 |


Акустическое поле преобразователя
|
|
|
|
Акустическое поле излучения преобразователя определяется давлением (или действующей компонентой тензора напряжения), которое действует на элементарный приемник, расположенный в произвольной точке пространства.
Акустическое поле приема определяется сигналом приемного преобразователя при действии элементарного излучателя, расположенного в произвольной точке пространства.
Акустическое поле излучения - приема определяется сигналом приемного преобразователя, возникающим при отражении сигнала возбуждающего преобразователя от элементарного рассеивателя, расположенного произвольной точке пространства.
Обычно поле приема преобразователя повторяет его же поле излучения.
Для наглядности мы рассмотрим формирование полей излучения с точки зрения геометрической акустики, путем построения моделей прохождения лучей продольных, сдвиговых и поверхностных волн в некоторых телах, ограниченных плоскими и кривыми поверхностями.
Будем считать твердые тела однородными, изотропными, а ограничивающие их поверхности - гладкими.
Рассмотрим геометрию волнового поля дискового излучателя, расположенного на плоской поверхности твердого упругого полупространства с неограниченными размерами по осям X, У, Z. Считаем, что излучатель создает напряжение, нормальное к поверхности. Если пренебречь влиянием промежуточных слоев между излучателем и средой, то волновое поле будет иметь вид, представленный на рисунок 6.

Рисунок - 6. Акустическое поле.
Такое поле имеет две зоны:
1. ближняя зона (зона Френеля) толщиной  :
:
 ,
,
в пределах которой отсутствует расхождение лучей и пучок лучей в сечении повторяет сечение пластины. При этом:
|
|
|

Для ближней зоны максимум наблюдается при:

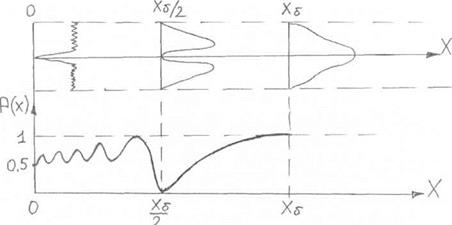

Рисунок 7.
2. Дальняя зона (зона Фраунгофера)- это зона при  , в пределах которой наблюдается расхождение лучей. Она характеризуется тем, что интенсивность акустической волны при удалении от преобразователя уменьшается обратно пропорционально расстоянию r. Угол расхождения
, в пределах которой наблюдается расхождение лучей. Она характеризуется тем, что интенсивность акустической волны при удалении от преобразователя уменьшается обратно пропорционально расстоянию r. Угол расхождения  , за пределами которого интенсивность волны меньше 0,1 равен
, за пределами которого интенсивность волны меньше 0,1 равен
 ,
,
| где: | 
| - | длина волны. |
Для дальней зоны диаграмма направленности имеет вид, показанный на рисунок 8.
 ,
,
 ,
,
 ,
,
| где: | 
| - | функция Бесселя первого рода. |

Рисунок 8.
На рисунке 9 показано изменение формы пучка при увеличении диаметра преобразователя.
Такая картина является идеальной. Практически мы всегда имеем дело с ограниченными телами. Кроме того, нормально приложенная к поверхности среды сила, вызовет в ней не только нормальную компоненту напряжения. На границах преобразователя возникнут напряжения, перпендикулярные направлению действующей силы, т.е. параллельно поверхности. В результате на границе излучателя возникнут сдвиговые и поверхностные волны, затухающие с глубиной. Взаимодействие всех этих волн приводит к искажению идеальной картины.
Кроме того, реальные тела имеют ограниченные размеры, т.е. существуют границы. Отраженные от границ волны взаимодействуют с первичными, создавая сложные акустические поля.
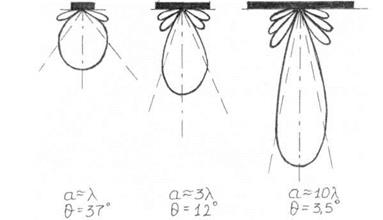
Рисунок - 9.
