 |


Тема 1 . Задачи математического программирования
|
|
|
|
Методы и модели анализа динамики экономических процессов
А информатики и компьютерных технологий
ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ.
ОПТИМАЛЬНОЕ РАСПРЕДЕЛЕНИЕ РЕСУРСОВ
Методические указания к лабораторным работам
для студентов направлений подготовки бакалавриата
120700, 080100, 080200
САНКТ-ПЕТЕРБУРГ
Министерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
Национальный минерально-сырьевой университет «Горный»
Кафедра информатики и компьютерных технологий
ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ.
ОПТИМАЛЬНОЕ РАСПРЕДЕЛЕНИЕ РЕСУРСОВ
Методические указания к лабораторным работам
для студентов направлений подготовки бакалавриата
120700, 080100, 080200
САНКТ-ПЕТЕРБУРГ
УДК 519.86:622.3.012 (075.83)
Линейное программирование. Оптимальное распределение ресурсов. Методические указания для выполнения лабораторных работ для студентов направлений подготовки бакалавриата 120700, 080100 и 080200./НМСУ «Горный». Сост. В.В. Беляев, Т.Р. Косовцева. СПб, 2013., 62 с.
Методические указания содержат необходимые теоретические сведения по решению задач линейного программирования аналитическими (симплекс-метод) и численными методами. Приведены примеры решения типовых задач по определению и анализу оптимального плана выпуска продукции предприятия.
Предназначены для студентов направлений подготовки бакалавриата 120700 «Землеустройство и кадастры», 080100 «Экономика», 080200 «Менеджмент»» дневной и заочной формы обучения,, изучающих дисциплины «Экономико-математические методы и моделирование», «Методы оптимальных решений», «Методы принятия управленческих решений».
|
|
|
Табл. 13. Рис.32. Библиогр.: 2 назв.
Научный редактор - доц. Прудинский Г.А.
© Национальный минерально-сырьевой университет «Горный», 2013 г.
Введение
Любой человек в течение всей своей жизни вынужден принимать решение, как в житейских, так и в производственных ситуациях. Как правило, существует множество вариантов решения одной и той же проблемы. Среди этого множества желательно найти наилучший в некотором смысле вариант с учетом ограничений, наличие которых обусловлено лимитированостью природных, экономических и технологических ресурсов. Математические методы, позволяющие применять для анализа и синтеза экономических ситуаций и систем современную вычислительную технику, объединяются под общим названием — математическое программирование.
Математическое программирование — область математики, разрабатывающая теорию и численные методы решения многомерных экстремальных задач с ограничениями, т. е. задач на экстремум функции многих переменных с ограничениями на область изменения этих переменных.
Функцию, которая отражает качество принимаемого решения, называют целевой или показателем эффективности или критерием оптимальности. Экономические возможности формализуются в виде системы ограничений. Ограничения, как правило, задаются в виде системы уравнений и неравенств.
Один из разделов математического программирования называется линейным программированием. К задачам линейного программирования относятся задачи, в которых целевая функция и ограничения выражаются линейными соотношениями. Методы и модели линейного программирования широко применяются при оптимизации процессов во множестве отраслей народного хозяйства. Особенно широкое применение методы и модели линейного программирования получили при решении задач экономии ресурсов (выбор ресурсосберегающих технологий, составление смесей, раскрой материалов), производственно-транспортных и других задач.
|
|
|
Эффективным методом решения данного класса задач является симплекс-метод.
ЛАБОРАТОРНАЯ РАБОТА 1
Тема 1. ЗАДАЧИ МАТЕМАТИЧЕСКОГО ПРОГРАММИРОВАНИЯ
Цель работы:
· изучить основные понятия линейного программирования;
· освоить графический метод решения простейших задач линейного программирования;
· научиться использовать симплексный метод с искусственным базисом на примере задачи о диете.
1. Основная задача линейного программирования
1.1. Основные формулы и определения
В каноническом виде задача линейного программирования (ЛП) формулируется следующим образом.
Найти такой набор  , который является решением системы
, который является решением системы

