 |


Определение вида синхронизации, используемой в разрабатываемой СПДИ
|
|
|
|
Для цифровых систем передачи информации, к которым относится разрабатываемая СПДИ, обязательным процессом при передаче сигналов является наличие синхронизации. В нашем случае для организации когерентного приема фазоманипулированных сигналов, а также временного уплотнения/разуплотнения сигналов, поступающих от источников информации, необходимо наличие четырех составляющих процесса синхронизации цифровых сигналов, а именно:
1. тактовой (или фазовой)– для синхронизации фазы поступающей в приемник несущей и ее копии. Этот процесс называется фазовой автоподстройкой частоты (ФАПЧ), и характерен для когерентных СПДИ с бинарной фазовой манипуляцией. В результате ФАПЧ демодулятор приемника синхронизируется по частоте и фазе с несущей принятого сигнала.
2. канальной (или символьной) – для синхронизации моментов работы демодулятора приемника в соответствии с временными характеристиками несущей принятого сигнала, дискретно излучаемой передатчиком (т.е. синхронизация по битам (символам)).
3. кадровой – для синхронизации значимых моментов времени при временном способе уплотнения/ разделения каналов. Причем, на передаче - для уплотнения сигналов источников информации (канальных интервалов) в групповой цифровой сигнал (кадр), а на приеме – для разделения группового сигнала (кадра) на сигналы источников информации (временные канальные интервалы).
4. цикловой – для синхронизации значимых моментов времени при временном способе уплотнения/разделения кадров СПДИ. Причем, на передаче – для уплотнения кадров СПДИ в циклы системы, а на приеме – для разделения циклов СПДИ на кадры системы.
Рассмотрим подробнее эти составляющие процесса синхронизации, используемые в СПДИ. Для приемника когерентной бинарной фазовой манипуляции схема фазовой синхронизации будет иметь следующий вид, представленный на рис. 5.1
|
|
|
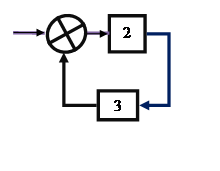
Рис.5.1 Схема фазовой (тактовой) синхронизации.
Контур ФАПЧ состоит из трех основных компонентов: детектора фазы (1), контурного фильтра (2) и генератора, управляемого напряжением (3).
Для любой СПДИ существуют ошибки синхронизации фазы и частоты принимаемого сигнала. Если контур не способен отследить все фазовые ошибки, то битовая вероятность ошибки будет больше теоретически достижимой, в нашем случае: 
 , где β – ошибка рассогласования принятого несущей и опорного сигнала по фазе. В большинстве случаев, принимают β=0.5, тогда
, где β – ошибка рассогласования принятого несущей и опорного сигнала по фазе. В большинстве случаев, принимают β=0.5, тогда
 , при
, при  (5.1)
(5.1)
Для оптимальной демодуляции приемник системы должен синхронизироваться со значащими моментами поступающих цифровых символов. В случае если, исходные данные группового информационного радиосигнала приемнику не известны (как в нашем случае), то в качестве системы канальной (символьной) синхронизации используются синхронизаторы без использования данных. Характерно, что, как и в случае фазовой синхронизации, появляется дополнительная ошибка приема значащих моментов сигнала. [3]
Выражение для битовой вероятности ошибки в этом случае будет иметь следующий вид:
 при
при  (5.2)
(5.2)
Чтобы входной цифровой сигнал имел смысл для приемника, приемник должен синхронизироваться с кадровой структурой принимаемого сигнала. Самым простым методом, используемым для обеспечения кадровой синхронизации в системах непрерывного трафика данных (к которым относится разрабатываемая СПДИ), является введение маркера кадровой синхронизации. В нашем случае, в качестве маркера кадра будем использовать отдельный бит, периодически вводимый передатчиком в групповой поток данных (а именно в начало каждого кодового слова). Приемник должен знать период введения бита кадровой синхронизации Тбк, потому как именно в этот промежуток времени система кадровой синхронизации будет сопоставлять (коррелировать) приемный сигнал с эталонной последовательностью.
|
|
|
Для разрабатываемой системы период повторения маркера кадра Тбк будет равен длительности кодового слова Тсл (или временного интервала Тви)

Для различения кадров (временных интервалов) СПДИ принимаемых в групповом сигнале приемником, передатчик излучает с периодичностью Тбц в канал связи маркер цикловой синхронизации (как простейший из вариантов реализации системы цикловой синхронизации). В нашем случае будем использовать отдельный бит, периодически вводимый передатчиком в групповой сигнал (в конце цикла, состоящего из 80 кадров).
Для разрабатываемой системы период повторения маркера цикла Тбц будет равен длительности цикла Тц, а именно: 
Рассчитаем битовую вероятность ошибки для сигналов кадровой и цикловой синхронизации. Аналитические соотношения будут иметь вид:
для кадровой синхронизации:
 (5.3)
(5.3)
 (5.4)
(5.4)
где  ;
;  - рассчитаны ранее;
- рассчитаны ранее;  - энергия одного бита сигнала кадровой синхронизации,
- энергия одного бита сигнала кадровой синхронизации,  - энергия одного бита сигнала цикловой синхронизации:
- энергия одного бита сигнала цикловой синхронизации:
 (5.5)
(5.5)
 (5.6)
(5.6)
I кКС - скорость передачи маркеров кадровой синхронизации,  - скорость передачи маркеров цикловой синхронизации.
- скорость передачи маркеров цикловой синхронизации.
 (5.7)
(5.7)
Подставим в (5.3) значение, полученное в (5.7), получим:

Тогда

Для сигналов цикловой синхронизации  , тогда в выражение (5.6) подставим значение
, тогда в выражение (5.6) подставим значение  . Получим:
. Получим:
 .
.
Тогда

Нарушение кадровой и цикловой синхронизации неминуемо приведет к срыву процесса передачи данных: приемник будет анализировать входящий сигнал до тех пор (при установленной тактовой и канальной синхронизации), пока не распознает маркерные биты кадровой и цикловой синхронизации.
|
|
|