ОСНОВНЫЕ МЕТОДЫ АКУСТИЧЕСКОГО КОНТРОЛЯ
ОБЩИЕ СВЕДЕНИЯ
Акустическими методами называют методы контроля, основанные на изменении упругих колебаний и волн в контролируемом объекте.
Согласно ГОСТ 23829-79 акустические методы делят на две большие группы: Активные - использующие излучение и прием акустических колебаний Пассивные - основанные только на приеме колебаний. К активным методам относят методы, основанные на прохождении и отражении УЗК.
|
|
|
Известно много акустических методов неразрушающего контроля, некоторые из которых применяются в нескольких вариантах. Классификация акустических методов показана на рисунок20. Их делят на две большие группы - активные и пассивные методы.

Рисунок 20 – Классификация акустических методов контроля
Активные методы основаны на излучении и приеме упругих волн, пассивные - только на приеме волн, источником которых служит сам контролируемый объект.
Активные методы делят на методы прохождения, отражения, комбинированные (использующие как прохождение, так и отражение), импедансные и методы собственных частот.
Методы прохождения используют излучающие и приемные преобразователи, расположенные по разные или по одну сторону контролируемого изделия. Применяют импульсное или (реже) непрерывное излучение и анализируют сигнал, прошедший через контролируемый объект.
К методам прохождения относят:
· амплитудный теневой метод, основанный на регистрации уменьшения амплитуды волны, прошедшей через контролируемый объект, вследствие наличия в нем дефекта (рисунок21, а);
· временной теневой метод, базирующийся на регистрации запаздывания импульса, вызванного увеличением его пути в изделии при огибании дефекта (рисунок21, б); тип волны при этом не меняется;
· велосиметрический метод, основанный на регистрации изменения скорости распространения дисперсионных мод упругих волн в зоне дефекта и применяемый при одностороннем и двустороннем доступе к контролируемому объекту (рисунок21, в). В этом методе обычно используют преобразователи с сухим точечным контактом. В варианте с односторонним доступом (рисунок21, верх) скорость возбуждаемой излучателем антисимметричной волны нулевого порядка (а0) в отделенном дефектом слое меньше, чем в бездефектной зоне. При двустороннем доступе (рисунок21, внизу) в бездефектной зоне энергия передается продольной волной L в зоне дефекта - волнами а0, которые проходят больший путь и распространяются с меньшими скоростями, чем продольная волна. Дефекты отмечаются по изменению фазы или увеличению времени прохождения (только в импульсном варианте) по контролируемому изделию.
|
|
|

Рисунок - 21 – Методы прохождения
а – теневой, б – временной теневой, в – велосимметрический
1- генератор, 2 – излучатель, 3 – объект контроля, 4 – приемник,
5 – усилитель, 6 – измеритель амплитуды,
7 – измеритель времени пробега, 8 – измеритель фазы
В методах отражения используют как один, так и два преобразователя; применяют импульсное излучение. К этой подгруппе относят следующие методы дефектоскопии:
Эхо-метод (рисунок22, а) основан на регистрации эхо-сигналов от дефекта. На экране индикатора обычно наблюдают посланный (зондирующий) импульс I, импульс III, отраженный от противоположной поверхности (дна) изделия (донный сигнал) и эхо-сигнал от дефекта II. Время прихода импульсов II и III пропорционально глубине залегания дефекта и толщине изделия. При совмещенной схеме контроля (рисунок22, а) один и тот же преобразователь выполняет функции излучателя и приемника. Если эти функции выполняют разные преобразователи, то схему называют раздельной.
