 |


Виды микроэвм и микроконтроллеров
|
|
|
|
Микроконтроллеры – управляющие устройства в микроисполнении – широко применяются в различных областях технической деятельности человека: в ПЭВМ, стиральных машинах, музыкальных центрах, автомобилях, средствах измерений, и т.д. Микроконтроллер является управляющим ядром аппаратных комплексов различного назначения. С его помощью гораздо легче, в отличие от традиционных решений, реализуются различные схемы. Опираясь на [4], можно представить внутреннее содержание микроконтроллера и его направленность на некоторые возможные объекты управления так, как это сделано на рисунке 7.
|
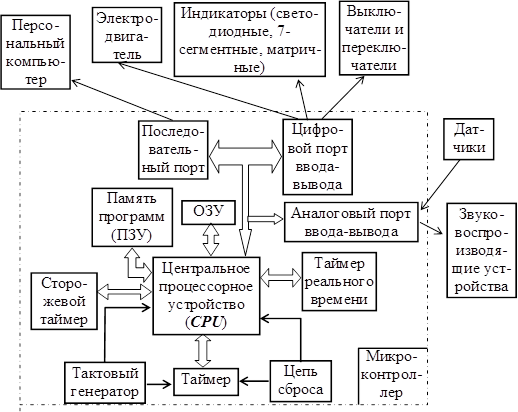
Рис. 7 - Содержание и возможная направленность микроконтроллера
Достоинство микроконтроллера (МК) – это наличие на кристалле большого числа периферийных схем, что позволяет ему общаться с разнообразными внешними устройствам при минимуме дополнительных узлов. Это также уменьшает размеры конструкции и позволяет снизить потребление энергии от источника питания.
Из рисунка 7 видно, что МК содержит типовые функциональные узлы. К ним относятся следующие.
1. Центральное процессорное устройство – оно принимает из памяти программ коды команд, декодирует их и исполняет. В него входят арифметико-логическое устройство (АЛУ), регистры и цепи управления.
2. Память программ – она хранит коды команд, последовательность которых формирует программу микроконтроллера.
3. Оперативная память данных (ОЗУ) – здесь хранятся переменные программ. У многих МК здесь также расположен стек.
4. Тактовый генератор – инициирует работу контроллера, и от него зависит скорость работы МК.
5. Цепь сброса – приводит МК в исходное состояние, чем определяет правильный запуск его работы.
|
|
|
6. Последовательный порт – позволяет обмениваться данными с внешними устройствами при малом числе проводов.
7. Цифровой порт ввода-вывода – с помощью его линий можно управлять одновременно несколькими внешними устройствами, адресуя их.
8. Таймер – задаёт временные интервалы.
9. Сторожевой таймер – специальный таймер, предназначенный для предотвращения системных сбоев программы: после запуска он начинает отсчёт заданного временного интервала. Если программа не перезапустит его до истечения этого интервала времени, сторожевой таймер перезапустит МК. То есть программа должна сигнализировать таймеру, что с ней всё в порядке. Если такого сигнала нет, то в работе программы по какой-то причине произошёл сбой.
Наиболее распространён ОмК ф. Intel 51-й серии и его клоны от разных производителей. Кроме этого, появились интегральные схемы, использующие сокращённый набор команд процессора (RISK – Reduced Instruction Set Computers). Среди них популярны контроллеры ф. Microchip семейства PIC (Peripheral Interface Controller). Также лидирующее место занимают RISK ОмК из серии AVR (например, ф. Аtmel). PIC-контроллеры выпускают многие фирмы, кому не лень их делать.
PIC-контроллер имеет также RISK-процессор, только архитектура процессора другая и кодовое слово не 8 бит, а 11–15 бит.
Основное отличие RISK-процессора от 51-й серии ф. Intel, например, то, что команда в нём исполняется за один такт, и число команд ограничено – обычно около 60–70 штук. Поэтому в ходе изучения нужно рассматривать оба типа микроконтроллеров. Как обычный ОмК нужно рассмотреть контроллер 51-й серии (и как самый используемый тип контроллеров). А в качестве RISK-контроллера необходимо рассмотреть PIC-контроллеры и контроллер AVR ф. Аtmel, так как для него много всевозможного бесплатного обеспечения, используемого для программирования и демонстрации.
|
|
|
Впрочем, нет принципиальной разницы, на каком оборудовании изучаются ОмК, так как сейчас все они часто программируется на языке С. Но ресурсы в разных процессорах разные и, в зависимости от модели, что-то может присутствовать, а что-то может быть упущено. После контроллера 51-й серии целесообразно рассматривать AVR-контроллеры, а затем идут atmega и arm как дальнейшее развитие. Достаточно рассмотреть и изучить один процессор – и полученные знания легко распространяются на все остальное. Новые ресурсы и возможности появляются, а принципы остаются всё те же (кроме PIC-контроллеров).
Семейство MCS-51, по сути дела, стало прародителем семейств так называемых PIC и AVR микроконтроллеров, выполненных по Гарвардской архитектуре процессора.
