 |


Кинематика начального механизма
|
|
|
|
И.С. Березин
Построение плана скоростей механизма
Омск 2013
Министерство транспорта Российской Федерации
Федеральное агентство морского и речного транспорта
Омский институт водного транспорта (филиал)
Федерального бюджетного образовательного учреждения
Высшего профессионального образования
«Новосибирская государственная академия водного транспорта»
Кафедра специальных технических дисциплин
И.С. Березин
Построение планов скоростей механизма
Учебное пособие
Омск 2013
УДК 621.01
ББК 34.41
Б 48
Рецензент:
кандидат технических наук, доцент, профессор АВН Н.В.Закерничная
ННННН
Работа одобрена учебно-методическим советом филиала в качестве методического пособия и указаний к лабораторной работе по дисциплине «Теория механизмов и машин» для студентов, обучающихся по специальностям 180403 «Эксплуатация судовых энергетических установок», 180103 «Судовые энергетические установки» для всех форм обучения.
Березин И.С. Построение планов скоростей механизма [ Текст]: учебное пособие / И.С. Березин. – Омск: ОИВТ (филиал) ФБОУ ВПО «НГАВТ», 2013. – 36 с.
Разработано учебное пособие и приведены задания для проведения лабораторной работы по дисциплине «Теория механизмов и машин»в соответствии с рабочей программой.
© ОИВТ (филиал) ФБОУ ВПО
«НГАВТ», 2013
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ. 4
2 Теоретическая часть. 6
2.1 Планы скоростей. 6
2.1.1 Свойства планов скоростей. 6
2.2 Скорости основных звеньев, применяемых в кинематических парах 6
2.2.1 Кинематика начального механизма. 6
2.2.2 Кинематика ведомого звена. 7
|
|
|
2.2.3 Кинематика звена 3. 11
3 Графическое решение векторных уравнений.. 17
3.1 Планы скоростей шатуна шарнирного четырехзвенника. 17
3.2 Планы скоростей кулисного камня. 20
3.3 Планы скоростей камня синусного механизма. 23
3.4 Планы скоростей кривошипно-ползунного механизма. 24
4 Варианты схем механизмов для лабораторной работы 26
5.1 Объем работы.. 27
5.2 Оформление лабораторной работы.. 27
Библиографический список.. 30
ВВЕДЕНИЕ
C целью закрепления теоретического материала и приобретения навыков исследования типовых механизмов, применяемых на речном и морском транспорте, студенты выполняют ряд лабораторных работ, по теории механизмов и машин.
Работа «Построение планов скоростей механизма» является продолжением работы «Построение планов положений механизма» и посвящена кинематическому исследованию механизмов.
Варианты заданий определяются по двум последним цифрам шифра студента
ЦЕЛЬ РАБОТЫ
Цель работы: Научиться определять скорости звеньев и их точек у различных механизмов графическими методами.
При этом считаются известными законы движения начальных звеньев, размеры звеньев, построены планы для двенадцати положений механизма (построены кинематические схемы).
В результате лабораторной работы должны быть построены планы скоростей для двенадцати положений механизма и определены скорости всех точек механизма, указанных в задании.
Теоретическая часть
Планы скоростей
Основные понятия
Планом скоростей называют рисунок, на котором в масштабе изображены векторы, равные по модулю и направлению скоростям различных точек звеньев механизма в данный момент времени.
План скоростей, построенный для исследуемого положения механизма – это совокупность нескольких планов скоростей отдельных точек звеньев, у которых полюса планов являются общей точкой – полюсом плана скоростей механизма.
|
|
|
Планы скоростей механизма могут строиться как для каждого положения отдельно, так и быть совмещенными.
2.1.1 Свойства планов скоростей
а) Векторы абсолютных скоростей направлены из полюса.
б) Векторы, соединяющие концы векторов абсолютных скоростей, есть векторы относительных скоростей.
в) Точки, у которых скорости равны 0, расположены в полюсе.
г) Векторы относительных скоростей образуют на плане скоростей фигуру, подобную жесткому контуру на кинематической схеме механизма.
д) Планы скоростей позволяют определить величину и направление угловых скоростей звеньев.
2.2 Скорости основных звеньев, применяемых
в кинематических парах
Кинематика начального механизма
Начальный механизм состоит (рис.1) из начального звена 2 (кривошипа АВ) и стойки 1, связанных между собой шарниром А. Начальное звено вращается равномерно с угловой скоростью  . Точка В описывает окружность радиусом r2 = АВ. Линейная скорость точки В, т.е. νв, направлена по касательной к траектории (окружности) в точке В или перпендикулярно к АВ. Начальное звено совершает простое равномерное вращательное движение. При этом угловое ускорение звена равно 0, тангенциальное ускорение точки В
. Точка В описывает окружность радиусом r2 = АВ. Линейная скорость точки В, т.е. νв, направлена по касательной к траектории (окружности) в точке В или перпендикулярно к АВ. Начальное звено совершает простое равномерное вращательное движение. При этом угловое ускорение звена равно 0, тангенциальное ускорение точки В  , а нормальное ускорение
, а нормальное ускорение
 ,
,
где  – угловая скорость звена АВ, рад/с;
– угловая скорость звена АВ, рад/с;  – нормальное ускорение точки В,
– нормальное ускорение точки В,  , которое при отсутствии тангенциального ускорения равно полному ускорению точки В, т.е.
, которое при отсутствии тангенциального ускорения равно полному ускорению точки В, т.е.  ; νв– скорость точки В, м/с; r2 – радиус траектории точки В, м.
; νв– скорость точки В, м/с; r2 – радиус траектории точки В, м.
Скорость точки В определяется по формуле

