 |


III. Порядок выполнения работы
|
|
|
|
III. Порядок выполнения работы
А. Определение запаса устойчивости следящего измерителя.
- 3. 1 В следящей системе включить интегратор формирующих фильтров Винера-Кальмана и собрать фильтр следящей системы с передаточной характеристикой  .
.
Подать на вход замкнутой следящей системы сигнал «Step» и при К1=0, 1 убедиться в ее устойчивой работе. Затем путем расширения полосы пропускания систем за счет увеличения ее К1 (К1=0, 01; 0, 1; 1, 0; 10, 0 …) добиться возбуждения следящей системы и зарисовать эпюры Scope2 (Фиг. 1).

Фиг. 1
По указанию преподавателя
- 3. 2 Ввести следящую систему в устойчивое состояние (К1=0, 1) и путем изменения (увеличения) фильтра добиться возбуждения следящей системы.
Б. Определение динамических и флуктуационных ошибок следящего радиолокационного измерителя.
- 3. 3 Ввести в следящую систему в устойчивое состояние (К1=0, 1) и подать на ее вход сигнал «Ramp». Путем изменения К1 (К1=0, 1; 0, 5; 1, 0; 10) увеличить полосу следящей системы и получить зависимость динамической ошибки от полосы.
- 3. 4 Ввести следящую систему в устойчивое состояние, отключить сигнал «Ramp» и подать на ее вход сигнал белого шума. Также путем изменения полосы следящей системы за счет К1 (К1=0, 1; 0, 5; 1, 0; 10) получить зависимость флуктуационной ошибки от полосы (К1).
В. Определение ошибок следящей системы с фильтрами Винера-Кальмана.
- 3. 5 В следящей системе включить только фильтры Винера-Кальмана, подать на вход формирующих фильтров белый шум и подключить их к следящей системе.
- Выбрать одинаковые фильтры Винера-Кальмана в формирующих фильтрах и следящей системы (для начала взять желтые блоки) и включить модель. Получить энергетические спектры на выходах этих схем (Фиг. 2) и определить флуктуационную ошибку следящей системы.
|
|
|

Фиг. 2
- Выбрать разные фильтры Винера-Кальмана (для примера в формирующем фильтре взять апериодическое звено, а в следящей системе – интегратор) и включить модель. Получить энергетические спектры на выходах этих схем (Фиг. 3) и определить флуктуационную ошибку следящей системы.
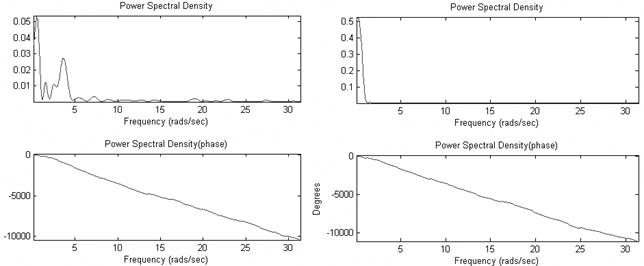
Фиг. 3
- По указанию преподавателя выбрать любую комбинацию этих фильтров и провести соответствующее исследование.
Содержание отчета
1. Структурная схема лабораторной работы.
2. Графики измерений.
3. Выводы
Контрольные вопросы
1. Объясните зависимости динамических и флуктуационных ошибок от полосы пропускания замкнутого следящего измерителя.
2. Влияние полосы и параметров фильтра следящего измерителя на его запас устойчивости по амплитуде и фазе.
3. Основное условие применения фильтров Винера-Кальмана в радиолокационных следящих измерителях.
4. Зависимость ошибок следящего измерителя от системы.
Литература
1. Охрименко А. Е. Основы радиолокации и радиоэлектронная борьба. Ч. I. – М.: Воениздат, 1983
2. Радиолокационные системы воздушных судов. Под редакцией Давыдова П. С. – М.: Транспорт, 1988 (стр. 38 - 49)
3. Кузнецов А. А. и др. Радиолокационное оборудование автоматизированных систем УВД. – М.: Транспорт, 1985.
|
|
|