| (1.1) |
удовлетворяет соотношению

| (1.2) |
и обеспечивает максимум (минимум) линейной функции

| (1.3) |
Соотношения (1.1) принято называть фазовыми ограничениями, соотношения (1.2) – естественными ограничениями.
Функцию F принято называть целевой функцией.
Система ограничений всегда может быть приведена к каноническому виду.
Если ограничения заданы неравенствами, то их можно преобразовать в равенства путем введения новых неотрицательных переменных, так называемых балансовых (выравнивающих) ресурсов.
Так, например, в неравенстве  достаточно добавить к левой части некоторую величину xn+1³0 и получится равенство:
достаточно добавить к левой части некоторую величину xn+1³0 и получится равенство:  .
.
Чтобы балансовые переменные не влияли на искомый оптимум, их вводят в целевую функцию (1.1) с нулевыми коэффициентами.
В дальнейшем будет рассматриваться только задача на максимизацию. Если необходимо решить задачу на минимизацию линейной формы, то коэффициенты целевой функции следует умножить на (-1) и решать эту новую задачу на максимум. Искомый минимум целевой функции получается умножением найденного максимального значения на (-1), т.е.  .
.
Задачу ЛП, определяемую соотношениями (1.1)-(1.3), можно записать в матричном виде:
 ,
,
 ,
,
 ,
,
где  ,
,  ,
,  ,
,
 .
.
В дальнейшем при анализе задачи также используется расширенная матрица системы (1.1)  , которая составляется из матрицы А и вектора В.
, которая составляется из матрицы А и вектора В.

Пример 1. Задача о диете.
|
|
|
Составить задачу ЛП, позволяющую оптимизировать расход кормов, и привести ее к каноническому виду.
Для откорма животных употребляют два вида кормов; стоимость 1 кг корма I вида - 5 у.е., а корма - II вида 2 у.е. В каждом килограмме корма I вида содержится 5 ед. питательного вещества А, 2.5 ед. питательного вещества B и 1 ед. питательного вещества C. В каждом килограмме корма II вида содержится соответственно 3, 3 и 1.3 ед. Суточный рацион предусматривает питательных единиц A не менее 225 ед., типа B - не менее 150 ед. и типа C - не менее 80 ед. Какое количество корма каждого вида необходимо расходовать ежедневно, чтобы затраты были минимальны?
Решение
Построим математическую модель данной задачи. Обозначим через x 1 и x 2 количество кормов I и II вида соответственно. Тогда суммарная стоимость кормов будет равна 5 x 1 +2 x 2. Поэтому целевая функция будет иметь вид:

| (1.4) |
Ограничения по содержанию питательных веществ в рационе будут иметь вид:
| (1.5) |

| (1.6) |
Соотношения (1.4)-(1.6) корректно определяют задачу ЛП, но предложенная форма записи не является канонической. Для приведения задачи к этой форме домножим ЦФ (1.4) на –1, в результате получим новую ЦФ (1.7). Для преобразования фазовых ограничений (1.5) к канонической форме введем положительные балансовые переменные x 3, x 4 и x 5. Тогда фазовые ограничения примут вид (1.8), а естественные - вид (1.9).

| (1.7) |

| (1.8) |

| (1.9) |
Соотношения (1.7) – (1.9) определяют задачу ЛП в канонической форме.
1.2. Симплекс-метод
1.2.1. Геометрическая интерпретация
Геометрическое истолкование симплекс-метода наиболее просто может быть проиллюстрировано в случае двух переменных.
Положение 1.
Каждое неравенство  с двумя переменными x 1 и x 2 определяет полуплоскость в системе координат x 1 0 x 2.
с двумя переменными x 1 и x 2 определяет полуплоскость в системе координат x 1 0 x 2.
Положение 2.
В случае, когда задана система неравенств
| (1.10) |
то она определяет многоугольную область D на плоскости, которая является результатом пересечения m полуплоскостей. Область D называется областью решений системы неравенств. Область D может быть ограниченной, неограниченной или пустой. Область решений D обладает важным свойством – она является выпуклой.
|
|
|
Определение 1. Область называется выпуклой, если она вместе с любыми двумя точками содержит весь отрезок их соединяющий.
Определение 2. Прямая называется опорной по отношению к области, если:
1) имеет с областью по крайней мере одну общую точку;
2) вся область лежит по одну сторону от этой прямой.
Положение 3. Пусть задана линейная функция