Эхо-зеркальный метод основан на анализе сигналов, испытавших зеркальное отражение от донной поверхности изделия и дефекта, т.е. прошедших путь АВСД (рисунок22, б). Вариант этого метода, рассчитанный на выявление вертикальных дефектов в плоскости ЕF, называют методом тандем. Для его реализации при перемещении преобразователей А и D поддерживают постоянным значение  ; для получения зеркального отражения от невертикальных дефектов, значение
; для получения зеркального отражения от невертикальных дефектов, значение  варьируют. Один из вариантов метода, называемый "косой тандем", предусматривает расположение излучателя и приемника не в одной плоскости (рисунок22, б, вид в плане внизу), а в разных плоскостях, но таким образом, чтобы принимать зеркальное отражение от дефекта. Еще один вариант, называемый К-метод, предусматривает расположение преобразователей по разные стороны изделия, например, располагают приемник в точке С.
варьируют. Один из вариантов метода, называемый "косой тандем", предусматривает расположение излучателя и приемника не в одной плоскости (рисунок22, б, вид в плане внизу), а в разных плоскостях, но таким образом, чтобы принимать зеркальное отражение от дефекта. Еще один вариант, называемый К-метод, предусматривает расположение преобразователей по разные стороны изделия, например, располагают приемник в точке С.
Дельта-метод (рисунок22, в) основан на приеме преобразователем для продольных волн 4, расположенным над дефектом, рассеянных на дефекте волн, излученных преобразователем для поперечных волн 2.
|
|
|
Дифракционно-временной метод (рисунок22, г), в котором излучатели 2 и 2¢, приемники 4 и 4 ¢ излучают и принимают либо продольные, либо поперечные волны, причем могут излучать и принимать разные типы волн. Преобразователи располагают так, чтобы получать максимумы эхо-сигналов волн, дифрагированных на концах дефекта. Измеряют амплитуды и время прихода сигналов от верхнего и нижнего концов дефекта.
Реверберационный метод (рисунок22, д) использует влияние дефекта на время затухания многократно отраженных ультразвуковых импульсов в контролируемом объекте. Например, при контроле клееной конструкции с наружным металлическим слоем и внутренним полимерным слоем дефект соединения препятствует передаче энергии во внутренний слой, что увеличивает время затухания многократных эхо-сигналов во внешнем слое. Отражения импульсов в полимерном слое обычно отсутствуют вследствие большого затухания ультразвука в полимере.
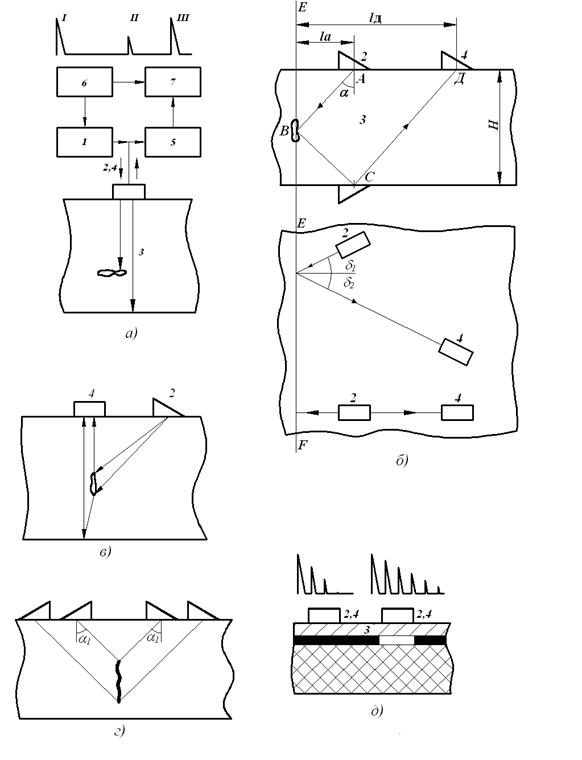
Рисунок 22 - Методы отражения:
а - эхо; б – эхо - зеркальный; в - дельта-метод;
г - дифракционно - временной; д - реверберационный:
1 - генератор; 2 - излучатель; 3 - объект контроля; 4 - приемник;
5 - усилитель; 6 - синхронизатор; 7 - индикатор
В комбинированных методах используют принципы как прохождения, так и отражения акустических волн.