В случае высоких требований к быстродействию МК, при условии их низкой стоимости и энергопотребления, разработки на основе МК MCS-51 применяются реже, уступая место разработкам на PIC и AVR микроконтроллерах.
В целом, многообразие современных ОмК чрезвычайно велико. Зачастую их делят на виды [5]:
– встраиваемые 8-разрядные;
– 16- и 32-разрядные МК;
– цифровые сигнальные процессоры (DSP).
Встраиваемые (embedded) микроконтроллеры имеют все ресурсы (память, устройства ввода-вывода, и т. д.) на одном кристалле с процессорным ядром. На такой контроллер подаются питание и тактовые сигналы. В них процессорное ядро может быть общего плана или разработано специально для данного МК. Основное назначение встраиваемых МК – обеспечить гибкое программируемое управление объектами и связь с внешними устройствами. Они не приспособлены для выполнения комплекса сложных функций.
Такие МК содержат большое число вспомогательных устройств, за счёт чего реализуется их включение в конкретную систему с использованием минимального числа дополнительных компонентов. Обобщённая структура такого контроллера приведена на рисунке 8.

Рис. 8 - Обобщённая структура простого встраиваемого микроконтроллера
микропроцессор микроконтроллер шина
В состав таких МК обычно входят схема начального запуска (Reset); генератор тактовых импульсов; центральный процессор; память программ (ПЗУ или ППЗУ, ЭППЗУ); память данных (ОЗУ); средства ввода-вывода данных; таймеры, фиксирующие число командных циклов.
|
|
|
Сложные встраиваемые МК реализуют дополнительные возможности: встроенный монитор-отладчик программ; внутренние средства программирования памяти программ; обработка прерываний от различных источников; аналоговый ввод-вывод; последовательный ввод-вывод (синхронный и асинхронный); параллельный ввод-вывод (включая интерфейс с компьютером); подключение внешней памяти (микропроцессорный режим).
Типичные значения частоты тактовых сигналов различных МК составляют 10–20 МГц. Главным фактором, ограничивающим их скорость, является время доступа к памяти.
Микроконтроллеры с внешней памятью (особенно 16- и 32-разрядные) используют только внешнюю память, которая включает в себя как память программ ПЗУ (ROM), так и некоторый объём памяти данных ОЗУ (RAM), требуемый для конкретного применения. Структура МК с внешней памятью приведена на рисунке 9.
Примером такого МК служит БИС ф. Intel 80188. Это микропроцессор 8088 (используемый в компьютерах IBM PC), интегрированный на общем кристалле с дополнительными схемами, реализующими ряд стандартных функций (прерывания и прямой доступ к памяти DMA). Здесь в одном корпусе объединены устройства, необходимые для реализации систем, в которых могут использоваться функциональные возможности и ПО микропроцессора 8088.

Рис. 9 - Обобщённая структура микроконтроллера с внешней памятью
Микроконтроллеры с внешней памятью предназначены для применений, требующих большого объёма памяти данных ОЗУ и небольшого количества устройств (портов) ввода-вывода. Для них наиболее подходят приложения, в которых критическим ресурсом является память, а не число логических входов–выходов общего назначения, тогда как для встраиваемых МК характерна обратная ситуация.
Типичный пример МК с внешней памятью – контроллер жёсткого диска (HDD) с буферной кэш-памятью, который обеспечивает промежуточное хранение и распределение больших объёмов данных (обычно, мегабайты). Внешняя память даёт возможность такому МК работать с более высокой скоростью, чем встраиваемый МК.
|
|
|
Цифровые сигнальные процессоры (DSP) предназначены для получения текущих данных от аналоговой системы и формирования соответствующего отклика. В них АЛУ работает с очень высокой скоростью, что позволяет осуществлять обработку данных в реальном масштабе времени (в темпе поступления входных данных). Пример – активный шумоподавляющий микрофон, когда второй микрофон обеспечивает сигнал окружающего шума, который вычитается из сигнала первого микрофона. Так подавляется шум и остаётся только голос.
Цифровым сигнальным процессорам присущи особенности встраиваемых МК и контроллеров с внешней памятью. Они не предназначены для автономного применения, а входят в состав систем и предназначены для управления внешним оборудованием. Например, наличие аналогового ввода–вывода и встроенного устройства цифровой обработки в БИС КМ1813ВЕ1 позволяет использовать её для построения фильтров (в том числе перестраиваемых), в синтезаторах и анализаторах речи, в анализаторах спектра, для генераторов сигналов различной формы и т. п.
Примером отечественных ОмЭВМ может служить таблица А.1 [6, 7] приложения А. Наиболее доведённой до практического применения являлась серия 1850. Ряд серий ОмЭВМ имеют БИС отладочного кристалла без встроенного ПЗУ и позволяют отрабатывать различные применения БИС данных серий за счёт замены или перепрограммирования внешнего ПЗУ (например, КМ1814ВЕ3, КР1816ВЕ35, КР1816ВЕ39 или КР1820ВЕ1). Наличие аналогового ввода-вывода и встроенного устройства цифровой обработки в БИС КМ1813ВЕ1 позволяет использовать её для построения фильтров (в том числе перестраиваемых), в синтезаторах и анализаторах речи, в анализаторах спектра, для генераторов сигналов различной формы и т. п.