где = π  /30 – угловая скорость начального звена, рад/с; п2 – частота вращения начального звена, мин-1.
/30 – угловая скорость начального звена, рад/с; п2 – частота вращения начального звена, мин-1.
Скорость точки В направлена в ту сторону, куда вращается начальное звено.

Рисунок 1
На рис.1 угловая скорость направлена по часовой стрелке.
Угловая скорость начального звена задана в исходных данных.
Кинематика ведомого звена
Разберем кинематику 4-х видов ведомых звеньев: коромысла, ползуна, кулисы и ползуна с кулисой. Скорость и ускорение ведомого звена неизвестны и их требуется определить.
а) Определение скоростей коромысла
Коромысло 4 совершает возвратно-вращательное движение (как маятник) вокруг точки Д. В данный рассматриваемый момент его угловая скорость  направлена по часовой стрелке, скорость точки С – по касательной к траектории точки С (окружности) и связана с угловой скоростью уравнением
направлена по часовой стрелке, скорость точки С – по касательной к траектории точки С (окружности) и связана с угловой скоростью уравнением
|
|
|
 ,
,
где  – длина звена 4 (СD)
– длина звена 4 (СD)

Рисунок 2
б) Определение скоростей ползуна.
Ползун 4 совершает возвратно-поступательное движение вдоль направляющей x - х. В данный рассматриваемый момент его скорость  направлена слева направо (рис. 3). Ползун движется неравномерно Модули (численные величины) скорости неизвестны, их можно определить из анализа движения шатуна.
направлена слева направо (рис. 3). Ползун движется неравномерно Модули (численные величины) скорости неизвестны, их можно определить из анализа движения шатуна.

Рисунок 3
в) Определение скоростей кулисы
Кулиса 4 совершает возвратно-вращательное движение вокруг точки С, как маятник или коромысло (рис. 4).
В данный рассматриваемый момент ее угловая скорость направлена по часовой стрелке, а угловое ускорение  - против часовой стрелки. Это означает, что движение в данный момент замедленное.
- против часовой стрелки. Это означает, что движение в данный момент замедленное.

Рисунок 4
По направляющей (см. рис. 4) кулисы х - х движется кулисный камень 3. У кулисного камня имеется шарнир В, через который он связан с кривошипом. Если на оси направляющей кулисы х - х под шарниром взять точку, которая принадлежит кулисе, то это будет точка В 4. Точка В4 условная, т.к. она расположена на оси кулисы, а сверху закрыта точкой В. Индекс 4 говорит о принадлежности точки В4 к звену 4, т.е. кулисе. Точка В4 является своего рода тенью точки В, поэтому точку В4 всегда определяет точка В.
Так как точка В4 принадлежит кулисе, ее скорость  связана с угловой скоростью кулисы уравнением
связана с угловой скоростью кулисы уравнением
 ,
,
где – расстояние точки  от шарнира С.
от шарнира С.
г) Определение скоростей ползуна синусного механизма
Ползун 4 с кулисой К совершает возвратно-поступательное движение вдоль направляющей у - у. В данный рассматриваемый момент его скорость  направлена слева направо (рис.5). Ползун движется неравномерно. Его ускорение а4 направлено в данный момент справа налево. Это означает, что движение замедленное. По направляющей кулисых – х движется кулисный камень 3 с шарниром В.
направлена слева направо (рис.5). Ползун движется неравномерно. Его ускорение а4 направлено в данный момент справа налево. Это означает, что движение замедленное. По направляющей кулисых – х движется кулисный камень 3 с шарниром В.
|
|
|

