При использовании критерия Найквиста для систем с астатизмом порядка  годограф дополняется:
годограф дополняется:
1. Точками дуги бесконечно большого радиуса, проходящими путь, соответствующий повороту на угол  .
.
2. Точками дуги бесконечно большого радиуса, проходящими путь, соответствующий повороту на угол  .
.
3. Точками дуги бесконечно большого радиуса, проходящими путь, соответствующий повороту на угол  .
.
4. Точками дуги бесконечно большого радиуса, проходящими путь, соответствующий повороту на угол  .
.
№70
Разомкнутая система имеет астатизм 2-го порядка и не имеет корней характеристического уравнения в правой полуплоскости плоскости « ». Годограф Найквиста , соответствующий системе, устойчивой в замкнутом состоянии, имеет вид:
». Годограф Найквиста , соответствующий системе, устойчивой в замкнутом состоянии, имеет вид:
 4
4
№71
Разомкнутая система имеет астатизм 2-го порядка и имеет один корень характеристического уравнения в правой полуплоскости плоскости «». Годограф Найквиста , соответствующий системе, устойчивой в замкнутом состоянии, имеет вид:
 2
2
5. Такого годографа среди представленных нет.
№72
Обозначим  - ЛАЧХ разомкнутой системы. При интерпретации критерия Найквиста для ЛАФЧХ положительные и отрицательные переходы определяются в интервале частот:
- ЛАЧХ разомкнутой системы. При интерпретации критерия Найквиста для ЛАФЧХ положительные и отрицательные переходы определяются в интервале частот:
1. При которых  .
.
2. При которых  .
.
3. При которых  .
.
4. При которых  .
.
№73
При оценке устойчивости по числу переходов годографа Найквиста через отрезок  формула, выражающая критерий Найквиста, имеет вид ( - число неустойчивых корней разомкнутой системы):
формула, выражающая критерий Найквиста, имеет вид ( - число неустойчивых корней разомкнутой системы):
1.  3.
3. 
2.  4.
4.  .
.
№74
Система устойчива в разомкнутом состоянии. Системе, устойчивой в замкнутом состоянии соответствуют ЛАФЧХ разомкнутой системы вида:
 4
4
№75
На частоте среза ЛФЧХ разомкнутой системы равна  . Запас устойчивости по фазе равен:
. Запас устойчивости по фазе равен:
1.  2.
2.  3.
3.  4.
4.  .
.
Точность
№1
Передаточная функция разомкнутой САУ имеет вид:  . Входной сигнал
. Входной сигнал  . Выходная величина -
. Выходная величина -  , ошибка системы:
, ошибка системы:  . Чему равна установившаяся ошибка системы
. Чему равна установившаяся ошибка системы
|
|
|
1. 1/3 3. 
2. 1 4. 0.
№2
Передаточная функция разомкнутой САУ имеет вид:  . Входной сигнал
. Входной сигнал  . Выходная величина - , ошибка системы: . Чему равна установившаяся ошибка системы
. Выходная величина - , ошибка системы: . Чему равна установившаяся ошибка системы
1. 2 3.
2. 4 4. 0.
№3
Передаточная функция разомкнутой САУ имеет вид: . Входной сигнал  . Выходная величина - , ошибка системы: . Чему равна установившаяся ошибка системы
. Выходная величина - , ошибка системы: . Чему равна установившаяся ошибка системы
1. 2,5 3.
2. 0 4.  .
.
№4
Передаточная функция разомкнутой САУ имеет вид:  . Входной сигнал
. Входной сигнал  . Выходная величина - , ошибка системы: . Чему равна установившаяся ошибка системы
. Выходная величина - , ошибка системы: . Чему равна установившаяся ошибка системы
1. 3. 18
2. 0 4. 1,5.
№5
Передаточная функция разомкнутой САУ имеет вид: . Входной сигнал . Выходная величина - , ошибка системы: . Чему равна установившаяся ошибка системы
1. 1/3 3.
2. 1 4. 0.
