 |


Построение переходной функции замкнутой САР с ПИ-
|
|
|
|
Регулятором по ее передаточной функции
Для построения в Math Cad переходной функции объекта управления с целью определения показателей качества необходимо записать передаточную функцию замкнутой САР. В общем виде эта функция будет выглядеть следующим образом:
 (17)
(17)
При нахождении переходной функции замкнутой системы в Math Cad следует учитывать, что в знаменателе передаточной функции  требует разложения в ряд Тейлора. Формула имеет вид:
требует разложения в ряд Тейлора. Формула имеет вид:
 . (18)
. (18)
Пример:
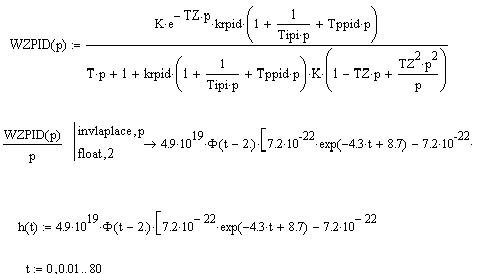
Передаточная функция замкнутой САР уровня с ПИ- регулятором:

Текст программы в Math Cad:

График переходной функции замкнутой АСР уровня с ПИ- регулятором показан на рисунке 12.

h(t) – уровень, м; t – время, сек.
Рисунок 12 – Переходная функция замкнутой системы автоматического регулирования уровня с ПИ – регулятором.
Расчет показателей качества управления замкнутой САР с ПИ- регулятором
Как видно из графика, в замкнутой системе с ПИ- регулятором время регулирования составляет 30 секунд. Перерегулирование практически отсутствует.
Построение переходной функции замкнутой САР с ПИ- регулятором по ее передаточной функции
Пример: По аналогии построим переходную функцию замкнутой системы автоматического регулирования с ПИД- регулятором.

Построим график переходной функции в программе MathCad:
На рисунке 12 представлена переходная функция замкнутой САР с ПИ-регулятором.

h(t) – уровень, м; t – время, сек.
Рисунок 12 – Переходная функция замкнутой системы автоматического регулирования уровня с ПИ – регулятором.
Расчет показателей качества управления замкнутой САР с ПИД- регулятором
Как видно из графика переходного процесса замкнутой системы с ПИД- регулятором, перерегулирования в системе отсутствует, время регулирования составляет 20 секунд.
|
|
|
Выводы по разделу 3
Для анализа качества переходных процессов в системах автоматического регулирования с ПИ- и ПИД- регуляторами представим показатели этих процессов в виде таблицы. В рассматриваемом примере и ПИ-, и ПИД- регулятор позволяют обеспечить требуемое качество регулирования. Тем не менее, ПИД- регулятор обеспечит лучшее качество регулирования.
Заключение
Приведенные выше графики и расчеты позволяют сделать обоснованный выбор регулятора. Если выбор сделан правильно, это позволит обеспечить поддержание регулируемого параметра в заданном диапазоне, следовательно, повысить качество регулирования и минимизировать потери сырья и энергии.
Для рассмотренного объекта управления выбран ПИД – регулятор.
Приложение А
Министерство образования и науки Российской федерации
Федеральное государственное бюджетное образовательное учреждение высшего образования
Московский государственный университет технологий и управления
им К.Г. Разумовского (Первый казачий университет)
Филиал ФГБОУ ВО «МГУТУ им. К.Г. Разумовского (ПКУ)» в г. Мелеузе
Курсовая работа
по дисциплине:
«Автоматизированные системы управления»
на тему:
«АСУТП осушки природного газа»
Студента 4 курса
Института СА и И
Направления подготовки
Группа 1
Шифр 0426-220700-11/022
Петухова И.В.
Преподаватель:
К.т.н., доцент Шиянова Н.И.
Курсовая работа защищена
с оценкой _____________
«_____» ___________2015 г.
Мелеуз 2015
Приложение Б
Министерство образования и науки Российской федерации
Федеральное государственное бюджетное образовательное учреждение высшего образования
Московский государственный университет технологий и управления
|
|
|
им К.Г. Разумовского (Первый казачий университет)
Филиал ФГБОУ ВО «МГУТУ им. К.Г. Разумовского (ПКУ)» в г. Мелеузе
Кафедра «Системы управления»
Техническое задание
на курсовую работу по дисциплине
«Автоматизированные системы управления»
Бакалавру _________________________________________________________
Ф.И.О. бакакалавра
Направление подготовки 220700.62 Курс 4 Группа ____________
Тема курсовой работы:
Задание на специальную часть:
Введение
1 Анализ существующей системы управления
1.1 Анализ технологического процесса
1.2 Анализ функциональной схемы
1.3 Постановка задачи
2 Синтез автоматизированной системы управления
2.1 Структурная схема автоматизированной системы управления
2.2 Выбор датчиков
2.3 Выбор исполнительных устройств
2.4 Выбор контроллера
2.5 Выбор SCADA - системы
a. Выбор АРМ оператора
3 Синтез одноконтурной АСР технологического параметра
3.1 Описание объекта управления (ОУ)
3.2 Идентификация переходной функции ОУ
3.3 Выбор закона регулирования и типа регулятора
3.4 Синтез замкнутой САР
3.5 Анализ устойчивости САР
3.6 Определение показателей качества управления замкнутой САР
Заключение
Список использованных источников
Руководитель ________________________(Н.И. Шиянова)
Дата выдачи задания: ______________________
Задание получил: _________________________
Приложение В
|
|
|
