 |


Частота вращения ротора асинхронного двигателя
|
|
|
|
n2 =n1(1 - s) = (f160/ p)(l -s).
Регулирование частоты вращения изменением подводимого напряжения. Возможность этого способа регулирования подтверждается графиками М = f (s), построенными для разных значений U1.

При неизменной нагрузке на валу двигателя увеличение подводимого к двигателю напряжения вызывает рост частоты вращения. Однако диапазон регулирования частоты вращения получается небольшим, что объясняется узкой зоной устойчивой работы двигателя, ограниченным значением критического скольжения и недопустимостью значительного превышения номинального значения напряжения.
Подводимое к двигателю напряжение изменяют либо регулировочным автотрансформатором, либо реакторами, включаемыми в разрыв линейных проводов.
Узкий диапазон регулирования и неэкономичность (необходимость в дополнительных устройствах) ограничивают область применения этого способа регулирования частоты вращения.
Регулирование частоты вращения изменением частоты тока в статоре.
Для осуществления этого способа регулирования необходим источник питания двигателя переменным током с регулируемой частотой (преобразователи частоты). Чтобы регулировать частоту вращения, достаточно изменить частоту тока f 1. Но с изменением частоты f 1 = ω1p/ (2π) будет изменяться и максимальный момент. Поэтому для сохранения неизменными перегрузочной способности, коэффициента мощности и КПД двигателя на требуемом уровне необходимо одновременно с изменением частоты f 1 изменять и напряжение питания U1.
Частотное регулирование двигателей позволяет плавно изменять частоту вращения в широком диапазоне (до 12:1). Однако источники питания с регулируемой частотой тока удорожают установку.
|
|
|
Регулирование частоты вращения изменением числа полюсов обмотки статора.
Этот способ регулирования частоты вращения дает ступенчатую регулировку (см. формулу).
Изменять число полюсов в обмотке статора можно либо укладкойна статоре двух обмоток с разным числом полюсов, либо укладкой на статоре одной обмотки, конструкция которой позволяет путем переключения катушечных групп получать различное число полюсов. Последний способ получил наибольшее применение.
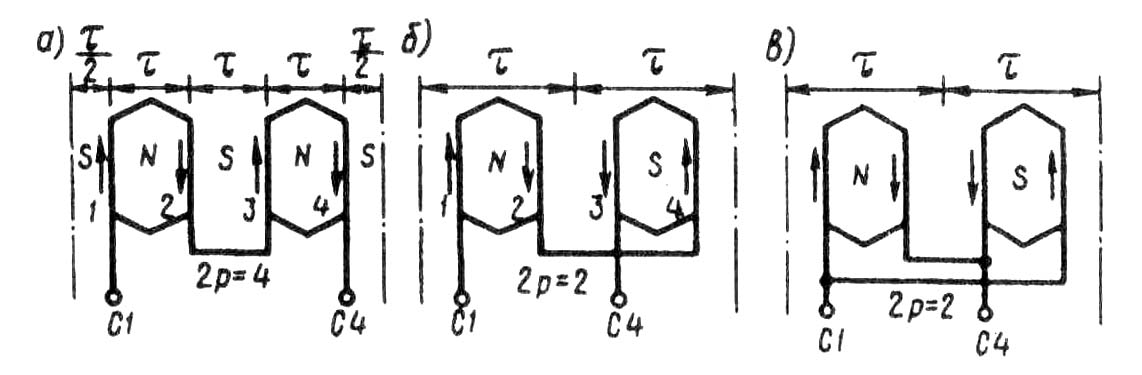
Принцип преобразования четырехполюсной обмотки в двухполюсную (для одной фазы) показан на рис. 15.12: при последовательном согласном соединении двух катушек возбуждаемое ими магнитное поле образует четыре полюса (рис. 15.12, а); при последовательном встречном (рис. 15.12, б) или параллельном соединениях (рис. 15.12, в) — два полюса. Таким образом, принцип образования полюсно переключаемой обмотки основан на том, что каждая фаза обмотки делится на части (катушечные группы), изменяя схему соединения которых получают разное число полюсов.
Если на статоре расположить две полюсно переключаемые обмотки, то получим четырехскоростной двигатель. Однако возможно применение и одной обмотки, допускающей путем переключения катушечных групп получение до четырех вариантов различных чисел полюсов.
Регулирование частоты вращения изменением числа полюсов на статоре применяют исключительно в асинхронных двигателях с короткозамкнутым ротором, так как число полюсов в обмотке этого ротора всегда равно числу полюсов статора и для изменения частоты вращения достаточно изменить число полюсов в обмотке ротора. В случае же фазного ротора пришлось бы и на роторе применить полюсно переключаемую обмотку, что привело бы к недопустимому усложнению двигателя.
Регулирование частоты вращения изменением активного сопротивления в цепи ротора.
|
|
|
Этот способ регулирования частоты вращения возможен лишь в двигателях с фазным ротором. С увеличением активного сопротивления ротора возрастает скольжение, соответствующее заданному нагрузочному моменту.

Частота вращения двигателя при этом уменьшается.
Практически изменение активного сопротивления цепи ротора достигается включением в цепь ротора регулировочного реостата (РР), подобного пусковому реостату (ПР) (см. рис. 15.2), но рассчитанного на длительный режим работы. Уменьшение частоты вращения (увеличение скольжения) сопровождается ростом электрических потерь в цепи ротора и снижением КПД двигателя. Так, если при неизменном нагрузочном моменте на валу двигателя увеличить скольжение от 0,02 до 0,5, что соответствует уменьшению частоты вращения примерно вдвое, то потери в цепи ротора составят почти половину электромагнитной мощности двигателя. Это свидетельствует о неэкономичности рассматриваемого способа регулирования. К тому же необходимо иметь в виду, что рост потерь в роторе сопровождается ухудшением условий вентиляции из-за снижения частоты вращения, что приводит к перегреву двигателя.
Рассматриваемый способ регулирования имеет еще и тот недостаток, что участок механической характеристики, соответствующий устойчивой работе двигателя, при введении в цепь ротора добавочного сопротивления становится более пологим и колебания нагрузочного момента на валу двигателя сопровождаются значительными изменениями частоты вращения ротора.
Но несмотря на указанные недостатки, рассмотренный способ регулирования частоты вращения широко применяется в асинхронных двигателях с фазным ротором. Способ обеспечивает регулирование частоты вращения в широком диапазоне, но только вниз от синхронной частоты вращения. Вместе с тем он обеспечивает двигателю улучшенные пусковые свойства.
|
|
|
