 |


Ход работы. 1.5 Изучение работы сервопривода. Цель работы. Теоретическая справка
|
|
|
|
Ход работы
Для начала работы необходимо выбрать нужные элементы из библиотеки компонентов.
Рис. 38 - Выбор компонента пьезоэлемента
Рис. 39 - Выбор компонента малая макетная плата
Рис. 40 - Выбор компонента Arduino Uno R3
Пьезоизлучатель необходимо подсоединить к макетной плате, а затем подключить макетную плату и пьезоизлучатель к Arduino Uno так, как показано на рис. 41.
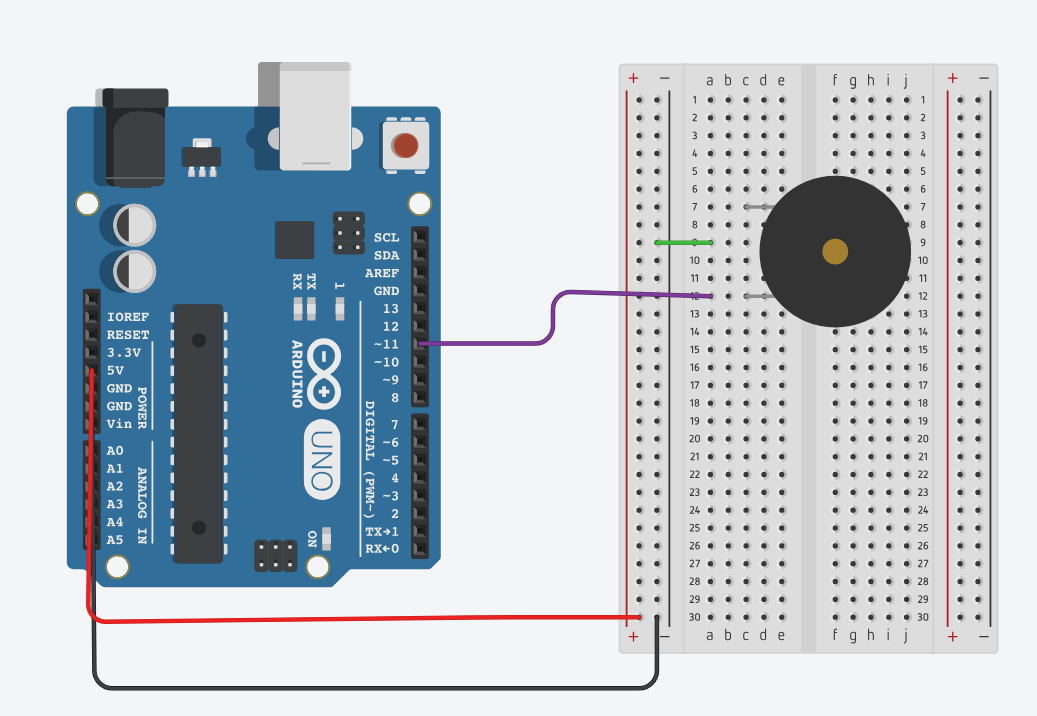
Рис. 41- Схема подключения пьезоизлучателя
Для воспроизведения мелодии необходимо подавать последовательно звуки определенной частоты и длительности. Для генерации звуков определенной частоты и длительности используется Arduino-функция tone (вывод, частота, длительность).
Функция «tone» генерирует на выводе прямоугольный сигнал заданной частоты (с коэффициентом заполнения 50%). Функция также позволяет задавать длительность сигнала. Если длительность сигнала не указана, он будет генерироваться до тех пор, пока не будет вызвана функция noTone (). Значения частот для нот первой и второй октав представлены в таблице 1.
Таблица 1 - Значения частот для нот первой и второй октав
| 1 октава | Обозначение | Частота, Гц | 2 октава | Обозначение | Частота, Гц |
| до | С | до | с | ||
| до-диез | C#(R) | до-диез | с#(г) | ||
| ре | D | ре | d | ||
| ре-диез | D#(S) | ре-диез | d#(s) | ||
| ми | Е | ми | е | ||
| фа | F | фа | f | ||
| фа-диез | F#fT) | фа-диез | f#M | ||
| соль | G | соль | g | ||
| соль-диез | •G#(U) | соль-диез | g#M | ||
| ля | A | ля | а | ||
| си-бимоль | В | си-бимоль | b | ||
| си | H | си | h |
.
