 |


Глава 1. Устройство и принцип работы асинхронного электродвигателя
|
|
|
|
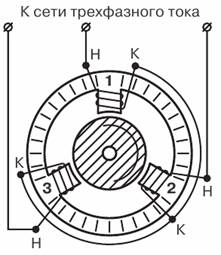
Рисунок 2. Схема асинхронного электродвигателя Доливо-Добровольского
На полюсах железного сердечника кольцевой формы, называемого статором электродвигателя, помещены три обмотки, сети трехфазного тока 0 расположенные одна относительно другой под углом 120°.
Внутри сердечника укреплен на оси металлический цилиндр, называемый ротором электродвигателя.
Если обмотки соединить между собой так, как показано на рисунке, и подключить их к сети трехфазного тока, то общий магнитный поток, создаваемый тремя полюсами, окажется вращающимся.
На рисунке 3 показан график изменения токов в обмотках двигателя и процесс возникновения вращающегося магнитного поля.
Рассмотрим - подробнее этот процесс.
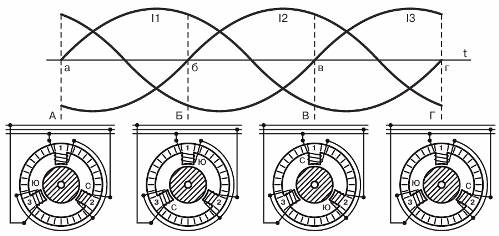
Рисунок 3. Получение вращающегося магнитного поля
В положении «А» на графике ток в первой фазе равен нулю, во второй фазе он отрицателен, а в третьей положителен. Ток по катушкам полюсов потечет в направлении, указанном на рисунке стрелками.
Определив по правилу правой руки направление созданного током магнитного потока, мы убедимся, что на внутреннем конце полюса (обращенном к ротору) третьей катушки будет создан южный полюс (Ю), а на полюсе второй катушки — северный полюс (С). Суммарный магнитный поток будет направлен от полюса второй катушки через ротор к полюсу третьей катушки.
 В положении «Б» на графике ток во второй фазе равен нулю, в первой фазе он положителен, а в третьей отрицателен. Ток, протекая по катушкам полюсов, создает на конце первой катушки южный полюс (Ю), на конце третьей катушки северный полюс (С). Суммарный магнитный поток теперь будет направлен от третьего полюса через ротор к первому полюсу, т. е. полюсы при этом переместятся на 120°.
В положении «Б» на графике ток во второй фазе равен нулю, в первой фазе он положителен, а в третьей отрицателен. Ток, протекая по катушкам полюсов, создает на конце первой катушки южный полюс (Ю), на конце третьей катушки северный полюс (С). Суммарный магнитный поток теперь будет направлен от третьего полюса через ротор к первому полюсу, т. е. полюсы при этом переместятся на 120°.
|
|
|
В положении «В» на графике ток в третьей фазе равен нулю, во второй фазе он положителен, а в первой отрицателен. Теперь ток, протекая по первой и второй катушкам, создаст на конце полюса первой катушки — северный полюс (С), а на конце полюса второй катушки — южный полюс (Ю), т. е. полярность суммарного магнитного поля переместится еще на 120°. В положении «Г» на графике магнитное поле переместится еще на 120°.
Таким образом, суммарный магнитный поток будет менять свое направление с изменением направления тока в обмотках статора (полюсов).
При этом за один период изменения тока в обмотках магнитный поток сделает полный оборот. Вращающийся магнитный поток будет увлекать за собой цилиндр, и мы получим таким образом асинхронный электродвигатель.
Напомним, что на рисунке 3 обмотки статора соединены «звездой», однако вращающееся магнитное поле образуется и при соединении их «треугольником».
Если мы поменяем местами обмотки второй и третьей фаз, то магнитный поток изменит направление своего вращения на обратное.
Такого же результата можно добиться, не меняя местами обмотки статора, а направляя ток второй фазы сети в третью фазу статора, а третью фазу сети — во вторую фазу статора.