Зеркально-теневой метод основан на измерении амплитуды донного сигнала. На рисунок 23, а отраженный луч условно смещен в сторону. По технике выполнения (фиксирует эхо-сигнал) его относят к методам отражения, а по физической сущности контроля (измеряют ослабление сигнала дважды прошедшего изделие в зоне дефекта) он близок к теневому методу.
Эхо-теневой метод основан на анализе как прошедших, так и отраженных волн (рисунок 23, б).
В эхо-сквозном методе фиксируют сквозной сигнал I, сигнал II, испытавший двукратное отражение в изделии, а в случае появления полупрозрачного дефекта - также сигналы III и IV, соответствующие отражениям волн от дефекта и испытавших также отражение от верхней и нижней поверхностей изделия. Большой непрозрачный дефект обнаруживают по исчезновению или сильному уменьшению сигнала I, т.е. теневым методом, а также сигнала II. Полупрозрачные или небольшие дефекты обнаруживают по появлению сигналов III и IV, которые являются главными информационными сигналами.
Методы собственных частот основаны на измерении этих частот (или спектров) колебаний контролируемых объектов. Собственные частоты измеряют при возбуждении в изделиях как вынужденных, так и свободных колебаний. Свободные колебания обычно возбуждают механическим ударом, вынужденные - воздействием гармонической силы меняющейся частоты.
|
|
|
Различают интегральные и локальные методы. В интегральных методах анализируют собственные частоты изделия, колеблющегося как единое целое, в локальных - колебания отдельных его участков.
Методы собственных частот, использующие вынужденные колебания. В интегральном методе генератор 1 (рисунок 24, в) регулируемой частоты соединен с излучателем 2, возбуждающим упругие колебания (обычно продольные или изгибные) в контролируемом изделии 3. Приемник 4 преобразует принятые колебания в электрический сигнал, который усиливается усилителем 5 и поступает на индикатор резонанса 6. Регулируя частоту генератора 1, измеряют собственные частоты изделия 3. Диапазон применяемых частот до 500 кГц.
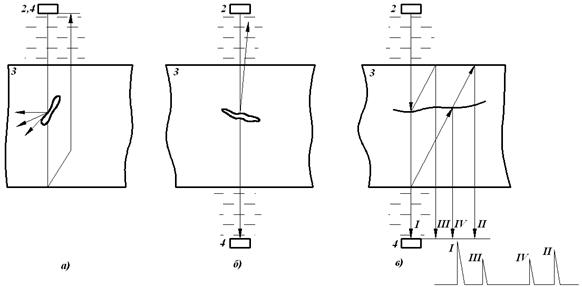
Рисунок - 23 - Комбинированные методы, использующие прохождение и отражение:
а - зеркально-теневой; б – эхо - теневой; в – эхо - сквозной:
2 - излучатель; 4 - приемник;
3 - объект контроля
Локальный методс использованием вынужденных колебаний известен как ультразвуковой резонансный метод. Его применяют в основном для измерения толщин. В стенке изделия 3 (рисунок24, б) с помощью преобразователей 2, 4 возбуждают упругие волны (обычно продольные) непрерывно меняющейся частоты. Фиксируют частоты, на которых отмечаются резонансы системы преобразователь - изделие. По резонансным частотам определяют толщину стенки изделия и наличие в нем дефектов. Дефекты, параллельные поверхности, меняют измеряемую толщину, а расположенные под углом к поверхности - приводят к исчезновению резонансов. Диапазон применяемых частот - до нескольких мегагерц.
Методы собственных частот, использующие свободные колебания,также делят на интегральные и локальные.
В интегральном методе в изделии 3 (рисунок 24, а) ударом молотка 1 возбуждают свободнозатухающие колебания. Эти колебания принимают микрофоном 4,усиливают усилителем 5 и фильтруют полосовым фильтром 6, пропускающим только сигналы с частотами, соответствующими выбранной моде колебаний. Частоту измеряют частотомером 7. Признаком дефекта служит изменение (обычно снижение) частоты. Как правило, используют основные собственные частоты, не превышающие 15 кГц.