Необходимо составить мелодию и занести ее в массив melody, список длительностей нот - в массив duration (). Данные с обозначением нот - в массив notes, а данные с частотами для соответствующих нот - в массив frequency.
|
|
|
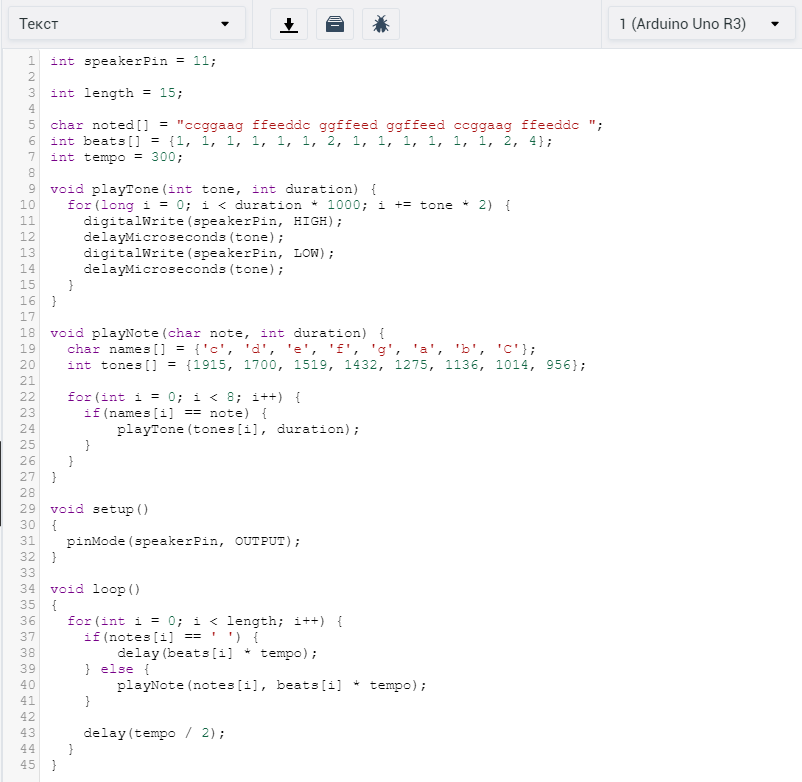
Рис. 42 - Листинг программы для управления пьезоизлучателем
1. 5 Изучение работы сервопривода
Цель работы
Получить навыки программирования микроконтроллера, разработать программу управления электродвигателем - SERVO.
Теоретическая справка
В этой работе изучается такой элемент, как Servo (сервопривод). Сервопривод – это привод, предназначенный для осуществления контроля (угол поворота вала, скорость вращения/движения и так далее) над различными объектами, находящимися в постоянном движении. Контроль производится в зависимости от заданных ему параметров извне. Сервопривод включает в свой состав такие элементы как:
· Приводной механизм – к примеру, это может быть электромотор. Благодаря ему становится возможным управление скоростью нужного диапазона в определённый временной момент;
· Датчики – осуществляют контроль над необходимыми параметрами. Могут быть предназначены для отслеживания положения, усилия, поворота угла или скорости вращения объекта;
· Блок управления – немало важный элемент, так как именно благодаря ему происходит поддержание требуемых параметров в автоматическом режиме;
· Блок питания – сервопривод.
Для использования функций сервопривода в начале исполняемого кода следует подключить библиотеку «Servo» делается это строкой #include < Servo. h>. Далее представлены основные функции для работы с сервоприводом:
Servo. attach(pin, min, max) – прикрепляет переменную сервопривода к контакту на доске. Где min - (необязательно) - значение PWM (в микросекундах), которое будет соответствовать минимальным 0 градусам, max - (необязательно)- значение PWM (в микросекундах), которое будет соответствовать максимуму 180 градусов;
Servo. write(angle) – позиционирует стержень серводвигателя под заданным углом, angle – (в градусах) угол, под которым будет располагаться стержень;
|
|
|
Servo. writeMicroseconds(uS) – то же, что и функция write (), но запрашивает ввод в микросекундах, где uS - значение в микросекундах для поворота стержня в определенную степень;
Servo. read() – считывает текущее значение угла сервопривод;
Servo. attached() – проверяет, подключен ли сервопривод к штифту;
Servo. detach – освобождает сервопривод от указанного pin-вывода;
|
|
|