Характеристики отечественных микроконтроллеров приведены в таблице Б.1 приложения Б, а характеристики зарубежных ОмК приведены в таблице Б.2. Описание контроллера серии AVR (микроконтроллер AT90S2313) приведено в [8].
ВЫВОДЫ
Основной причиной качественно нового этапа в развитии автономных средств вычислительной техники послужили успехи электронной промышленности в увеличении разрешающей способности формирования элементов на полупроводниковом кристалле. Целесообразность применения однокристальных МП-устройств определяется эффективностью при их включении в проект. Преимущество RISC-процессоров проявляется в том, что их более простые команды требуют для выполнения значительно меньшее число машинных циклов. За счёт этого достигается существенное увеличение производительности.
ОмЭВМ объединяет на одном полупроводниковом кристалле как сам МП, так и ряд дополнительных устройств, обеспечивающих его функционирование в системе управления: оперативную и программную память, генератор синхроимпульсов, разнообразные устройства ввода и вывода информации и др. ОмК– это устройства переработки информации, ориентированные на работу с некоторой искусственной системой. Большое число портов – их особенность. Микроконтроллер является управляющим ядром аппаратных комплексов различного назначения. С его помощью гораздо легче, в отличие от традиционных решений, реализуются различные схемы.
|
|
|
Основное преимущество Принстонской архитектуры в том, что она упрощает устройство микропроцессора, так как реализует обращение только к одной общей памяти при необходимости воспользоваться ЗУ данных, программ или стеком. Это представляет большую гибкость для разработчика ПО прежде всего в области операционных систем реального времени. Гарвардская архитектура выполняет команды за меньшее число тактов, чем предыдущая – здесь больше возможностей для реализации параллельных операций.
С целью уменьшения выводов БИС ОмЭВМ и ОмК при их построении применяют различные структурные организации. Многообразие современных ОмК чрезвычайно велико, и часто их делят на виды: встраиваемые 8-разрядные; 16- и 32-разрядные; цифровые сигнальные процессоры.
ЛИТЕРАТУРА
1. Мирский Г.Я. Микропроцессоры в измерительных приборах / Г.Я. Мирский. – М.: Радио и связь, 1984. – 160 с.
2. Шилейко А.В. Микропроцессоры / А.В. Шилейко, Т.И. Шилейко. – М.: Радио и связь, 1986. – 112 с.
3. Сташин В.В. Проектирование цифровых устройств на однокристальных микроконтроллерах / В.В. Сташин, А.В. Урусов, О.Ф. Мологонцева. – М.: Энергоатомиздат, 1990. – 224 с.
4. Голубцов М.С. Микроконтроллеры AVR: от простого к сложному / М.С. Голубцов, А.В. Кириченкова. – М.: СОЛОН–Пресс, 2006. – 304 с.
5. Предко М. Руководство по микроконтроллерам. Т. 1 / М. Предко. – М.: Постмаркет, 2001. – 416 с.
6. Басманов А.С. Микропроцессоры и однокристалные микроЭВМ: Номенклатура и функциональные возможности / А.С. Басманов, Ю.Ф. Широков под ред. В.Г. Домрачёва. – М.: Энергоатомиздат, 1988. – 128 с.
7. Варламов И.В. Микропроцессоры в бытовой технике / И.В. Варламов, И.Л. Касаткин. – М.: Радио и связь, 1990. – 104 с.
8. Никонов А.В. Однокристальные микроЭВМ и микроконтроллеры: учеб. пособие / А.В. Никонов. – Омск: Изд-во ОмГТУ, 2009. – 56 с.
9. Токхейм Р. Основы цифровой электроники. – М.: Мир, 1998. – 392 с.
10. Денисов К.М. Микропроцессорная техника. Конспект лекций [Электронный ресурс]. – URL: http://ets.ifmo.ru/denisov/lec/oglavlen.htm.
11. Евстифеев А.В.Микроконтроллеры AVR семейств Tiny и Mega фирмы ATMEL / А.В. Евстифеев. – М.: Издательский дом «Додэка–XXI», 2004. – 560 с.
12. Электроника НТБ // Для специалистов, занятых разработкой, производством и применением изделий электронной техники, а также ученым, преподавателям и студентам технических вузов.
13. Computer // IEEE Computer Society.
14. Бродин В.Б. Системы на микроконтроллерах и БИС программируемой логики / В.Б. Бродин, А.В. Калинин. – М.: ЭКОМ, 2002. – 400 c.
15. Цифровая обработка информации на основе быстродействующих БИС / С.А. Гамкрелидзе [и др.]; под ред. В.Г. Домрачева. – М.: Энергоатомиздат, 1988. – 136 с.
16. Однокристальные микроЭВМ / А.В. Боборыкин [и др.]. – М.: Бином, МИКАП, 1994. – 398 с.
Приложение А
|
|
|