Рисунок 24 - Методы собственных частот. Методы колебаний:
- вынужденных: а - интегральный, б - локальный;
- свободных: в - интегральный; г - локальный.
1- генератор непрерывных колебаний меняющейся частоты;
2- излучатель; 3 - объект контроля; 4 - приемник; 5 - усилитель; 6 - индикатор резонанса;
7 - модулятор частоты; 8 - индикатор; 9 - спектроанализатор;
10 - ударный вибратор; 11 - блок обработки информации
В локальном методе (рисунок 24, г) возбуждаемый генератором 1 вибратор 10, создает периодические удары по контролируемому изделию. Электрические сигналы с приемного микрофона 4 через усилитель 5 поступают на спектроанализатор 9. Выделенный последним спектр принятого сигнала обрабатывается решающим устройством 11, результат обработки появляется на индикаторе 12. Кроме микрофонов, применяют пьезоприемники. Дефекты регистрируют по изменению спектра принятого импульсного сигнала. В отличие от интегрального метода контроль выполняется путем сканирования изделий. Обычный диапазон рабочих частот от 0,3 до 20 кГц.
Акустико-топографический метод имеет признаки интегрального и локального методов. Он основан на возбуждении в изделии интенсивных изгибных колебаний непрерывно меняющейся частоты и регистрации распределения амплитуд колебаний с помощью наносимого на поверхность порошка. Упругие колебания возбуждают преобразователем, прижимаемым к сухому изделию. Преобразователь питают от мощного (порядка 0,4 кВт) генератора непрерывно меняющейся частоты. Если собственная частота отделенной дефектом (расслоением, нарушением соединения) зоны попадает в диапазон возбуждаемых частот, колебания этой зоны усиливаются, покрывающий ее порошок смещается и концентрируется по границам дефектов, делая их видимыми. Диапазон используемых частот - от 40 до 150 кГц.
Импедансные методыиспользуют зависимость импедансов изделий при их упругих колебаниях от параметров этих изделий и наличия в них дефектов. Обычно оценивают механический импеданс  , где
, где  и
и  - комплексные амплитуды возмущающей силы и колебательной скорости, соответственно. В отличие от характеристического импеданса
- комплексные амплитуды возмущающей силы и колебательной скорости, соответственно. В отличие от характеристического импеданса  , являющегося параметром среды, механический импеданс характеризует конструкцию. В импедансных методах используют изгибные и продольные волны.
, являющегося параметром среды, механический импеданс характеризует конструкцию. В импедансных методах используют изгибные и продольные волны.
При использовании изгибных волн преобразователь стержневого типа (рисунок25, а) содержит соединенный с генератором 1 излучающий 2 и приемный 4 пьезозлементы. Через сухой точечный контакт преобразователь возбуждает в изделии 3 гармонические изгибные колебания. В зоне дефекта соединения модуль  механического импеданса
механического импеданса  уменьшается и меняется его аргумент j. Эти изменения регистрируются электронной аппаратурой. В импульсном варианте этого метода в системе преобразователь - изделие возбуждают импульсы свободно затухающих колебаний. Признаком дефекта служит уменьшение амплитуды и несущей частоты этих колебаний.
уменьшается и меняется его аргумент j. Эти изменения регистрируются электронной аппаратурой. В импульсном варианте этого метода в системе преобразователь - изделие возбуждают импульсы свободно затухающих колебаний. Признаком дефекта служит уменьшение амплитуды и несущей частоты этих колебаний.
Кроме совмещенного преобразователя применяют раздельно-совмещенные преобразователи, имеющие в общем корпусе раздельные излучающий и приемный вибраторы. Эти преобразователи работают в импульсном режиме. При работе совмещенными преобразователями используют частоты до 8 кГц, раздельно-совмещенными - импульсы с несущими частотами 15-35 кГц.