Рисунок 5
Под шарниром В на оси кулисы располагается точка В4, которая является как бы тенью точки В. Так как точка В4 принадлежит кулисе К с ползуном 4, её скорость

Численные значения (модули) скорости неизвестны, их можно определить из анализа движения кулисного камня.
2.2.3 Кинематика звена 3

Рисунок 6
Разберем кинематику шатуна и кулисного камня. Эти звенья под номером 3 подсоединяются к механизму двумя подвижными кинематическими парами. Как правило, известны скорость и ускорение шарнира В. Движение точки В принимается как переносное, а точка В рассматривается как полюс. Другая точка звена 3 совершает относительное движение: вращательное или поступательное.
О скорости и ускорении переносного движения известны модуль и направление. О скорости и ускорении относительного движения известно только направление. О скорости и ускорении результирующего движения звена известно тоже только направление.
Звено 3 (шатун или кулисный камень) совершает плоскопараллельное движение, состоящее из поступательного и вращательного движений. Кинематическое исследование механизмов можно выполнять с помощью аналитических или графических методов. Аналитические методы точнее, но графические методы более наглядны и годятся для исследования механизмов любой структуры. Ниже приведены графические методы анализа.
Для применения графических методов нужно научиться составлять векторные уравнения.
Звенья рычажных механизмов совершают три вида движений. Ранее было рассмотрено простое вращательное движение кривошипа, коромысла и кулисы. У этих звеньев один шарнир связан с неподвижной стойкой и его скорость равна нулю. Рассмотрено также поступательное движение ползуна, который движется в неподвижных направляющих.
Проанализируем сложное плоскопараллельное движение шатуна и кулисного камня с целью научиться составлять векторные уравнения скоростей звеньев, а затем решать их графическим методом.
а) Определение скоростей шатуна
 Два шарнира (точки В и С) принадлежат одному звену 3 (шатуну), а расстояние между ними равно l3. Пусть звено 3 совершает плоскопараллельное движение: движется прямолинейно со скоростью vB и вращается вокруг точки В (полюса) с угловой скоростью ῳ3 . Определим скорость точки С.
Два шарнира (точки В и С) принадлежат одному звену 3 (шатуну), а расстояние между ними равно l3. Пусть звено 3 совершает плоскопараллельное движение: движется прямолинейно со скоростью vB и вращается вокруг точки В (полюса) с угловой скоростью ῳ3 . Определим скорость точки С.
Из теоретической механики известно, что скорость любой точки твердого тела, совершающего сложное движение, есть геометрическая сумма скоростей переносного и относительного движений.
Переносным называется поступательное движение всего тела (звена) в одном направлении со скоростью vs (рис.6). Относительным движением называется вращение тела (звена) вокруг полюса В с угловой скоростью  . Относительная скорость vCB точки С относительно полюса В будет равна
. Относительная скорость vCB точки С относительно полюса В будет равна
|
|
|

Формула показывает, что скорость vвс. зависит от расстояния какой-либо точки звена 3 до полюса, т.е.
 ,
,
где νi – относительная скорость i -й точки звена 3;  – расстояние i -й точки от полюса В. Кроме этого, формула показывает, что зависимость линейная, поэтому относительные скорости точек звена 3 с приближением к полюсу В, убывают линейно, а в точке В относительная скорость равна нулю.
– расстояние i -й точки от полюса В. Кроме этого, формула показывает, что зависимость линейная, поэтому относительные скорости точек звена 3 с приближением к полюсу В, убывают линейно, а в точке В относительная скорость равна нулю.
Точка В (полюс) совершает только поступательное движение со скоростью νв. Точка С, как и все тело, движется поступательно со скоростью νв и, кроме того, вращается вокруг полюса В со скоростью νсв. Абсолютная скорость точки С есть геометрическая сумма двух скоростей. Векторное уравнение этой суммы имеет вид