| (1.11) |
Для каждой точки плоскости в системе координат x 1 0 x 2. функция F принимает фиксированное значение F=F 1.
Определение 3. Множество точек, в которых функция двух переменных принимает фиксированное значение, называется линией уровня.
Линия уровня для линейной функции – прямая, которая определяется уравнением  . Придавая F 1 различные значения, получим различные линии уровня.
. Придавая F 1 различные значения, получим различные линии уровня.
Все линии уровня (для линейной функции) параллельны между собой.
Нормаль к линии уровня определяется через градиент функции. Градиент произвольной функции двух переменных f (x 1, x 2) может быть вычислен по формуле
 , ,
| (1.12) |
поэтому градиент линейной функции определяется уравнением  , т.е. градиент может быть задан вектором
, т.е. градиент может быть задан вектором  , выходящим из начала координат.
, выходящим из начала координат.
Градиент указывает направление наибыстрейшего роста функции в данной точке.
Положение 4. Графическое решение задачи ЛП, определяемой фазовыми ограничениями (1.10), естественными ограничениями и целевой функцией (1.11), основано на мысленном эксперименте по перемещению линии уровня относительно области допустимых решений D. Область допустимых решений D задачи ЛП – это множество точек, координаты которых удовлетворяют фазовым и естественным ограничениям. Допустим, множество D ограничено. Пусть при движении прямой F 1 в положительном направлении вектора  она впервые встретится с многоугольником решений в его вершине, тогда в этом положении прямая F 1 становится опорной, и на этой прямой функция F принимает наименьшее значение. При дальнейшем движении в том же направлении прямая F 1 пройдет через другую вершину многоугольника решений (выходя из области решений), и станет также опорной прямой; на ней функция F принимает наибольшее значение среди всех значений, принимаемых на многоугольнике решений.
она впервые встретится с многоугольником решений в его вершине, тогда в этом положении прямая F 1 становится опорной, и на этой прямой функция F принимает наименьшее значение. При дальнейшем движении в том же направлении прямая F 1 пройдет через другую вершину многоугольника решений (выходя из области решений), и станет также опорной прямой; на ней функция F принимает наибольшее значение среди всех значений, принимаемых на многоугольнике решений.
Таким образом, максимизация линейной функции на многоугольнике решений достигается в точке пересечения этого многоугольника с опорными прямыми, перпендикулярными вектору .
Положение 5. Существование решения и количество решений задачи ЛП основано на анализе взаимного расположения области допустимых решений D и линии уровня.
Если область D ограничена, то возможны два варианта:
А) опорная прямая имеет с многоугольником одну общую точку – одно решение;
|
|
|
Б) опорная прямая параллельна стороне многоугольника (на которой достигается максимум) – множество решений (вся сторона многоугольника).
Если область D не ограничена, то возможны три варианта:
А) опорная прямая имеет с многоугольником одну общую точку – одно решение;
Б) опорная прямая параллельна стороне многоугольника (на которой достигается максимум) – имеется множество решений;
В) не существует опорной прямой (в направлении роста функции) - множество решений пусто (нет решений).
Пример 2.
Решить графически задачу ЛП (1.13)-(1.15).

| (1.13) |

| (1.14) |

| (1.15) |
Решение
Построим область допустимых решений.
Первое неравенство системы (1.14) задает полуплоскость, границей которой является прямая y 1, определяемая равенством  . Построим эту прямую на координатной плоскости x 1 0 x 2 (рис.1.1), искомой полуплоскостью (она заштрихована) будет, та, которая лежит выше этой прямой.
. Построим эту прямую на координатной плоскости x 1 0 x 2 (рис.1.1), искомой полуплоскостью (она заштрихована) будет, та, которая лежит выше этой прямой.
Второе неравенство задает полуплоскость, границей которой является прямая y 2, определяемая равенством  . Также построим прямую y 2 на координатной плоскости и заштрихуем соответствующую полуплоскость.
. Также построим прямую y 2 на координатной плоскости и заштрихуем соответствующую полуплоскость.
Аналогично построим полуплоскости, соответствующие неравенствам три и четыре, их границы y 3 и y 4, определяются уравнениями  и
и  соответственно.
соответственно.
Пересечение этих четырех плоскостей и плоскостей естественных ограничений определяют область допустимых решений D.

