 |


13.9. Система пуска синхронного двигателя
|
|
|
|
13. 9. Система пуска синхронного двигателя
Как мы показали выше, синхронное вращение ротора обеспечивается «магнитным сцеплением» полюсов ротора с вращающимся магнитным полем статора. Это можно объяснить следующим образом. Пусть в момент включения двигателя направление питающего тока в обмотках статора соответствует рис. 13. 12, а. В этот момент на неподвижный ротор будет действовать пара сил F, стремящихся повернуть его по часовой стрелке. Через полпериода направление тока в обмотках статора изменится на противоположное (рис. 13. 12, б).
В первый момент пуска двигателя вращающееся магнитное поле статора возникает практически мгновенно. Ротор же, обладая значительной инерционной массой, прийти в синхронное вращение сразу не сможет. Его надо «разогнать» до подсинхронной скорости каким-то дополнительным устройством.
Долгое время роль разгонного двигателя играл обычный асинхронный двигатель, механически соединенный с синхронным. Ротор синхронного двигателя приводится во вращение до подсинхронной скорости. Далее двигатель сам втягивается в синхронизм.
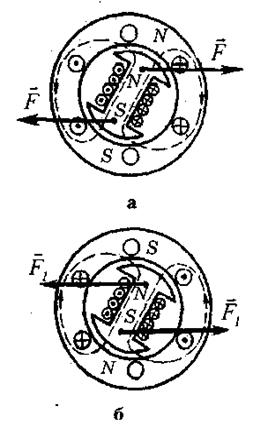
Рис. 13. 12
Таким образом, характерной особенностью синхронного двигателя является необходимость предварительного разгона ротора.
Обычно мощность пускового двигателя составляет 5 – 15 % от мощности синхронного двигателя. Это позволяет пускать в ход синхронный двигатель только вхолостую или при малой нагрузке на валу. Применение пускового двигателя мощностью, достаточной для пуска синхронного двигателя под нагрузкой делает такую установку громоздкой и дорогой.
В последнее время используется так называемая система асинхронного пуска синхронных двигателей. С этой целью в полюсные наконечники забивают стержни, напоминающие собою короткозамкнутую обмотку асинхронного двигателя (рис. 13. 13).
|
|
|
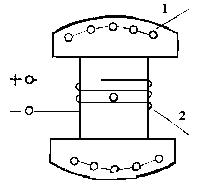
Рис. 13. 13 Ротор синхронного двигателя с пусковой обмоткой:
1 – пусковая обмотка; 2 – обмотка возбуждения
В начальный период пуска синхронный двигатель работает как асинхронный, а в последующем – как синхронный. В целях безопасности, обмотку возбуждения в начальном периоде пуска закорачивают, а на заключительном подключают к источнику постоянного тока.
13. 10. Реактивный синхронный двигатель
В лабораторной практике, в быту и в маломощных механизмах применяют так называемые реактивные синхронные двигатели. От обычных классических машин они отличаются лишь конструкцией ротора. Ротор здесь не является магнитом или электромагнитом, хотя по форме напоминает собой полюсную систему (рис. 13. 14).
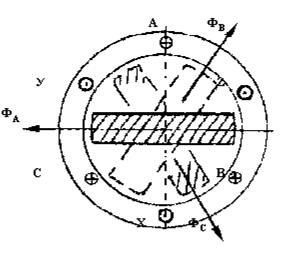
Рис. 13. 14 Принцип действия реактивного синхронного двигателя
Принцип действия реактивного синхронного двигателя отличен от рассмотренного выше.
В школьной практике иногда, при отсутствии специальных синхронных двигателей, возникает необходимость в синхронной передаче.
Эту проблему можно решить с помощью обычного асинхронного двигателя, если придать ротору следующую геометрическую форму (рис. 13. 15).
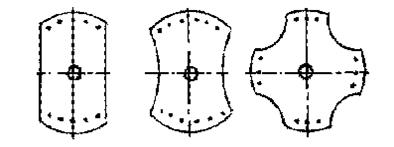
Рис. 13. 15 Модернизация ротора асинхронного двигателя
13. 11. Шаговый двигатель
Этот тип двигателя является машиной постоянного тока, хотя принцип действия его напоминает синхронный реактивный двигатель. Как видно из рис. 13. 16, статор двигателя имеет шесть пар выступающих полюсов.
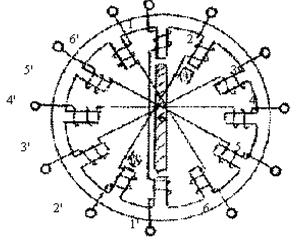
Рис. 13. 16
Каждые две катушки, расположенные на противоположных полюсах статора, образуют обмотку управления, включаемую в сеть постоянного тока. Ротор – двухполюсный. Если подключить к источнику постоянного тока катушки полюсов 1 – 1', то ротор расположится вдоль этих полюсов. Если задействовать катушки полюсов 2 – 2', а катушки полюсов 1 – 1' обесточить, то ротор повернется и займет положение вдоль полюсов 2 – 2'. Такой же поворот ротора произойдет, если включить в сеть катушки полюсов 3 – 3'. Так, шагами, ротор будет «следовать» за своей обмоткой управления.
|
|
|
|
|
|