В уравнении скорости νв и νсв принадлежит точке С, поэтому их можно складывать геометрически.
При вращении звена 3 вокруг полюса В точка С движется по дуге окружности в одну сторону с угловой скоростью ω3, скорость νсв направлена по касательной к дуге в-в, т.е. перпендикулярно к звену ВС. В общем случае νв и ω3 – переменные величины как по модулю, так и по направлению. Нужно твердо помнить, что кинематический анализ производится для данного положения механизма, для данного мгновения, поэтому сложное движение звена мы рассматриваем для данного мгновения времени, а скорости и ускорения имеют мгновенные значения. В следующее мгновение скорости и ускорения принимают другие значения.
б) Определение скоростей кулисного камня
Кулисный камень это ползун 3, который движется по направляющей кулисы 4 (рис. 7).
Направляющая х - х (рис. 7), которая проходит сквозь отверстие в камне 3, называется охватываемой. Направляющая х - х выполненная в виде рамки, внутри которой движется камень, называется охватывающей. Охватывающая и охватываемая направляющие выполняют одну и ту же функцию оставляют камню одну единственную свободу движения вдоль направляющей х-х.
Кулисный камень это звено, которое (рис. 7) имеет одну вращательную пару (шарнир В), посредством которой камень присоединяется к кривошипу 2, и одну поступательную пару (направляющую х - х), посредством которой камень подсоединяется к кулисе 4. В этом случае две точки В и В4 принадлежат двум звеньям 3 и 4.
Итак, по направляющей х - х кулисы 4 (рис.7, а) движется кулисный камень 3. Если на оси направляющей х – х кулисы под шарниром В взять точку, которая принадлежит кулисе, то это будет точка В4 (левая проекция рис. 7 а). Точка В4 - условная, т.к. она расположена (правая проекция рис. 7, а и 7, б) на оси кулисы 4, а сверху закрыта точкой В.

Рисунок 7
Индекс 4 говорит о том, что точка В4 принадлежит звену 4. Точка В4 является своего рода тенью точки В, поэтому точку В4 всегда определяет точка В.
Движение камня 3 вдоль направляющей х-х кулисы рассматривают как движение точки В относительно В4. Движение это, как правило, относительное. Кулиса 4 может совершать вращательное движение (рис.7 а) вокруг точки С с угловой скоростью ω4 или двигаться прямолинейно (рис. 7, б) вдоль направляющей у-у со скоростью  . В первом случае абсолютная скорость точки В4 определится по формуле
. В первом случае абсолютная скорость точки В4 определится по формуле
 ,
,
а во втором случае  , т.е. скорость точки В4 будет равна скорости кулисы. Кулиса, движущаяся прямолинейно (рис.7, б), является частным случаем качающейся кулисы (рис. 7, а), когда радиус
, т.е. скорость точки В4 будет равна скорости кулисы. Кулиса, движущаяся прямолинейно (рис.7, б), является частным случаем качающейся кулисы (рис. 7, а), когда радиус  . Поэтому ниже рассмотрим случай, соответствующий рис. 7, а.
. Поэтому ниже рассмотрим случай, соответствующий рис. 7, а.
Пусть кулисный камень (звено 3) совершает плоскопараллельное движение. Его точка В движется со скоростью νв, которая определяется угловой скоростью кривошипа 2
 .
.
Требуется определить скорость точки В4 (рис.8). Абсолютная скорость точки В4 равна геометрической сумме скорости переносного движения νв и скорости относительного движения νв4в – это относительная скорость кулисы 4 относительно камня 3, которая направлена вдоль оси кулисы х-х.
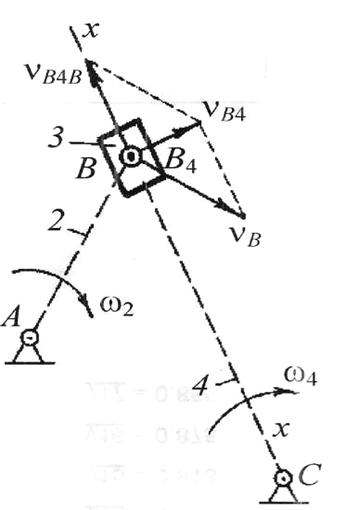
Рисунок 8
Поступательная пара, в которую входят звенья 3 и 4, прочно связывает эти звенья, оставляя им лишь одну степень свободы относительного движения вдоль направляющей х-х. Скорость νв, которая направлена под углом к направляющей х-х и приложена к звену 3, передается и звену 4. Поэтому скорость νв является переносной скоростью не только для точки В, но и для точки В4.
Учитывая вышесказанное, можно записать векторное уравнение геометрической суммы скоростей
 ,
,
где vB4 – абсолютная скорость точки В4. С этой скоростью она вращается вокруг точки С, а её величина определяется по формуле
Отсюда определяется угловая скорость звена 4.
|
|
|