Рис. 1.1
Построим вектор-градиент  из начала координат. Проведем линию перпендикулярно вектору
из начала координат. Проведем линию перпендикулярно вектору  . Линия F 1, проходящая через начало координат, соответствует значению 1, поскольку
. Линия F 1, проходящая через начало координат, соответствует значению 1, поскольку  . Мысленно сдвинем линию уровня в направлении вектора . Первое касание многоугольника D соответствует положению F 3. Эта линия является опорной, и ей соответствует минимальное значение, которое достигается на множестве допустимых решений. Продолжим движение линии уровня до выхода из множества D. Этому положению соответствует положение F 7. Рассмотрим крайнюю точку M, которая является точкой пересечения прямых y 3 и y 4, ее координаты можно определить как решение линейной системы.
. Мысленно сдвинем линию уровня в направлении вектора . Первое касание многоугольника D соответствует положению F 3. Эта линия является опорной, и ей соответствует минимальное значение, которое достигается на множестве допустимых решений. Продолжим движение линии уровня до выхода из множества D. Этому положению соответствует положение F 7. Рассмотрим крайнюю точку M, которая является точкой пересечения прямых y 3 и y 4, ее координаты можно определить как решение линейной системы.

Решением системы является пара чисел x 1=4 x 2=2. Этому решению соответствует искомое максимальное значение линейной функции
 .
.
Таким образом, F max=7 при x 1=4 x 2=2.
Вывод. В данном случае линейная функция достигает своего максимального значения в вершине множества решений.
Пример 3.
Решить графически задачу ЛП (1.16) – (1.18).

| (1.16) |
|
| (1.17) |
|
| (1.18) |
Решение
Заметим, что система фазовых ограничений (1.17) совпадает с системой (1.14). Поэтому область допустимых решений D будет той же самой, что и в примере 2 (рис.1.2).
Построим вектор-градиент  из начала координат. Проведем линию перпендикулярно вектору . Линия F1, проходящая через начало координат, соответствует значению 1, поскольку
из начала координат. Проведем линию перпендикулярно вектору . Линия F1, проходящая через начало координат, соответствует значению 1, поскольку  . Мысленно сдвинем линию уровня в направлении вектора . Первое касание многоугольника соответствует положению F 3. Эта линия является опорной, и ей соответствует минимальное значение, которое достигается на множестве допустимых решений. Продолжим движение линии уровня до выхода из множества D,. этому положению соответствует положение F 8. Заметим, что линия уровня параллельна стороне MN, поэтому решением является множество точек лежащих между крайними точками M и N, Точка M является точкой пересечения прямых y 3 и y 4, ее координаты можно определить как решение линейной системы.
. Мысленно сдвинем линию уровня в направлении вектора . Первое касание многоугольника соответствует положению F 3. Эта линия является опорной, и ей соответствует минимальное значение, которое достигается на множестве допустимых решений. Продолжим движение линии уровня до выхода из множества D,. этому положению соответствует положение F 8. Заметим, что линия уровня параллельна стороне MN, поэтому решением является множество точек лежащих между крайними точками M и N, Точка M является точкой пересечения прямых y 3 и y 4, ее координаты можно определить как решение линейной системы.
Решением этой системы является пара чисел x 1=4, x 2=2. Эта пара чисел определяет координаты точки М и в ней достигается искомое максимальное значение линейной функции, равное
 .
.
Таким образом, F max=9, при x 1=4, x 2=2.
Точка N является точкой пересечения прямых y 1 и y 4; ее координаты можно определить как решение линейной системы


Рис.1.2
Решением полученной системы является пара чисел x 1=2/9, x 2=35/9, которые определяют координаты точки N, значение целевой функции в которой равно
 .
.
Таким образом, значение в точке N совпадает со значением в точке M. F max=9, при x 1=2/9, x 2=35/9.
Координаты всех точек, лежащих между M и N можно записать в виде

Значение функции во всех этих точках равно 9.
Вывод. В данном случае линейная функция достигает своего максимального значения во всех точках ребра MN множества решений D.
Пример 4.
Решить графически задачу ЛП (1.19) – (1.21).
|
| (1.19) |

| (1.20) |
|
| (1.21) |
Решение.
Построим область допустимых решений D (рис. 1.3).
Построение области аналогично примеру 2, но в этом построении отсутствует прямая y 4.
Пересечение трех полуплоскостей с учетом естественных ограничений определяет неограниченную область допустимых решений D.

