 |


Замкнутые дифференциальные механизмы.
|
|
|
|

Рис.3.5. Схема замкнутого дифференциального механизма.
Механизмы, у которых два из трёх основных звеньев соединены между собой дополнительной передачей, называются замкнутыми. Так, в механизме, приведённом на рис.3.5, ведущее звено 1 и ведомое 3 замкнуты передачей с колёсами a,b,c,d. При определении передаточного отношения этого механизма в формуле Виллиса скорость одного из основных звеньев выражают через скорость текущего звена. В рассматриваемом случае  , следовательно, на основании формул (3.15) и (3.13).
, следовательно, на основании формул (3.15) и (3.13).  ,
,
откуда  (3.16)
(3.16)
Конический дифференциал
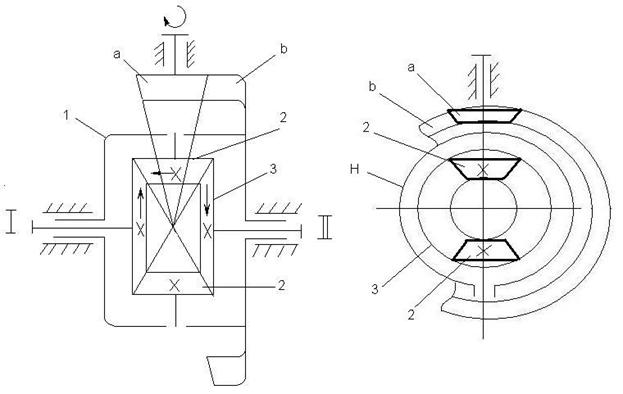
Рис. 3.6. Конический дифференциал.
Конический дифференциал получил широкое применение в транспортных машинах, металлорежущих станках, а также во многих счётных машинах и приборах как суммирующий механизм.
На рис.3.6. представлена схема дифференциала автомобиля. От ведущего вала через коническую передачу a-b приводятся во вращение водило H, в котором смонтированы сателлиты 2 и  . При вращении водила зубья сателлитов надавливают на центральные колёса 3 и 1, вследствие чего вращаются валы | и ||, связанные с колёсами заднего моста автомобиля.
. При вращении водила зубья сателлитов надавливают на центральные колёса 3 и 1, вследствие чего вращаются валы | и ||, связанные с колёсами заднего моста автомобиля.
Кинематические соотношения конического дифференциала (рис.3.6) определяется по формуле Виллиса. Числа зубьев центральных колёс 1 и 3 одинаковые, поэтому  (стрелки направлены в противоположные стороны), и согласно формуле (3.13) угловая скорость водила
(стрелки направлены в противоположные стороны), и согласно формуле (3.13) угловая скорость водила  . В автомобиле конический дифференциал позволяет производить перераспределение угловой скорости, полученной от карданного вала на ведущие колёса при движении по кривой. В другом случае эти механизмы позволяют производить сложение скоростей, получаемых от различных источников.
. В автомобиле конический дифференциал позволяет производить перераспределение угловой скорости, полученной от карданного вала на ведущие колёса при движении по кривой. В другом случае эти механизмы позволяют производить сложение скоростей, получаемых от различных источников.
|
|
|
Волновые передачи
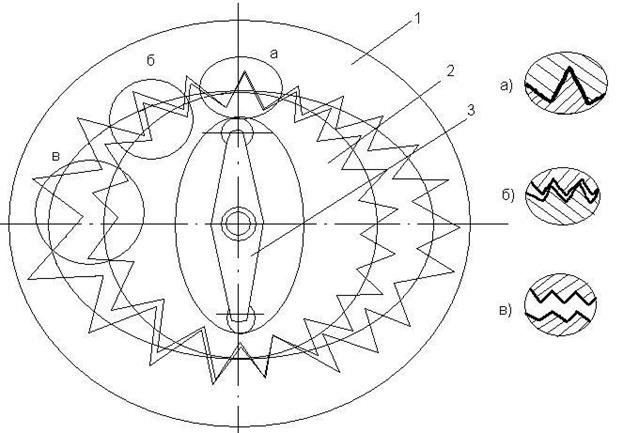
Рис. 3.7. Волновая передача: a- зона полного зацепления; б - частичного; с - зацепление отсутствует.
