 |


14.4. Скорость вращения магнитного поля. Скольжение
|
|
|
|
14. 4. Скорость вращения магнитного поля. Скольжение
Известно, что скорость магнитного поля определяется и частотой переменного тока. В частности, если трехфазную обмотку двигателя разместить в шести пазах на внутренней поверхности статора, то за половину периода переменного тока вектор магнитной индукции сделает пол-оборота, а за полный период – один оборот. В этом случае обмотка статора создает магнитное поле с одной парой полюсов и называется двухполюсной.
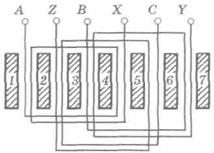
Рис. 14. 9
Если обмотка статора состоит из шести катушек (по две последовательно соединенные катушки на каждую фазу), размещенных в двенадцати пазах, то за половину периода переменного тока вектор магнитной индукции повернется на четверть оборота, а за полный период – на пол-оборота. Вместо двух полюсов на трех обмотках теперь магнитное поле статора имеет четыре полюса (две пары полюсов).
Скорость вращения магнитного поля обратно пропорциональна числу пар полюсов.
 14. 1
14. 1
где ƒ — частота переменного тока в Гц, а коэффициент 60 появился из-за того, что n1 принято измерять в оборотах в минуту.
Поскольку число пар полюсов может быть только целым, то скорость вращения магнитного поля может принимать не произвольные, а только определенные значения:
| P | |||||||||
| n1 |
Ротор асинхронного двигателя вращается в ту же сторону, что n магнитное поле, со скоростью, несколько меньшей скорости вращения магнитного поля, так как только в этом случае в обмотке ротора будут индуцироваться ЭДС и токи, и на ротор будет действовать вращающий момент. Обозначим скорость вращения ротора n2. Тогда величина n1 – n2 , которая называется скоростью скольжения, представляет собой относительную скорость магнитного поля и ротора, а степень отставания ротора от магнитного поля, выраженная в процентах, называется скольжением s:
|
|
|
 14. 2
14. 2
Скольжение асинхронного двигателя при номинальной нагрузке обычно составляет 3–7 %. При увеличении нагрузки скольжение увеличивается, и двигатель может остановиться.
Вращающий момент М асинхронного двигателя создается благодаря взаимодействию магнитного потока поля статора Ф с индуцированным в обмотке ротора током I2, поэтому величина его пропорциональна произведению I2Ф. Двигатель будет работать устойчиво с постоянной скоростью ротора при равновесии моментов, т. е. тогда, когда вращающий момент Мер равен тормозному моменту на валу двигателя M mop:
 14. 3
14. 3
Любой нагрузке машины соответствует определенное число оборотов ротора n2 и определенное скольжение S.
Обратите внимание, что частота вращения магнитного поля не зависит от режима работы асинхронной машины и ее нагрузки.
При анализе работы асинхронной машины часто используют понятие о скорости вращения магнитного поля ω 0, которая определяется соотношением:
ω 0 = (2 π f) / p = π n0 / 30 [рад/с] 14. 4
14. 5. Режимы работы трехфазной асинхронной машины
Асинхронная машина может работать в режимах двигателя, генератора и электромагнитного тормоза.
14. 6. Режим двигателя
Этот режим служит для преобразования потребляемой из сети электрической энергии в механическую.
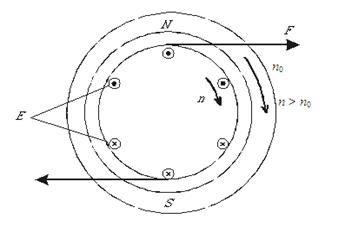
Рис. 14. 10
Пусть обмотка статора создаёт магнитное поле, вращающееся с частотой n0 в указанном направлении (рис. 14. 10). Это поле будет наводить согласно закону электромагнитной индукции в обмотке ротора ЭДС. Направление ЭДС определяется по правилу правой руки и показано на рисунке (силовые линии должны входить в ладонь, а большой палец нужно направить по направлению движения проводника, т. е. ротора, относительно магнитного поля). В обмотке ротора появится ток, направление которого примем совпадающим с направлением ЭДС. В результате взаимодействия обмотки ротора с током и вращающегося магнитного поля возникает электромагнитная сила F. Направление силы определяется по правилу левой руки (силовые линии должны входить в ладонь, четыре пальца – по направлению тока в обмотке ротора). В данном режиме (рис. 14. 10) электромагнитная сила создаст вращающий момент, под действием которого ротор начнет вращаться с частотой n. Направление вращения ротора совпадает с направлением вращения магнитного поля. Чтобы изменить направление вращения ротора (реверсировать двигатель), нужно изменить направление вращения магнитного поля. Для реверса двигателя нужно изменить порядок чередования фаз подведенного напряжения, т. е. переключить две фазы.
|
|
|
При номинальном режиме работы двигателя скольжение равно:
Sn = (2 ÷ 5) %. 14. 5
В режиме холостого хода асинхронного двигателя:
Sхх = (0, 2 ÷ 0, 7) %. 14. 6
|
|
|