Рис. 1.3
Построим вектор-градиент  из начала координат. Проведем линию перпендикулярно вектору– . Линия F 1, проходящая через начало координат, соответствует значению 1, поскольку .
из начала координат. Проведем линию перпендикулярно вектору– . Линия F 1, проходящая через начало координат, соответствует значению 1, поскольку .
Мысленно сдвинем линию уровня в направлении вектора . Первое касание многоугольника соответствует положению F 3. Эта линия является опорной, и ей соответствует минимальное значение, которое достигается на множестве допустимых решений. Заметим, что многогранник незамкнут в направлении роста целевой функции, поэтому целевая функция не имеет максимума. Это объясняется тем, что для любой линии уровня найдется другая линия уровня, лежащая в направлении вектора , которой соответствует большее значение функции.
Вывод. Целевая функция не ограничена, если многогранник незамкнут в направлении роста целевой функции.
Пример 5.
Решить графически задачу ЛП (1.22) – (1.24).

| (1.22) |
|
| (1.23) |

| (1.24) |
Решение
Построим область допустимых решений D (рис. 1.4), она совпадает с областью в примере 3.
Заметим, что вектор-градиент  направлен в противоположную сторону (по сравнению с рис. 1.3). Максимум достигается в единственной точке Р, являющейся точкой пересечения оси x1 и прямой y 2.
направлен в противоположную сторону (по сравнению с рис. 1.3). Максимум достигается в единственной точке Р, являющейся точкой пересечения оси x1 и прямой y 2.
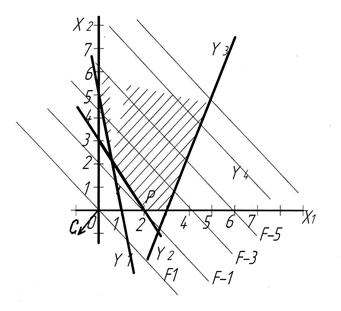
Рис. 1.4
Координаты точки Р можно определить, решив систему уравнений:

Ее решение x 1=2, x 2=0, значение функции в этой точке равно 
Вывод. Задача ЛП имеет решение, когда многогранник замкнут в направлении роста целевой функции.
Рассмотренные примеры иллюстрируют четыре варианта Положения 5.
1.2.2. Основная идея симплекс-метода
Если ранг матрицы А системы (1.1) и ранг расширенной матрицы  системы равен r(r£m), то r переменных
системы равен r(r£m), то r переменных  могут быть выражены через остальные
могут быть выражены через остальные  переменные:
переменные:

| (1.25) |
Переменные (неизвестные)  называются базисными, а весь набор (
называются базисными, а весь набор ( ) – базисом, остальные переменные называются свободными. Система ограничений (1.25) называется системой приведенной к единичному базису.
) – базисом, остальные переменные называются свободными. Система ограничений (1.25) называется системой приведенной к единичному базису.
Отметим важнейшие условия наличия единичного базиса:
· от каждого уравнения в него входит одна и только одна неизвестная;
· каждая переменная из этого набора входит с коэффициентом +1 и отсутствует в остальных уравнениях;
· все значения  ,
, 
Подставляя в линейную форму F (1.3) вместо базисных переменных их выражения через свободные переменные из системы (1.25), получим:

| (1.26) |
Полагая все свободные переменные равными нулю, найдем значения базисных переменных:  . Если все значения , решение (
. Если все значения , решение ( ) системы ограничений является допустимым. Такое допустимое решение называется базисным или опорным, обозначим его через
) системы ограничений является допустимым. Такое допустимое решение называется базисным или опорным, обозначим его через  . Для полученного базисного решения значение целевой функции
. Для полученного базисного решения значение целевой функции  . Решение задачи при помощи симплекс-метода подразумевает ряд шагов, состоящих в том, что от данного базиса
. Решение задачи при помощи симплекс-метода подразумевает ряд шагов, состоящих в том, что от данного базиса  переходим к другому базису
переходим к другому базису  с таким расчетом, чтобы значение целевой функции F увеличивалось или, по крайней мере, не уменьшалось, т.е.
с таким расчетом, чтобы значение целевой функции F увеличивалось или, по крайней мере, не уменьшалось, т.е.  .
.
Геометрическая интерпретация симплекс-метода состоит в том, что аналитическому переходу от одного базиса к другому соответствует переход от одной вершины многогранника (множества допустимых решений) к другой, в которой целевая функция имеет не меньшее значение. Этот факт основан на том, что вершинам многоугольника множества допустимых решений соответствуют опорные решения системы ограничений.
Решение симплекс-методом заканчивается, когда среди опорных решений будет найдено такое, которое обеспечивает максимум линейной формы (1.3). Такое решение называется оптимальным.
1.2.3. Реализация симплекс-метода (простейший случай)
Рассмотрим идею симплекс-метода на конкретном примере:

| (1.27) |

| (1.28) |
| (1.29) |
Решение
Данная система уравнений совместна, так как ранги матрицы системы

и расширенной матрицы
совпадают и равны 3. Следовательно, три переменные (базисные) можно линейно выразить через две свободные переменные. Выразим, например, x1, x2 и x3 через x4 и x5, т.е. приведем систему к единичному базису:

| (1.30) |
Линейная форма  уже выражена через x4 и x5.
уже выражена через x4 и x5.
При x 4 =0 и x 5= 0, найдем значения базисных переменных x1= 1, x2 =2 и x3= 3.
Таким образом, первое допустимое решение имеет вид x1= 1 ,x2 =2, x3= 3, x4 = 0, x5= 0 или (1,2,3,0,0). При найденном допустимом решении линейная форма F имеет значение 0, т.е. F1= 0.
Теперь попытаемся увеличить значение F:
- увеличение x4 уменьшит F, так как перед x4 стоит отрицательный коэффициент, а увеличение x5 даст увеличение;
- будем увеличивать x5 таким образом, чтобы одна из базисных переменных (x 1 или x2 или x3)обратилась в ноль, а остальные базисные переменные оставались бы неотрицательными.
Анализируя первое уравнение системы (1.30), приходим к выводу, что x5 можно увеличить неограниченно. При этом x1 остается положительным и никогда необратиться в ноль. Из второго уравнения системы (1.30) следует, что x5 можно увеличить до 2 (больше увеличивать нельзя, т.к. x2 станет отрицательным). Из третьего уравнения системы (1.24) следует, что x5 можно увеличить до 3. Принимая во внимание приведенный анализ, приходим к выводу, что x5= 2.
Таким образом, получим второе допустимое решение x1= 5, x2= 0, x3= 1, x4 = 0, x5= 2 или (5,0,1,0,2).
Значение линейной формы F при этом допустимом решении равно F2= 2, т.е. значение целевой функции увеличилось.
Примем за свободные переменные x2 и x4., т.е. те переменные, которые в этом решении равны 0. С этой целью из второго уравнения системы (1.27) выразим x5 .
Получим  . Тогда
. Тогда

| (1.31) |
Для увеличения значения F будем увеличивать x4. Проведя аналогичный анализ системы (1.31), заключаем, что x4 можно увеличить до 1/5 (следует из рассмотрения второго уравнения системы (1.31)). Таким образом, получим третье допустимое решение x1= 28/5, x2= 0, x3= 0, x4= 1/5, x5= 12/5 или (28/5, 0, 0, 1/5, 12/5). Значение линейной формы F при этом допустимом решении равно F3=11/5, т.е. значение целевой функции увеличилось.


| (1.32) |
Так как в последней линейной форме обе свободные переменные входят с отрицательными коэффициентами, то наибольшее значение достигается при x2 =0, x3= 0.
Из этого следует, что решение (28/5, 0, 0, 1/5, 12/5) является оптимальным и Fmax= 11/5.
Для того, чтобы упростить трудоемкие операции по пересчету коэффициентов и перезаписи системы ограничений, можно выполнять преобразования специальной симплекс-таблицы.
Симплексные таблицы
Для составления такой таблицы систему фазовых ограничений и целевую функцию необходимо записать в стандартной форме, т.е. сведенной к единичному базису:

| (1.33) |

| (1.34) |
В виде таблицы (табл.1.1) эти данные можно представить так:
Таблица 1.1
| Базисные переменные | 
| … | 
| … | 
|

