 |


2.3.3 Балансировочные кривые. Рис. 49. Балансировочные кривые δв = f (V): а) без стабилизатора, б) со стабилизатором
|
|
|
|
2. 3. 3 Балансировочные кривые
Из выражения (2. 14) видно, что угол dВ = f (V, XТ, α СТ). При прочих равных условиях
dВ = f (V). (2. 18)
Зависимость (2. 18) называется балансировочной кривой. Она показывает величину балансировочного угла при различной центровке вертолета ХТ и соответствующей скорости полета.
Для каждого типа вертолета балансировочные кривые приводятся в Инструкции экипажу.
Так как на практике угол dВ определить невозможно, то в дальнейшем под балансировочным углом будем понимать угол отклонения кольца автомата перекоса при соответствующем отклонении РУ.
Рассмотрим влияние на ход балансировочной кривой продольной центровки вертолета. На основании выражения (2. 14) при V = 0; dВ = – dТ, на величину балансировочного угла влияет только значение центровки (режим висения вертолета).
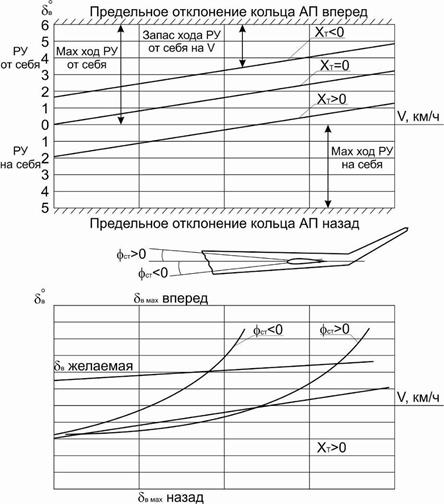
Рис. 49. Балансировочные кривые δ в = f (V): а) без стабилизатора, б) со стабилизатором
Так при Хт = 0 → dТ = dВ = 0, то есть точка начала балансировочной кривой (рис. 49) находится в начале координат, а ручка управления в нейтральном положении. При Хт > 0, dТ > 0, dВ < 0, начало балансировочной кривой смещается вниз, в об-
ласть отрицательных значений угла dВ. В данном случае РУ для балансировки вертолета взята «на себя».
При Хт < 0, dТ < 0, dВ > 0, начало балансировочной кривой смещается вверх в область положительных значений dВ, РУ отклонена «от себя».
С переходом в поступательный полет (V > 0) естественный завал оси конуса НВ назад (а1) возрастает пропорционально скорости полета, что вызывает увеличение dВ. Таким образом, чем больше скорость полета, тем на большую величину приходится летчику отклонять РУ «от себя». При отсутствии стабилизатора изменение dВ = f (V) – линейное.
|
|
|
2. 3. 4 Влияние стабилизатора
Постановка стабилизатора существенно влияет на ход балансировочных кривых, так как с увеличением V полета эффективность стабилизатора (Yст) возрастает, что вызывает рост момента на кабрирование от Yст на плече  lст. Величина и направление этого момента зависит и от установочного угла стабилизатора. Чем больше jСТ, тем больше пикирующий момент от него, тем меньше приходится отклонять РУ «от себя» для балансировки вертолета.
lст. Величина и направление этого момента зависит и от установочного угла стабилизатора. Чем больше jСТ, тем больше пикирующий момент от него, тем меньше приходится отклонять РУ «от себя» для балансировки вертолета.
На рисунке 49. б показано, что за счет увеличения эффективности стабилизатора с ростом скорости полета при jст < 0 требуется уже на малых скоростях полета значительное отклонение РУ «от себя». Для достижения Vmax не хватит хода РУ «от себя», не говоря уже о запасе хода РУ в продольном отношении (разность между предельным отклонением тарелки АП и потребным его отклонением на данной скорости).
При jст > 0 значительное отклонение РУ (тарелки АП) «от себя» наблюдается на больших V полета (рис. 49. б).
На этих скоростях полета запас хода РУ «от себя» также отсутствует, что существенно усложняет технику пилотирования. Для удобства пилотирования летчиком вертолета желательно, чтобы на средних скоростях полета, на которых вертолет больше всего летает, РУ занимала положение, близкое к нейтральному. Это, в свою очередь, приведет и к минимальным углам тангажа на этих режимах полета, и к увеличению запаса управления.
На рисунке 50 приведены реальные балансировочные кривые вертолета Ми-8, полученные в результате летных испытаний, которые указывают положения рычагов управления для скоростей установившихся режимов полета при различных центровках вертолета.
При увеличении скорости от 0 до 45 км/час наблюдается резкое увеличение кабрирующих моментов от несущего винта и от стабилизатора. Дело в том, что с увеличением скорости полета увеличиваются маховые движения лопастей, увеличивается завал конуса вращения лопастей несущего винта назад, увеличивается кабрирующий момент несущего винта.
|
|
|

|
|
|