В другом варианте в контролируемой многослойной конструкции с помощью плоского пьезопреобразователя возбуждают продольные упругие волны фиксированной частоты. Дефекты регистрируют по изменению входного электрического импеданса  пьезопреобразователя. Импеданс определяется входным акустическим импедансом контролируемой конструкции, зависящим от наличия и глубины залегания дефектов соединения между ее элементами. Изменения представляют в виде точки на комплексной плоскости, положение которой зависит от характера дефекта. В отличие от методов, использующих изгибные волны, преобразователь контактирует с изделием через слой контактной смазки.
пьезопреобразователя. Импеданс определяется входным акустическим импедансом контролируемой конструкции, зависящим от наличия и глубины залегания дефектов соединения между ее элементами. Изменения представляют в виде точки на комплексной плоскости, положение которой зависит от характера дефекта. В отличие от методов, использующих изгибные волны, преобразователь контактирует с изделием через слой контактной смазки.
Метод контактного импеданса, применяемый для контроля твердости, основан на оценке механического импеданса зоны контакта алмазного индентора стержневого преобразователя, прижимаемого к контролируемому объекту с постоянной силой. Уменьшение твердости увеличивает площадь контактной зоны, вызывая рост ее упругого механического импеданса, что отмечается по увеличению собственной частоты продольного колеблющегося преобразователя, однозначно связанной с измеряемой твердостью.
Пассивные акустические методыоснованы на анализе упругих колебаний волн, возникающих в самом контролируемом объекте.
Наиболее характерным пассивным методом является акустико-эмиссионный метод (рисунок 25,б). Явление акустической эмиссии состоит в том, что упругие волны излучаются самим материалом в результате внутренней динамической локальной перестройки его структуры. Такие явления, как возникновение и развитие трещин под влиянием внешней нагрузки, аллотропические превращения при нагреве или охлаждении, движение скоплений дислокаций,- наиболее характерные источники акустической эмиссии. Контактирующие с изделием пьезопреобразователи принимают упругие волны и позволяют установить место их источника (дефекта).
Пассивными акустическими методами являются вибрационю-диагностический и шумодиагностический. При первом анализируют параметры вибраций какой-либо отдельной детали или узла (ротора, подшипников, лопатки турбины) с помощью приемников контактного типа, при втором - изучают спектр шумов работающего механизма, обычно с помощью микрофонных приемников.

Рисунок 25 - Методы контроля:
а — импедансный; б - акустико - эмисионный,
1 — генератор; 2 — излучатель; 3 — объект контроля; 4 — приемник;
5 — усилитель; 6 — блок обработки информации с индикатором
По частотному признаку акустические методы делят на низкочастотные и высокочастотные. К первым относят колебания в звуковом и низкочастотном (до нескольких десятков кГц), ультразвуковом диапазонах частот. Ко вторым - колебания в высокочастотном ультразвуковом диапазоне частот: обычно от нескольких сот кГц до 20 МГц. Высокочастотные методы обычно называют ультразвуковыми.
Области применения методов.Из рассмотренных акустических методов контроля наибольшее практическое применение находит эхо-метод. Около 90% объектов, контролируемых акустическими методами, проверяют эхо-методом. Применяя различные типы волн, с его помощью решают задачи дефектоскопии поковок, отливок, сварных соединений, многих неметаллических материалов. Эхо-метод используют также для измерения размеров изделий. Измеряют время прихода донного сигнала и, зная скорость ультразвука в материале, определяют толщину изделия при одностороннем доступе. Если толщина изделия неизвестна, то по донному сигналу измеряют скорость, оценивают затухание ультразвука, а по ним определяют физико-механические свойства материалов.
Зеркально-теневой метод используют вместо или в дополнение к эхо-методу для выявления дефектов, дающих слабое отражение ультразвуковых волн в направлении раздельно-совмещенного преобразователя. Дефекты (например, вертикальные трещины), ориентированные перпендикулярно поверхности, по которой перемещают преобразователь (поверхности ввода), дают очень слабый рассеянный сигнал и плохо выявляются эхо-методом. В то же время они ослабляют донный сигнал благодаря тому, что на их поверхности продольная волна трансформируется в головную, которая в свою очередь излучает боковые волны, уносящие энергию. Пример применения зеркально-теневого метода - контроль рельсов на вертикальные трещины в шейке. По чувствительности этот метод обычно в 10-100 раз хуже эхо-метода.
