 |


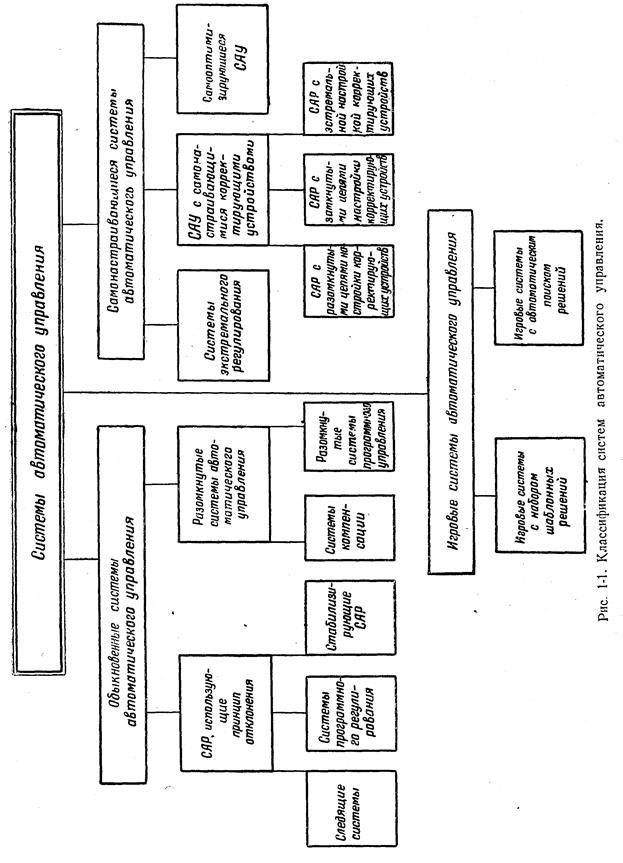
Классификация систем автоматического управления.
|
|
|
|
Классификация систем по виду начальной и рабочей информации.
Дать подробную законченную классификацию систем автоматического управления практически невозможно.
С точки зрения общности классификации систем автоматического управления наиболее удобным классификационным признаком является используемая информация об управляемом процессе или системе.
Информация – любая совокупность сведений, первичным источником которых является опыт.
При классификации систем автоматического управления следует различать два вида информации: начальную или априорную информацию и рабочую информацию.
Необходимой начальной или априорной информацией назовём совокупность сведений об управляемом процессе или системе, необходимых для построения и функционирования данной системы автоматического управления рассматриваемым процессом и имеющихся в нашем распоряжении до начала функционирования системы.
Рабочей информацией называется совокупность сведений о состоянии процесса, используемых в самом процессе.
Рабочая информация передаётся в виде сигналов – физических процессов, несущих информацию.
Обыкновенные (несамонастраивающиеся) системы автоматического управления – системы, требующие для построения и функционирования наибольшей (полной) начальной информации.
Самонастраивающиеся системы автоматического управления – системы, не требующие для своего построения и функционирования полной начальной информации об управляемом процессе.
Перед самонастраивающимися (адаптивными) системами ставятся следующие задачи:
1. Поддержание режима, близкого к оптимальному (наилучшему) – автоматические оптимизаторы или экстремальные регуляторы.
|
|
|
2. Поддержание оптимальной работы системы по условию максимального быстродействия.
При этом различают:
1. Системы с самонастройкой программы (экстремальные системы).
2. Системы с самонастройкой параметров (собственно самонастраивающиеся системы).
3. Системы с самонастройкой структуры (самоорганизующиеся системы).
Сложные задачи управления операциями над многими объектами можно трактовать как задачи автоматического проведения некоторой игры. Действия сторон могут быть частично случайными, частично подчинёнными некоторым правилам – алгоритмам.
Игра состоит из ряда последовательных этапов- шагов.
Основной особенностью принципа действия игровых систем является формирование команд управления на основе сопоставления множества возможных решений – выборов на каждом этапе управляемой операции. Критерием сопоставления различных возможных решений-выборов служит некоторый показатель, именуемый функцией выгоды.
Классификация систем автоматического регулирования по виду оператора
Системы.
Математическая модель системы управления — это пара "оператор системы и модель внешних воздействий". Оператором системы называется закон, в соответствии с которым система преобразует внешнее (входное) воздействие g в выходной сигнал х (рис. В.4).
Оператор системы. Функция, которая любому значению аргумента x ставит в соответствие некоторый элемент y множества Y, не являющегося множеством чисел, называется оператором. Под понятием оператора объединяются любые математические действия: все алгебраические действия, дифференцирование, интегрирование, сдвиг во времени, решение дифференциальных, интегральных, алгебраических и любых других функциональных уравнений, а также любые логические действия. Задать оператор системы – это значит задать совокупность (программу) действий, которые надо осуществить над входной функцией, чтобы получить выходную функцию.
|
|
|

Рис. В.4
По виду оператора системы управления делятся на:
а) линейные и нелинейные;
б) непрерывные, дискретные, непрерывно-дискретные;
в) нестационарные и стационарные;
г) детерминированные и стохастические;
д) одномерные и многомерные;
е) с сосредоточенными и с распределенными параметрами.
Внешние воздействия делятся на:
а) непрерывные (функции непрерывного аргумента) и дискретные (функции дискретного аргумента);
б) детерминированные и случайные;
в) одномерные и многомерные.
Чтобы классифицировать конкретную систему, нужно указать на шесть классов, к которым принадлежит оператор системы, и на три класса, к которым принадлежат внешние воздействия. Например, она может оказаться линейной непрерывно-дискретной нестационарной детерминированной одномерной с сосредоточенными параметрами при непрерывных случайных одномерных внешних воздействиях.
Поясним названия классов операторов на примере описания систем дифференциальными или разностными уравнениями. Линейные системы описываются линейными дифференциальными уравнениями, нелинейные — нелинейными дифференциальными уравнениями. Непрерывные системы описываются дифференциальными уравнениями; дискретные — разностными; непрерывно-дискретные — дифференциально-разностными уравнениями. Нестационарные системы описываются уравнениями с переменными коэффициентами, стационарные — уравнениями с постоянными коэффициентами. Детерминированные системы описываются уравнениями, коэффициенты которых являются детерминированными величинами или функциями времени, стохастические — стохастическими уравнениями. Одномерные системы имеют один вход и один выход, многомерные системы имеют суммарное число входов и выходов, большее двух. Наконец, системы с сосредоточенными параметрами описываются обыкновенными дифференциальными уравнениями, с распределенными параметрами — уравнениями в частных производных.
|
|
|