№6
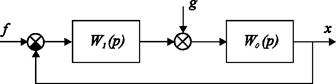
Структурная схема системы имеет вид:
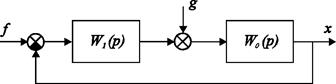
Входной сигнал  , возмущающее воздействие
, возмущающее воздействие  . Составляющая установившейся ошибки
. Составляющая установившейся ошибки  , определяемая входным сигналом, задается выражением:
, определяемая входным сигналом, задается выражением:
1.  3.
3. 
2.  4.
4.  .
.
№7
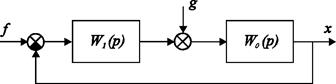
Структурная схема системы имеет вид:
Входной сигнал , возмущающее воздействие  . Составляющая установившейся ошибки
. Составляющая установившейся ошибки  , определяемая возмущающим воздействием, задается выражением:
, определяемая возмущающим воздействием, задается выражением:
1.  3.
3. 
2.  4.
4.  .
.
№8
Структурная схема системы имеет вид:
Входной сигнал , возмущающее воздействие . Установившаяся ошибка системы  определяется выражением:
определяется выражением:
1.  3.
3. 
2.  4.
4.  .
.
№9
Передаточная функция разомкнутой системы имеет вид:  . Входной сигнал . Установившаяся ошибка замкнутой САУ с единичной обратной связью определяется выражением:
. Входной сигнал . Установившаяся ошибка замкнутой САУ с единичной обратной связью определяется выражением:
1.  3.
3. 
2.  4.
4.  .
.
№10
Передаточная функция разомкнутой системы имеет вид:  . Входной сигнал . Установившаяся ошибка замкнутой САУ с единичной обратной связью определяется выражением:
. Входной сигнал . Установившаяся ошибка замкнутой САУ с единичной обратной связью определяется выражением:
1. 3. 2. 4. .
№11
Передаточная функция разомкнутой системы имеет вид: . Входной сигнал и требуется, чтобы установившаяся ошибка не превышала величину  . При этом на величину
. При этом на величину  накладывается условие:
накладывается условие:
1.  3.
3. 
2.  4.
4.  .
.
№12
Передаточная функция разомкнутой системы имеет вид:  . Входной сигнал
. Входной сигнал  . Установившаяся ошибка замкнутой САУ с единичной обратной связью определяется выражением:
. Установившаяся ошибка замкнутой САУ с единичной обратной связью определяется выражением:
|
|
|
1.  3.
3. 
2.  4.
4.  .
.
№13
Передаточная функция разомкнутой системы имеет вид: . Входной сигнал . Установившаяся ошибка замкнутой САУ с единичной обратной связью определяется выражением:
1. 3.
2. 4. .
№14
Передаточная функция разомкнутой системы имеет вид: . Входной сигнал и требуется, чтобы установившаяся ошибка не превышала величину . При этом на величину накладывается условие:
1.  3.
3. 
2.  4.
4.  .
.
№15
Структурная схема системы имеет вид:
Передаточные функции определяются выражениями:  ,
,  . Входной сигнал , возмущающее воздействие . Составляющая установившейся ошибки , определяемая возмущающим воздействием, задается выражением:
. Входной сигнал , возмущающее воздействие . Составляющая установившейся ошибки , определяемая возмущающим воздействием, задается выражением:
1.  3.
3.  2.
2.  4.
4.  .
.
№16
Структурная схема системы имеет вид:
Передаточные функции определяются выражениями:  ,
,  . Входной сигнал , возмущающее воздействие . Составляющая установившейся ошибки , определяемая возмущающим воздействием, задается выражением:
. Входной сигнал , возмущающее воздействие . Составляющая установившейся ошибки , определяемая возмущающим воздействием, задается выражением:
1. 3. 2.  4. .
4. .
№17
Передаточная функция разомкнутой системы . Входной сигнал  . Приближенная формула для определения амплитуды
. Приближенная формула для определения амплитуды  сигнала ошибки имеет вид:
сигнала ошибки имеет вид:
1.  3.