Волновая передача. (Рис. 3.7) состоит из жесткого 1 и гибкого 2 зубчатых колёс и генератора волн 3, составленных по схеме планетарное передачи. Вставленный в гибкое колесо генератор волн (водило) упруго деформирует его, превращая из круглого в эллиптическое. Числа зубьев жесткого Z2 и гибкого Z1 колёс не одинаковы, поэтому при неподвижном жестком колесе за один оборот генератора гибкое звено повернётся на число угловых шагов зубьев Z1-Z2. Вследствие того, что передача вращения осуществляется в механизме, имеющим подвижные оси, кинематические соотношения в таких механизмах определяются по формуле Виллиса при  .
.
При неподвижном гибком колесе 2( ) передаточное отношение между генератором волн 3 (водилом) и жестким колесом 1 с учётом, что
) передаточное отношение между генератором волн 3 (водилом) и жестким колесом 1 с учётом, что  ,
,  ,
,
откуда  и
и  (3.17)
(3.17)
При неподвижном жестком колесе 1 передаточное отношение между генератором и гибким колесом 2
 (3.18)
(3.18)
Механизмы с переменным передаточным отношением
Некруглые колёса.

Рис.3.8 Схема механизма с некруглыми колёсами.
В машиностроении механизмы с некруглыми колёсами применяются при передаче движения с переменным передаточным отношением, при небольших угловых скоростях и параллельном расположении осей, а в приборостроении – чаще всего для воспроизведения нелинейных функций. Наибольше распространение получили некруглые колёса, центроиды которых имеют форму эллипса (рис 3.8). При их проектировании необходимо выполнить условие, чтобы сумма двух любых сопряжённых радиус-векторов была равна межосевому расстоянию:

Теория проектирования некруглых колёс рассматривается в специальной литературе.
Кулачковые механизмы.
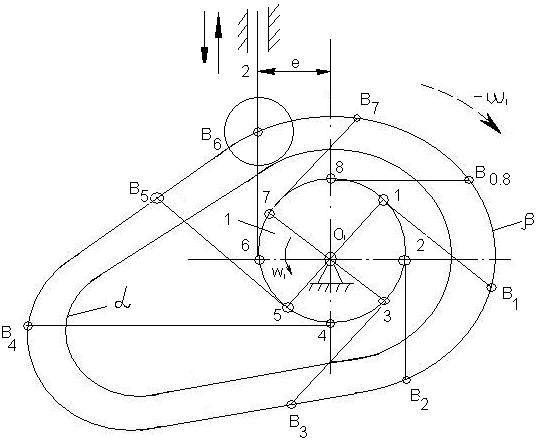
Рис.3.9. Схема кулачкового механизма с поступательно движущимся толкателем.
Кинематический анализ кулачкового механизма сводится к определению скорости толкателя  при заданной угловой скорости кулачка
при заданной угловой скорости кулачка  для этой цели часто пользуются графическим способом определения скоростей и ускорений толкателя, используя метод графического дифференцирования графика перемещений толкателя. Применяют также метод планов скоростей и ускорений. Перемещение толкателя для различных положений кулачка (рис.3.9) определяют способом засечек в сочетании с методом обращения движения.