Эхо-зеркальный метод также применяют для выявления дефектов, ориентированных перпендикулярно поверхности ввода. При этом он обеспечивает более высокую чувствительность к таким дефектам, но требует, чтобы в зоне расположения дефектов был достаточно большой участок ровной поверхности (рисунок 22, б). В рельсах, например, это требование не выполняется, поэтому там возможно применение только зеркально-теневого метода. Дефект может быть выявлен совмещенным наклонным преобразователем, расположенным в точке А. Однако, в этом случае зеркально-отраженная волна уходит в сторону и на преобразователь погадает лишь слабый рассеянный сигнал. Преобразователи, расположенные в точках С или D обнаруживают дефект с высокой чувствительностью.
Эхо-зеркальный метод в варианте "тандем" используют для выявления вертикальных трещин и непроваров при контроле сварных соединений. Дефекты некоторых видов сварки, например, непровар при электронно-лучевой сварке, имеют гладкую отражающую поверхность, очень слабо рассеивающую ультразвуковые волны, но такие дефекты хорошо выявляются эхо-зеркальным методом. Дефекты округлой формы (шлаковые включения, поры) дают большой рассеянный сигнал и хорошо регистрируются совмещенным преобразователем в точке А, в то же время зеркальное отражение от них слабое. В результате сравнения отраженных сигналов в точках А и D определяют форму дефекта сварного соединения.
Вариант "косой тандем" применяют, когда расположение преобразователей в одной плоскости затруднительно. Его используют, например, для выявления поперечных трещин в сварных швах. Преобразователи в этом случае располагают по разные стороны валика усиления шва. Углы  и
и  выбирают либо малыми (не более 10°), либо большими (св. 35°) для предотвращения трансформации поперечных волн в продольные. При угле меньше 10° трансформация мала. Угол 35° и больше превосходит третье критическое значение и трансформация отсутствует. Существуют варианты с
выбирают либо малыми (не более 10°), либо большими (св. 35°) для предотвращения трансформации поперечных волн в продольные. При угле меньше 10° трансформация мала. Угол 35° и больше превосходит третье критическое значение и трансформация отсутствует. Существуют варианты с  . Например, излучают поперечную волну с
. Например, излучают поперечную волну с  , а принимают трансформированную продольную волну.
, а принимают трансформированную продольную волну.
Дельта и дифракционно-временной методы также используют для получения дополнительной информации о дефектах при контроле сварных соединений. В варианте, показанном на рисунок 22, в, излучают поперечные, а принимают продольные волны. Эффективная трансформация волн на дефекте произойдет, если угол падения на плоский дефект меньше третьего критического, либо если продольная волна возникает в результате рассеяния на дефекте. Для создания хорошего контакта приемного прямого преобразователя с поверхностью сварного соединения валик усиления зачищают. С помощью этого метода довольно точно определяют положение дефекта вдоль сварного шва, что важно для его автоматической регистрации.
Эхо-теневой метод применяют также при контроле сварных соединений. Например, при автоматическом контроле сварных соединений искатели располагают по обе стороны от шва и принимают как отраженные, так и прошедшие сигналы. Последние используют для контроля качества акустического контакта и обнаружения дефектов, ориентированных таким образом, что эхо-сигналы от них очень слабы.
Теневой и эхо-сквозной методы используют только при двустороннем доступе к изделию, для автоматического контроля изделий простой формы, например, листов в иммерсионной ванне. Перемещение листа вверх и вниз между преобразователями в иммерсионной ванне не изменяет времени прохождения сигналов от излучателя к приемнику, что существенно упрощает конструкцию установки. Чувствительность теневого метода к дефектам в 10-100 раз меньше, чем эхо-метода в связи с большим влиянием помех. Применение эхо-сквозного метода в значительной мере устраняет этот недостаток.
