 |


8.6. Изменение сопротивления на выводах генератора при асинхронном ходе
|
|
|
|
Рассмотрим схему на рис. 8. 14. Генератор Г работает на энергосистему С. На выводах генератора установлено реле сопротивления, включенное на фазный ток и напряжение.
Примем также, что скольжение  , т. е изменение угла
, т. е изменение угла  происходит очень медленно. В таком случае асинхронный момент мал, им можно пренебречь и учитывать только синхронный момент (мощность). При
происходит очень медленно. В таком случае асинхронный момент мал, им можно пренебречь и учитывать только синхронный момент (мощность). При  генератор следует представлять синхронным сопротивлением
генератор следует представлять синхронным сопротивлением  . В аналитических выкладках примем пока сопротивление генератора
. В аналитических выкладках примем пока сопротивление генератора  и энергосистемы Zc.
и энергосистемы Zc.
При асинхронном ходе частоты  и
и  неодинаковы. Однако с учетом, можно считать = и оперировать с одночастотным сигналом со средневзвешенной частотой
неодинаковы. Однако с учетом, можно считать = и оперировать с одночастотным сигналом со средневзвешенной частотой  Такое упрощение вполне допустимо и будет использовано для получения зависимости Zp (Ег, Ес, ).
Такое упрощение вполне допустимо и будет использовано для получения зависимости Zp (Ег, Ес, ).
Рис. 8. 14. Схема энергосистемы (а) и диаграмма (б) для определения zp.
Когда скольжение  , то появится значительный асинхронный момент генератора. В таком случае генератор должен быть представлен сопротивлением, зависящим от скольжения
, то появится значительный асинхронный момент генератора. В таком случае генератор должен быть представлен сопротивлением, зависящим от скольжения  (s). Это обстоятельство будет учтено в дальнейшем при анализе этого случая.
(s). Это обстоятельство будет учтено в дальнейшем при анализе этого случая.
Для одночастотного сигнала ток в линии
 , (8. 12)
, (8. 12)
где  и q = Ес/Ег.
и q = Ес/Ег.
Напряжение в месте установки реле  . Полное сопротивление, измеряемое реле, составляет
. Полное сопротивление, измеряемое реле, составляет
 . (8. 13)
. (8. 13)
Учитывая формулу для тока (8. 12), выражение для измеряемого сопротивления приведем к виду
 (8. 14)
(8. 14)
Если генератор не возбужден, то, как следует из формулы (8. 14), реле сопротивления измерит  . При Ес = 0 имеем Zp = Zc. Таким образом, в данных режимах реле измерит либо сопротивление генератора, либо сопротивление системы. В других режимах это будет фиктивное сопротивление, обусловленное значениями токов и напряжений
. При Ес = 0 имеем Zp = Zc. Таким образом, в данных режимах реле измерит либо сопротивление генератора, либо сопротивление системы. В других режимах это будет фиктивное сопротивление, обусловленное значениями токов и напряжений
|
|
|

В соответствии с формулой (8. 14) можно построить диаграмму, на которой будет отмечено геометрическое место концов вектора Zp в зависимости от угла и от отношения q = Ес / Ег (рис. 8. 15). При построении диаграммы примем  и Zc=Хс.
и Zc=Хс.
|
|
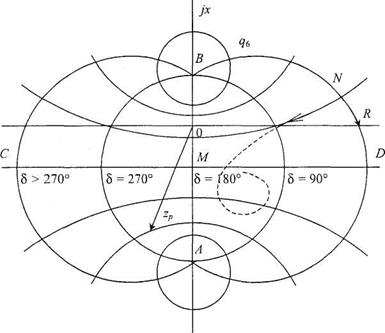
Рис. 8. 15. Диаграмма zp(q, )
При изменении угла от 0° до 360° выражение  соответствует вращающемуся вектору, конец которого вычерчивает окружность с центром в начале координат. Выражение
соответствует вращающемуся вектору, конец которого вычерчивает окружность с центром в начале координат. Выражение  соответствует окружности, центр которой смещен на 1, 0. В результате обращений этой окружности 1/(1-q
соответствует окружности, центр которой смещен на 1, 0. В результате обращений этой окружности 1/(1-q  ) конец вектора Zp также будет перемещаться по окружности [18]. Не рассматривая здесь метод определения местоположения центра и радиуса обращения окружности, укажем лишь на порядок построения интересующей нас диаграммы.
