 |


Принципы построения систем управления положением. Системы управления положением исполнительного органа.
|
|
|
|
Системы регулирования положения имеют очень широкий диапазон назначения. Они применяются в различных промышленных установках и работах в качестве систем наведения антенн, оптических радиотелескопов. Множество исполнительных двигателей от единиц до сотен кВт, их питание осуществляется от электромашинных, тиристорных преобразователей, транзисторных усилителей мощности.
Контроль положения осуществляется с помощью датчиков, которые в аналоговой илидискретной форме дают информацию о перемещении рабочего органа на протяжении всего пути. Вкачестве датчиков используются сельсины, импульсные и цифровые датчики и др. В большинстве случаев мощные промышленные системы управления положением привода строятся по принципам подчиненного регулирования при питании ДПТ от ТП. На рис. 1.85 СУ положением в которой при переключении переключателя П осуществляется замыкание аналогового или цифрового контура.

Рис.1.85. Схема системыуправления положением.
 В первом случае измерительными элементами являются сельсины, работающие в трансформаторном режиме. Сельсин-приемник (СП) связан с исполнительным органом (ИО), который приводится от двигателя М через редуктор РД. Подача на вход управляющего воздействия, которым является поворот сельсина датчика (СД) на некоторый угол φу относительно СП, вызывает появление на его однофазной обмотке напряжения переменного тока Uссд, значение которого определяется значением угла рассогласования ¸ а фаза – направлением поворота (знаком угла). Фазочувствительным выпрямителем (ФЧВ) напряжение выпрямляется, полярность Uфчв определяется знаком рассогласования.
В первом случае измерительными элементами являются сельсины, работающие в трансформаторном режиме. Сельсин-приемник (СП) связан с исполнительным органом (ИО), который приводится от двигателя М через редуктор РД. Подача на вход управляющего воздействия, которым является поворот сельсина датчика (СД) на некоторый угол φу относительно СП, вызывает появление на его однофазной обмотке напряжения переменного тока Uссд, значение которого определяется значением угла рассогласования ¸ а фаза – направлением поворота (знаком угла). Фазочувствительным выпрямителем (ФЧВ) напряжение выпрямляется, полярность Uфчв определяется знаком рассогласования.
Напряжение, появляется на выходе РП, воздействуя на вход контура скорости, и двигатель вращается, отрабатывая рассогласования пока не установится равенство φ=φу.При ограничении входного напряжения РП значением U.огррп максимальная скорость двигателя не превышает номинального значения ωн.
|
|
|
В цифровом контуре положения измерительным элементом является дискретный датчик обратной связи (ДОС). С помощью схемы преобразования (СП) с него снимается сигнал в двоичном коде, благодаря чему датчик вместе со схемой преобразования представляет собой преобразователь «угол-код» (ПУК) или преобразователь «линейное перемещение-код».
Вычислительное устройство (ВУ), сравнивая полученные в цифровой форме предписанное значение и истинное значение, определяет код ошибки и вырабатывает в цифровой форме корректирующий сигнал, преобразуя результат вычислений в напряжение, действующее на вход контура скорости. Наиболее перспективное направление при создании цифровых систем управления положением – применение управляющих ЦВМ.
По принципу действия ЦВМ выполняет необходимые математические операции в течение определенного времени, называемого периодом дискретности. Если ЦВМ решает сложные задачи управления всем технологическим процессом и рассматриваемая система – одна из локальных систем, то период дискретности не будет сделан достаточно малым и использование ЦВМ в контуре регулирования нерационально. Тогда СУП выполняется как автономная, а ЦВМ вырабатывает предписанное значение перемещения в цифровом виде.
В цифровом контуре регулирования значения величины, полученной при математических действиях за период дискретности, остается неизменный и в последующий период дискретности. Происходит процесс квантования по времени (процесс превращения непрерывной функции времени в ступенчатую). Цифровое представление величин характеризуется тем, что возможна фиксация не любых значений величины, а ряда значений, отличающихся друг от друга на единицу младшего разряда. Так происходит квантование по уровню. Значит цифровой контур – нелинейная дискретная система.
|
|
|
В общем случае структуру цифровой системы регулирования положения (СРП) представляем в виде (рис.1.86.). Цифровые корректирующие устройства ЦКУ1 и ЦКУ2 обрабатывают информацию соответственно в ЦВМ и ВУ, реализуя принятые законы управления. Эффект квантования по времени учитывается введением импульсных элементов (ключи), с периодами дискретности Т1, Т2, Т3. Квантование по уровню осуществляется нелинейными элементами НЭ1, НЭ2, НЭ3, имеющими релейную характеристику с числом ступеней N=2α-1, где α – число используемых двоичных разрядов. Экстраполятор Э преобразует дискретный сигнал в непрерывный. Экстраполяция – (лат. выпрямляю, изменяю) отыскание значений функции в точках, лежащих вне интервала, содержащего известныезначения этой функции. Выходное напряжение экстраполятора воздействует на аналоговую неизменяемою часть контура положения с передаточной функцией.
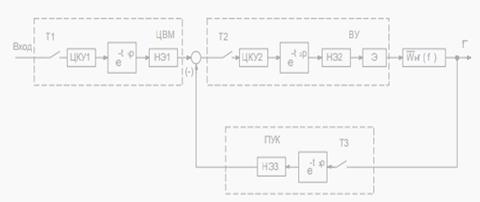
Рис.1.86. Структура цифровой системы регулирования положения.
|
|
|
