 |


Построение экспериментальной переходной функции объекта
|
|
|
|
Управления
Проведение эксперимента начинают с установки на объекте управления выбранного режима работы, который характеризуется постоянством выходной переменной и всех влияющих на нее переменных. Установившийся режим работы при заранее выбранном значении выходной переменной  выдерживают 2,0—2,5 мин для медленно протекающих процессов, связанных, например, с изменением температуры или влажности, и 0,3—0,5 мин — для более быстро протекающих процессов, таких, например, как изменение давления или расхода.
выдерживают 2,0—2,5 мин для медленно протекающих процессов, связанных, например, с изменением температуры или влажности, и 0,3—0,5 мин — для более быстро протекающих процессов, таких, например, как изменение давления или расхода.
Затем скачком вводят испытательное воздействие и одновременно начинают регистрировать изменение выходной переменной во времени. Для дальнейшей оценки вида испытательного воздействия необходимо также определить время его внесения. Помимо регистрации выходной переменной в процессе эксперимента желательно, если это возможно, записывать изменения основных возмущающих переменных и, в первую очередь, нагрузки объекта.
Окончание переходного процесса определяется по значению выходной переменной. При экспериментальном определении переходной функции на объектах с самовыравниванием (ρ >0) опыт считается законченным, если выходная переменная, начиная с некоторого момента времени, остается практически неизменной, а на объектах без самовыравнивания (ρ = 0)—если скорость изменения переменной достигает своего постоянного максимального значения.
Результаты эксперимента удобно представить в виде таблицы 6.1.
Таблица 6.1 – Экспериментальные данные для построения переходного
процесса
| № п/п | время | Значение входного параметра | Значение выходного параметра |
| t0 | x(t0) | h(t0) | |
| t1 | x(t1) | h(t1) | |
| t2 | x(t2) | h(t2) | |
| … | … | … | … |
| n | tn | x(tn) | h(tn) |
Рассмотрим синтез автоматической системы регулирования технологическим параметром на конкретном примере.
|
|
|
Пример. Экспериментальным путем на реально действующем объекте управления по нормализации молока построить графики переходного процесса.
Для этого на вход подается ступенчатое воздействие x(t) – расход молока от 1,2 до 1,6 кг/м3. Отслеживаются и записываются в таблицу 6.2 значения выходной величины.
Таблица 6.2 – Экспериментальные данные для построения переходной
функции ОУ
| t, сек. | |||||||||||
| x(t), м3/ч | 1,2 | 1,59 | 1,6 | 1,6 | 1,6 | 1,6 | 1,6 | 1,6 | 1,6 | 1,6 | 1,6 |
| y(t), м | 2,04 | 2,09 | 2,13 | 2,15 | 2,17 | 2,18 | 2,19 | 2,2 | 2,2 |
На рисунке6.1 представлен график скачкообразного воздействия на объект управления. Для построения графика использована программа MathCad.
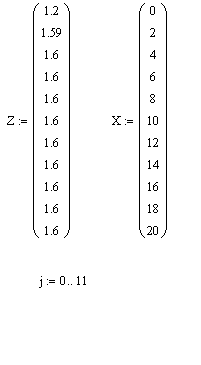
Zj – изменение входной величины,
Xj – время
Рисунок 6.2 – График скачкообразного изменения входного воздействия
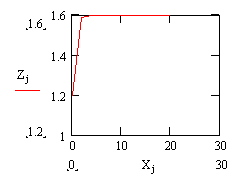
По данным таблицы 6.2 строится экспериментальная переходная функция объекта управления y(t) в программе MathCad.
Yj- изменение выходной величины, м; Xj- время, сек.
Рисунок 6.3 – Переходная функция объекта управления y(t),
Определение параметров передаточной функции объекта
Управления
Определение динамических параметров объекта по его экспериментально снятой переходной функции производят графическими или графоаналитическими методами.
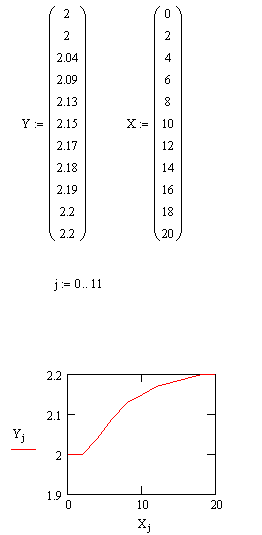
В таблицах 6.3 и 6.4 приведены наиболее распространенные методы определения динамических параметров объекта и показаны графические построения, выполняемые при их использовании.
Таблица 6.3 - Определение динамических параметров объекта с самовыравниванием по экспериментальной переходной функции
Таблица 6.4- Определение динамических параметров объекта без самовыравнивания по экспериментальной переходной функции
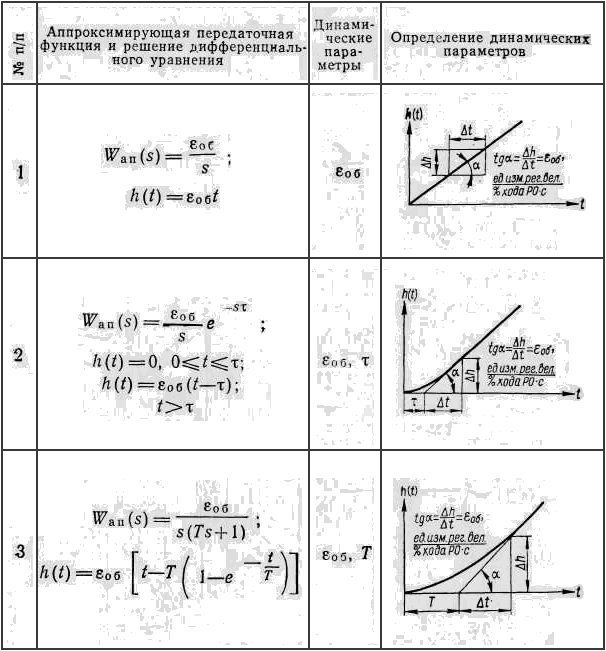
При определении динамических параметров объекта с самовыравниванием вначале проводят линию нового установившегося значения h (∞), которого переходная функция должна достигнуть за бесконечное время. Её проводят на расстоянии примерно0,05[ h (∞)— h (0)]от последних опытных значений переходной функции. Значение коэффициента передачи объекта определяют как разность установившихся нового и начального значений переходной функции:
|
|
|
 (1)
(1)
Для определения временных постоянных проводят касательную в точке переходной функции, в которой скорость изменения  имеет максимальное значение, т. е. из всех возможных касательных, которые можно провести к переходной функции, эта касательная должна иметь наибольший угол наклона.Проекция отрезка касательной, заключенного между прямыми h (0) и h (∞), на ось времени равна постоянной времени T.
имеет максимальное значение, т. е. из всех возможных касательных, которые можно провести к переходной функции, эта касательная должна иметь наибольший угол наклона.Проекция отрезка касательной, заключенного между прямыми h (0) и h (∞), на ось времени равна постоянной времени T.
Пример: Вид полученной выше экспериментальной переходной функции позволяет сделать вывод, что с достаточной для практических задач точностью данный объект можно аппроксимировать последовательным соединением следующих типовых динамических звеньев: звеном чистого запаздывания и апериодическим звеном первого порядка. Таким образом, выражение для передаточной функции объекта управления будет иметь вид:
 , (2)
, (2)
где К=0,23;
T=9;
τ=2.
|
|
|