3. 
2.  4.
4.  .
.
№18
Передаточная функция разомкнутой системы . Входной сигнал . Амплитуда ошибки не превышает величины  при выполнении условия:
при выполнении условия:
1.  3.
3. 
2.  4.
4.  .
.
№19
Передаточная функция замкнутой системы по входному воздействию - , Передаточная функция замкнутой системы по ошибке -  . Коэффициенты ошибок определяются зависимостью:
. Коэффициенты ошибок определяются зависимостью:
1.  3.
3. 
2.  4.
4.  .
.
№20
Передаточная функция разомкнутой САУ имеет вид:  . Входной сигнал
. Входной сигнал  . Выходная величина - , ошибка системы: . Чему равна установившаяся ошибка замкнутой системы
. Выходная величина - , ошибка системы: . Чему равна установившаяся ошибка замкнутой системы
1. 15 3. 3
2. 0 4. 60.
№21
Передаточная функция разомкнутой САУ имеет вид:  . Входной сигнал . Выходная величина - , ошибка системы: . Чему равна установившаяся ошибка замкнутой системы
. Входной сигнал . Выходная величина - , ошибка системы: . Чему равна установившаяся ошибка замкнутой системы
1. 1 3.
2. 0 4. 36.
№22
Передаточная функция разомкнутой САУ имеет вид:  . Входной сигнал . Выходная величина - , ошибка системы: . Чему равна установившаяся ошибка системы
. Входной сигнал . Выходная величина - , ошибка системы: . Чему равна установившаяся ошибка системы
1. 3. 36
2. 0 4. 1.
№23
Передаточная функция разомкнутой САУ имеет вид:  . Входной сигнал
. Входной сигнал  . Выходная величина - , ошибка системы: . Чему равна установившаяся ошибка замкнутой системы
. Выходная величина - , ошибка системы: . Чему равна установившаяся ошибка замкнутой системы
1. 4 3.
2. 0 4. 2,5.
Вынужденные процессы.
№24
Передаточная функция разомкнутой САУ имеет вид:  . Входной сигнал
. Входной сигнал  . Вынужденный процесс на выходе замкнутой системы имеет вид:
. Вынужденный процесс на выходе замкнутой системы имеет вид:
1. 
2. 
3. 
4.  В ответах 1-4
В ответах 1-4  - некоторые числа.
- некоторые числа.
№25
Передаточная функция разомкнутой системы имеет вид  . Входной сигнал
. Входной сигнал  . Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
. Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
1. 
2.
3. 
4. В ответах 1-4 - некоторые числа.
|
|
|
№26
Передаточная функция разомкнутой системы имеет вид  . Входной сигнал
. Входной сигнал  . Какой из зависимостей определяется вид вынужденного движения замкнутой системы:
. Какой из зависимостей определяется вид вынужденного движения замкнутой системы:
1. 2+ 
2. 2
3.
4. 12
№27
Передаточная функция замкнутой системы по ошибке имеет вид  . Коэффициент ошибки
. Коэффициент ошибки  равен:
равен:
1. 5 3. 0,2
2. 1 4. 0,16.
№28
Передаточная функция замкнутой системы по ошибке имеет вид  . Коэффициент ошибки
. Коэффициент ошибки  равен:
равен:
1. 0,016 3. -0,2
2. 0,2 4. 5.
№29
Передаточная функция замкнутой системы по ошибке имеет вид  . Коэффициент ошибки равен:
. Коэффициент ошибки равен:
1. 0,16 3. 2
2. 2 4. 0,5.
№30
Передаточная функция разомкнутой системы имеет вид  . Входной сигнал
. Входной сигнал  . Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
. Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
1. 
2. 
3. 
4.  . В ответах 1-4 - некоторые числа.
. В ответах 1-4 - некоторые числа.
№31
Передаточная функция разомкнутой системы имеет вид  . Входной сигнал:
. Входной сигнал:  . Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
. Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
1. 
2. 
3. 
4.  . В ответах 1-4
. В ответах 1-4  - некоторые числа.