для этой цели часто пользуются графическим способом определения скоростей и ускорений толкателя, используя метод графического дифференцирования графика перемещений толкателя. Применяют также метод планов скоростей и ускорений. Перемещение толкателя для различных положений кулачка (рис.3.9) определяют способом засечек в сочетании с методом обращения движения.
|
|
|
Рассмотрим внецентренный кулачковый механизм (рис.3.9), ведущее звено которого (кулачок) очерчено рабочим профилем  . Нанесём теоретический профиль – равноотстоящую от рабочего профиля кривую
. Нанесём теоретический профиль – равноотстоящую от рабочего профиля кривую  , проходящую через центр ролика B. Придадим всему механизму вращение со скоростью (
, проходящую через центр ролика B. Придадим всему механизму вращение со скоростью ( ); кулачок остановится, а толкатель 2 будет совершать поступательные движения со скоростью и вращательное со скоростью () так, что центр ролика B будет двигаться по кривой . Если из центра О1 провести окружность радиусом l, то длина касательных к этой окружности от основания до пересечения с кривой будет характеризоваться положениями толкателя относительно кулачка. График перемещения толкателя получим, если по оси абсцисс отложить в масштабе время одного оборота кулачка, а по оси ординат – разность длин касательных, проведённых к окружности радиуса l, в рассматриваемый момент времени и момент, соответствующий наилучшему положению толкателя (например, 4B4 – 3В3 и т.д.).
); кулачок остановится, а толкатель 2 будет совершать поступательные движения со скоростью и вращательное со скоростью () так, что центр ролика B будет двигаться по кривой . Если из центра О1 провести окружность радиусом l, то длина касательных к этой окружности от основания до пересечения с кривой будет характеризоваться положениями толкателя относительно кулачка. График перемещения толкателя получим, если по оси абсцисс отложить в масштабе время одного оборота кулачка, а по оси ординат – разность длин касательных, проведённых к окружности радиуса l, в рассматриваемый момент времени и момент, соответствующий наилучшему положению толкателя (например, 4B4 – 3В3 и т.д.).
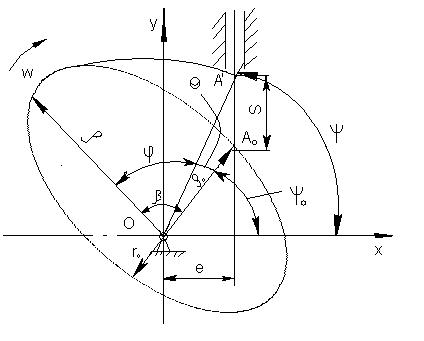
Рис.3.10. к аналитическому анализу внецентренного кулачкового механизма.
Для кулачковых механизмов, применяемых для точного воспроизведения заданного движения ведомого звена (приборостроении, счетно-решающие устройства, быстроходные механизмы и др.), используют аналитический метод кинематического исследования. Установим кулачок так, чтобы толкатель занимал крайнее положение  (рис3.10).Проведём оси координат x и y через центр вращения кулачка О и соединим начало координат О с точкой профиля кулачка А, расположенной на максимальном расстоянии от центра О и точкой радиус-векторами
(рис3.10).Проведём оси координат x и y через центр вращения кулачка О и соединим начало координат О с точкой профиля кулачка А, расположенной на максимальном расстоянии от центра О и точкой радиус-векторами  и
и  , равными радиусу основной шайбы
, равными радиусу основной шайбы  (наименьшему вектору профиля кулачка). При повороте кулачка на угол
(наименьшему вектору профиля кулачка). При повороте кулачка на угол  точка А займёт положение
точка А займёт положение  будет представлять собой перемещение толкателя. Из рис3.10 следует, что
будет представлять собой перемещение толкателя. Из рис3.10 следует, что
|
|
|
 (3.19)
(3.19)
где  , а
, а  и
и  .
.
Задаваясь углом , находим текущий радиус-вектор и угол поворота кулачка  . Таким образом устанавливается связь между углом поворота кулачка и перемещением толкателя S. Скорость и ускорение толкателя определяют по формулам
. Таким образом устанавливается связь между углом поворота кулачка и перемещением толкателя S. Скорость и ускорение толкателя определяют по формулам
 ;
;
 ;
;
Полученные зависимости для внецентренного кулачкового механизма приемлемы и для центральных кулачковых механизмов, у которых смещение l=0. При этом условии  и, следовательно, закон изменения перемещения S толкателя с остриём.
и, следовательно, закон изменения перемещения S толкателя с остриём.
|
|
|