| … | 
| … | 
| Свободные члены |
|
| … | … | 
| 
| … | 
| 
| ||||
| … | … | … | … | … | … | … | … | ||||
|
| … | … | 
| 
| … | 
| 
| ||||
| … | … | … | … | … | … | … | … | … | … | … | …. |
|
| … | … | 
| 
| … | 
| 
| ||||
| F | … | … | 
| 
| … | 
| 
|
Заметим, что в строку с целевой функцией коэффициенты записываются с противоположным знаком  .
.
Каждой итерации соответствует преобразование симплексной таблицы, в результате которого получается новое базисное решение, которому соответствует первый столбец.
Правила преобразования симплексной таблицы.
1. Выбирают разрешающий столбец из условия  и хотя бы один элемент
и хотя бы один элемент  .
.
2. Выбирают q -ю разрешающую строку из условия

Элемент  , стоящий на пересечении разрешающего (с индексом p) столбца и разрешающей (с индексом q) строки, называется разрешающим элементом.
, стоящий на пересечении разрешающего (с индексом p) столбца и разрешающей (с индексом q) строки, называется разрешающим элементом.
3. В состав базисных переменных вводят переменную  , которую записывают в строку с номером q.
, которую записывают в строку с номером q.
4. Производят пересчет элементов разрешающей q -й строки по формуле

В результате преобразования получают единицу на месте разрешающего элемента.
5. Вычисляют элементы всех остальных строк (при k¹p) по формуле:

Строке с номером r+ 1 соответствует строка целевой функции, столбцу с номером n+ 1 соответствует столбец свободных членов.
Другими словами, умножая разрешающую строку на подходящие числа и прибавляя ее к остальным строкам, добиваются, чтобы остальные элементы разрешающего столбца стали равными нулю.
6. Далее анализируем полученную таблицу. Если решение получено или выяснено, что его нет, процесс решения закончен. Иначе переходим к пункту 1.
Анализ базируется на основной теореме симплекс-метода.
Теорема.
Если после выполнения очередной итерации (преобразования):
1) найдется хотя бы один отрицательный коэффициент  , и в каждом столбце с таким коэффициентом окажется хотя бы один положительный элемент, то можно улучшить решение, выполнив следующую итерацию;
, и в каждом столбце с таким коэффициентом окажется хотя бы один положительный элемент, то можно улучшить решение, выполнив следующую итерацию;
2) найдется хотя бы один отрицательный коэффициент , и в соответствующем столбце не содержится положительных элементов, то функция F не ограничена в области допустимых решений;
3) все коэффициенты окажутся неотрицательными, то оптимальное решение достигнуто.
Рассмотрим решение той же задачи (1.27) - (1.29) с помощью симплекс-таблиц.
Исходная симплекс-таблица, определяемая соотношениями (1.27) - (1.29) показана на рис. 1.5.
| Базисные переменные | x1 | x2 | x3 | x4 | x5 | Свободные члены |
| x1 | -2 | |||||
| x2 | -2 | |||||
| x3 | ||||||
| F | -1 |
Рис.1.5. Исходная симплекс таблица
Заметим, что целевая функция в данном примере может быть записана в виде  , что соответствует виду (1.34). В качестве разрешающего столбца выберем столбец, соответствующий x 5 , поскольку в нем в строке с целевой функцией стоит отрицательный элемент (– 1).
, что соответствует виду (1.34). В качестве разрешающего столбца выберем столбец, соответствующий x 5 , поскольку в нем в строке с целевой функцией стоит отрицательный элемент (– 1).
Для определения разрешающей строки заполним вспомогательный столбец (рис. 1.6).
Первая клетка в этом столбце оставлена пустой, поскольку в соответствующей клетке столбца x5 стоит отрицательный элемент (– 2).
Из этого столбца выбираем минимальное значение min{2;3}=2; это значение стоит во второй строке, поэтому берем её в качестве разрешающей.
| Базисные переменные | x1 | x2 | x3 | x4 | x5 | Свобод-ные члены | Вспомога-тельный | |
| x1 | -2 | |||||||
| x2 | -2 | 2/1=2 | ||||||
| x3 | 3/1=3 | |||||||
| F | -1 | |||||||
|
|
|