) конец вектора Zp также будет перемещаться по окружности [18]. Не рассматривая здесь метод определения местоположения центра и радиуса обращения окружности, укажем лишь на порядок построения интересующей нас диаграммы.
На комплексной плоскости сопротивлений концы векторов Zг и Zc обозначим соответственно А и В. Отрезок АВ изображает вектор Z. Центры окружностей, по которым скользит конец вектора Zp при изменении угла , находятся на продолжении отрезка АВ вниз от точки А при q > 1 и вверх от точки В при q < 1. Положение центра и радиус окружностей определяется величиной q. На рис. 8. 15 показано несколько таких окружностей, причем  . При q=1 радиус окружности равен бесконечности и окружность вырождается в прямую CD. Эта прямая проходит через середину
. При q=1 радиус окружности равен бесконечности и окружность вырождается в прямую CD. Эта прямая проходит через середину
отрезка АВ (точка М) и перпендикулярна ему.
При постоянном значении угла , но переменном q конец вектора Zp также располагается на дугах окружностей, которые строятся следующим образом. Центры этих окружностей располагаются на прямой CD. Дополнительным условием для построения окружностей является условие их прохождения через точки А и В. Отрезок АВ может рассматриваться как дуга окружности бесконечно большого радиуса. Конец вектора Zp располагается на этом отрезке при угле = 180°. Геометрическим местом концов вектора Zp при < 180° являются дуги окружностей справа от отрезков АВ. При угле
|
|
|
> 180° конец вектора Zp располагается на дугах окружностей слева от отрезка АВ. Пользуясь диаграммой, можно определить сопротивление Zp при любых значениях угла и коэффициента q.
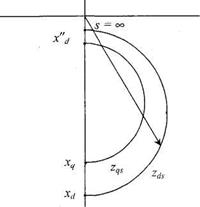
В предыдущих рассуждениях принято, что сопротивление генератора неизменно. В асинхронном режиме это сопротивление меняется и зависит от скольжения s. Это обстоятельство необходимо учитывать при построении диаграммы Zp (Ег, Ес, , s). На рис. 8. 16 показана зависимость сопротивления невозбужденного генератора от скольжения ротора s [14]. В силу несимметрии ротора сопротивление различно по продольной  , и поперечной
, и поперечной  осям. Рассмотрим сопротивление zds. При отсутствии скольжения турбогенератор замещается синхронным сопротивление xd. При скольжении
осям. Рассмотрим сопротивление zds. При отсутствии скольжения турбогенератор замещается синхронным сопротивление xd. При скольжении  машина представляется ее сверхпереходным сопротивление x" d. В области 0< s <
машина представляется ее сверхпереходным сопротивление x" d. В области 0< s <  геометрическим местом концов вектора сопротивления турбогенератора является характеристика, показанная на рис. 8. 15. В первом приближении она близка к полуокружности, построенной на отрезке xd - x" d, как на диаметре. В некоторых точках этой характеристики указаны значения скольжения, при котором определены сопротивления. Характеристика построена в области отрицательных значений х. Это обусловлено тем, что в данном случае измерение осуществляется с помощью реле сопротивления, для которого за положительное направление сопротивления принято направление от места установки реле к сети.
геометрическим местом концов вектора сопротивления турбогенератора является характеристика, показанная на рис. 8. 15. В первом приближении она близка к полуокружности, построенной на отрезке xd - x" d, как на диаметре. В некоторых точках этой характеристики указаны значения скольжения, при котором определены сопротивления. Характеристика построена в области отрицательных значений х. Это обусловлено тем, что в данном случае измерение осуществляется с помощью реле сопротивления, для которого за положительное направление сопротивления принято направление от места установки реле к сети.
jx
| s = 0. 005 |
 R
R
|
|
|