Теневой метод применяют также для контроля изделий с большим уровнем структурной реверберации, т.е. шумов, связанных с отражением ультразвука от неоднородностей, крупных зерен, дефектоскопии многослойных конструкций и изделий из слоистых пластиков. Сквозной сигнал попадает на приемник раньше, чем структурные реверберации, что позволяет его зарегистрировать на фоне шумов. При контроле тонких изделий с очень высоким уровнем структурных шумов более высокую чувствительность обеспечивает временной теневой метод. Теневой и временной методы позволяют обнаруживать крупные дефекты в материалах, где контроль другими акустическими методами затруднен или невозможен: крупнозернистой аустенитной стали, сером чугуне, бетоне, огнеупорном кирпиче.
Теневой метод применяют вместо эхо-метода при исследовании физико-механических свойств материалов с большим затуханием и рассеянием акустических волн, например, при контроле прочности бетона по скорости ультразвука. Для этой цели применяют не только теневой метод, но (в более общем виде) метод прохождения. Например, излучатель и приемник располагают с одной стороны изделия, на одной поверхности и измеряют время и амплитуду сквозного сигнала головной волны.
Локальный метод вынужденных колебаний применяют для измерения малых трещин при одностороннем доступе. Контактный резонансный толщиномер, принцип действия которого показан на рисунок 24, б, в 60-х годах был основным средством толщинометрии. В настоящее время для ручного контроля применяют импульсные толщиномеры. Для автоматического измерения толщины стенок тонких труб лучший результат дает иммерсионный резонансный толщиномер.
Интегральный метод вынужденных колебаний применяют для определения модулей упругости материала по резонансным частотам продольных, изгибных или крутильных колебаний образцов простой формы, вырезанных из материала изделия, т.е. при разрушающих испытаниях. В последнее время этот метод используют также для неразрушающего контроля небольших изделий: абразивных кругов, турбинных лопаток. Появление дефектов или изменение свойств материалов определяют по изменению спектра резонансных частот. Свойства, связанные с затуханием ультразвука (изменение структуры, появление мелких трещин), определяют по изменению добротности колебательной системы.
Интегральный метод свободных колебаний используют для проверки бандажей вагонных колес или стеклянной посуды "по чистоте звона" с субъективной оценкой результатов на слух. Метод с применением электронной аппаратуры и объективной количественной оценкой результатов применяют для контроля физико-механических свойств абразивных кругов, керамики и др. объектов.
Реверберационный, импедансный, велосимметрический, акустико-топографический методы и локальный метод свободных колебаний используют в основном для контроля многослойных конструкций. Реверберационным методом обнаруживают, в основном, нарушения соединений металлических слоев (обшивок) с металлическими или неметаллическими силовыми элементами или наполнителями. Импедансным методом выявляют дефекты соединений в многослойных конструкциях из композиционных полимерных материалов и металлов, применяемых в различных сочетаниях. Велосимметрическим методом и локальным методом свободных колебаний контролируют, в основном, изделия из полимерных композиционных материалов. Акустико-топографический метод применяют для обнаружения дефектов преимущественно в металлических многослойных конструкциях (сотовые панели, биметаллы и т.п.).
Вибрационно-диагностический и шумо-диагностический методы служат для диагностики работающих механизмов. Метод акустической эмиссии применяют в качестве средства исследования материалов, конструкций, контроля изделий (например, при гидроиспытаниях) и диагностики во время эксплуатации. Его важными преимуществами перед другими методами контроля является то, что он реагирует только на развивающиеся, действительно опасные дефекты, а также возможность проверки больших участков или даже всего изделия без сканирования его преобразователем. Основной его недостаток как средства контроля - трудность выделения сигналов от развивающихся дефектов на фоне помех (кавитационных пузырьков в жидкости, подаваемой в объект при гидроиспытаниях, трения в разъемных соединениях и т.д.).
|
|
|
