 |


14.7. Режим генератора. 14.8. Режим электромагнитного тормоза. 14.9. Механическая характеристика асинхронного двигателя
|
|
|
|
14. 7. Режим генератора
Этот режим служит для преобразования механической энергии в электрическую, т. е. асинхронная машина должна развивать на валу тормозной момент и отдавать в сеть электрическую энергию. Асинхронная машина переходит в режим генератора, если ротор начинает вращаться быстрее магнитного поля (n > n0). Этот режим может наступить, например, при регулировании частоты вращения ротора.
Пусть n > n0. При этом изменится (по сравнению с режимом двигателя) направление ЭДС и тока ротора, а также изменится направление электромагнитной силы и электромагнитного момента (рис. 14. 11). Машина начинает развивать на валу тормозной момент (потребляет механическую энергию) и возвращает в сеть электрическую энергию (изменилось направление тока ротора, т. е. направление передачи электрической энергии).

Рис. 14. 11
При n > n0 S = 0. При n → +∞ S → – ∞.
Таким образом, в режиме генератора скольжение изменяется в пределах:
0 > S > – ∞.
14. 8. Режим электромагнитного тормоза
Этот режим работы наступает, если ротор и магнитное поле вращаются в разные стороны. Этот режим работы имеет место при реверсе асинхронного двигателя, когда изменяют порядок чередования фаз, т. е. изменяется направление вращения магнитного поля, а ротор по инерции вращается в прежнем направлении.
Согласно рис. 14. 12 электромагнитная сила будет создавать тормозной электромагнитный момент, под действием которого будет снижаться частота вращения ротора, а затем произойдет реверс.
В режиме электромагнитного тормоза машина потребляет механическую энергию, развивая на валу тормозной момент, и одновременно потребляет из сети электрическую энергию. Вся эта энергия идёт на нагрев машины.
|
|
|
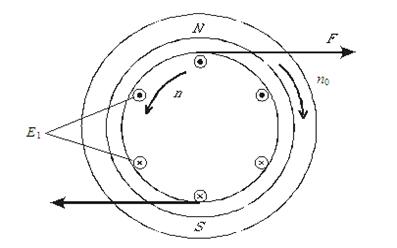
Рис. 14. 12
При n = n0, S = 1. При n → – ∞, S → + ∞.
Таким образом, в режиме электромагнитного тормоза скольжение изменяется в пределах:
0 < S < ∞.
14. 9. Механическая характеристика асинхронного двигателя
Под механической характеристикой принято понимать зависимость частоты вращения ротора в функции от электромагнитного момента n = f(M). Эту характеристику (рис. 14. 13) можно получить, используя зависимость M = f(S) и пересчитав частоту вращения ротора при разных значениях скольжения.
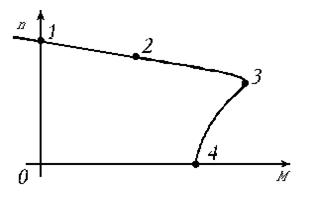
Рис. 14. 13
Так как S = (n0 – n) / n0, отсюда n = n0(1 – S). Напомним, что n0 = (60 f)/p – частота вращения магнитного поля.
Участок 1–3 соответствует устойчивой работе, участок 3–4 – неустойчивой. Точка 1 соответствует идеальному холостому ходу двигателя, когда n = n0. Точка 2 соответствует номинальному режиму работы двигателя, ее координаты Мн и nн. Точка 3 соответствует критическому моменту Мкр и критической частоте вращения nкр. Точка 4 соответствует пусковому моменту двигателя Мпуск. Механическую характеристику можно рассчитать и построить по паспортным данным. Точка 1: n0 = (60 f) / p, где р – число пар полюсов машины; f – частота сети.
Точка 2 с координатами nн и Мн. Номинальная частота вращения nн задается в паспорте. Номинальный момент рассчитывается по формуле:
 , 14. 7
, 14. 7
здесь Рн – номинальная мощность (мощность на валу).
Точка 3 с координатами Мкр nкр. Критический момент рассчитывается по формуле Мкр = Мн λ. Перегрузочная способность λ задается в паспорте двигателя nкр = n0 (1 – Sкр),  , Sн = (n0 – nн) / n0 – номинальное скольжение.
, Sн = (n0 – nн) / n0 – номинальное скольжение.
Точка 4 имеет координаты n = 0 и М = Мпуск. Пусковой момент вычисляют по формуле Мпуск = Мн λ пуск,
где λ пуск – кратность пускового момента задается в паспорте.
Асинхронные двигатели имеют жесткую механическую характеристику, так как частота вращения ротора (участок 1–3) мало зависит от нагрузки на валу. Это одно из достоинств этих двигателей.
|
|
|
|
|
|