- некоторые числа.
№32
Передаточная функция разомкнутой системы имеет вид  . Входной сигнал:
. Входной сигнал:  . Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
. Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
1. 
2. 
3. 
4.  . В ответах 1-4 - некоторые числа.
. В ответах 1-4 - некоторые числа.
№33
Передаточная функция разомкнутой системы имеет вид  . Входной сигнал:
. Входной сигнал:  . Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
. Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
1. 
2. 
3. 
4. . В ответах 1-4  - некоторые числа.
- некоторые числа.
№34
Передаточная функция разомкнутой системы имеет вид . Входной сигнал:  . Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
. Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
1.
2.
3. 
4.  . В ответах 1-4 - некоторые числа.
. В ответах 1-4 - некоторые числа.
№35
Передаточная функция разомкнутой системы имеет вид  . Входной сигнал:
. Входной сигнал:  . Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
. Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
1.
2. 
3. 
4.  . В ответах 1-4 - некоторые числа.
. В ответах 1-4 - некоторые числа.
№36
Передаточная функция разомкнутой системы имеет вид  . Входной сигнал:
. Входной сигнал:  . Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
. Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
1.
2. 
3. 
4.  . В ответах 1-4
. В ответах 1-4  - некоторые числа
- некоторые числа
№37
Передаточная функция разомкнутой системы имеет вид  . Входной сигнал: . Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
. Входной сигнал: . Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
1.  3.
3. 
2.  4.
4.  .
.
№38
Передаточная функция разомкнутой системы имеет вид  . Входной сигнал:
. Входной сигнал:  . Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
. Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
1.  3.
3.  ?
?
2.  4.
4.  .
.
№39
Входной сигнал:  . АФЧХ замкнутой системы на частоте
. АФЧХ замкнутой системы на частоте  имеют значения: АЧХ=3, ФЧХ=
имеют значения: АЧХ=3, ФЧХ=  . Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
. Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
1.  3.
3. 
2.  4.
4.  .
.
№40
Входной сигнал:  . АФЧХ замкнутой системы на частоте
. АФЧХ замкнутой системы на частоте  имеют значения: АЧХ=2, ФЧХ=
имеют значения: АЧХ=2, ФЧХ=  . Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
. Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
1.  3.
3. 
2.  4.
4.  .
.
№41
Входной сигнал:  . АФЧХ замкнутой системы на частоте
. АФЧХ замкнутой системы на частоте  имеют значения: АЧХ=5, ФЧХ= . Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
имеют значения: АЧХ=5, ФЧХ= . Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
1.  3.
3. 
2.  4.
4.  .
.
№42
Входной сигнал:  . АФЧХ замкнутой системы на частоте
. АФЧХ замкнутой системы на частоте  имеют значения: АЧХ=2, ФЧХ=
имеют значения: АЧХ=2, ФЧХ=  . Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
. Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
1.  3.
3. 
2.  4.
4.  .
.
№43
Входной сигнал:  . АФЧХ замкнутой системы на частоте имеют значения: АЧХ=3, ФЧХ=
. АФЧХ замкнутой системы на частоте имеют значения: АЧХ=3, ФЧХ=  . Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
. Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
1.  3.
3. 
2.  4.
4.  .
.
№44
Входной сигнал:  . АФЧХ замкнутой системы на частоте имеют значения: АЧХ=4, ФЧХ= . Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
. АФЧХ замкнутой системы на частоте имеют значения: АЧХ=4, ФЧХ= . Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
1.  3.
3. 
2.  4.
4.  .
.
№45
Передаточная функция разомкнутой системы имеет вид  . Входной сигнал: . Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
. Входной сигнал: . Какой из зависимостей определяется общий вид вынужденного движения замкнутой системы:
1. 3. 
2.  4.
4.  .
.
№46
Вынужденный процесс в САУ при полиномиальном входном воздействии представляет собой:
1. Полином степени, меньшей, чем входной сигнал.
2. Полином степени, большей, чем входной сигнал.
3. Постоянную величину.
4. Полином той же степени, что и входной сигнал.
|
|
|