Таким образом, изменить направление вращения магнитного поля можно переключением двух любых фаз.
Мы рассмотрели устройство асинхронного двигателя, имеющего на статоре три обмотки. В этом случае вращающееся магнитное поле двухполюсное и число его оборотов в одну секунду равно числу периодов изменения тока в одну секунду.
 Если на статоре разместить по окружности шесть обмоток, то будет создано четырехполюсное вращающееся магнитное поле. При девяти обмотках поле будет шестиполюсным.
Если на статоре разместить по окружности шесть обмоток, то будет создано четырехполюсное вращающееся магнитное поле. При девяти обмотках поле будет шестиполюсным.
При частоте трехфазного тока f, равной 50 периодам в секунду, или 3000 в минуту, число оборотов n вращающегося поля в минуту будет:
при двухполюсном статоре n = (50 х 60) / 1 = 3000 об/мин,
|
|
|
при четырехполюсном статоре n = (50 х 60) / 2 = 1500 об/мин,
при шестиполюсном статоре n = (50 х 60) / 3 = 1000 об/мин,
при числе пар полюсов статора, равном p: n = (f х 60) / p,
Итак, мы установили скорость вращения магнитного поля и зависимость ее от числа обмоток на статоре двигателя.
Ротор же двигателя будет, как нам известно, несколько отставать в своем вращении.Это отставание называется скольжением.
| Скольжение асинхронного двигателя |
| В результате взаимодействия магнитного поля с токами в роторе асинхронного двигателя создается вращающий электромагнитный момент, стремящийся уравнять скорость вращения магнитного поля статора и ротора. Разность скоростей вращения магнитного поля статора и ротора асинхронного двигателя характеризуется величиной скольжения s = (n1 - n2) / n2, где n1- синхронная скорость вращения поля, об/мин, n2 - скорость вращения ротора асинхронного двигателя, об/мин. При работе с номинальной нагрузкой скольжение обычно мало, так для электродвигателя, например, с n1 = 1500 об/мин, n2 = 1 460 об/мин, скольжение равно:s = ((1500 - 1460) / 1500) х 100 = 2,7% Асинхронный двигатель не может достичь синхронной скорости вращения даже три отсоединенном механизме, так как при ней проводники ротора не будут пересекаться магнитным полем, в них не будет наводиться ЭДС и не будет тока. Асинхронный момент при s = 0 будет равен нулю. В начальный момент пуска в обмотках ротора протекает ток с частотой сети. По мере ускорения ротора частота тока в нем будет определяться скольжением асинхронного двигателя: f2 = s х f1, где f1 - частота тока, подводимого к статору. Сопротивление ротора зависит от частоты тока в нем, причем чем больше частота, тем больше его индуктивное сопротивление. С увеличением индуктивного сопротивления ротора увеличивается сдвиг фаз между напряжением и током в обмотках статора. При пуске асинхронных двигателей коэффициент мощности поэтому значительно ниже, чем при нормальной работе. Величина тока определяется эквивалентным значением сопротивления электродвигателя и приложенным напряжением. Величина эквивалентного сопротивления асинхронного двигателя с изменением скольжения изменяется по сложному закону. При уменьшении скольжения в пределах 1 - 0,15 сопротивление увеличивается, как правило, не более чем в 1,5 раза, в пределах от 0,15 до sном в 5-7 раз по отношению к начальному значению при пуске. Ток по величине изменяется обратно пропорционально изменению эквивалентного сопротивления Таким образом, при пуске до скольжения порядка 0,15 ток опадает незначительно, а в дальнейшем быстро уменьшается. |
|
|
|
Как видим. Скольжение ротора очень небольшое. Так, например, при холостом ходе двигателя разность скоростей составляет всего 3%, а при нагрузке 5 - 7%. Следовательно, обороты асинхронного двигателя при изменении нагрузки изменяются в очень небольших пределах, что является одним из его достоинств.
|
|
|
