 |


2.5.1. Использование метода понижения порядка производной для составления схемы моделирования.
|
|
|
|

Разрешим относительно старших производных:
Формируем левую часть уравнения, начиная с суммирующего блока.
Переменные  считаем условно известными
считаем условно известными  получаем
получаем  (со знаком «минус», поскольку каждый этап преобразования осуществляется инвертирующим ОУ)
(со знаком «минус», поскольку каждый этап преобразования осуществляется инвертирующим ОУ)
Формируем правую часть путём непосредственного интегрирования – получаем последовательно  .
.
Замыкаем выходы блоков на соответствующие входы с учётом знака, в случае необходимости вводим инверторы.
| ∑ |
| y |
| –x |

|
| b/a2 |
| a0/a2 |
| a1/a2 |

|

|
|

|
| ∫ |
| ∫ |
Поскольку в линейной системе действует принцип суперпозиции, операции суммирования и интегрирования можно совместить, в результате схема упрощается
| y |
| –x |
|
|
| b/a2 |
| a0/a2 |
| a1/a2 |
|
|
|

|
| ∫ |
| ∫ |
Схема готова – можно переходить к расчёту.
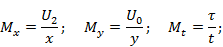
Выбор масштабных коэффициентов:
На основе 3-й системы электромеханических аналогий все переменные исходных уравнений представлены напряжениями в различных точках модели.
Масштабный коэффициент показывает, какое напряжение соответствует единице физической переменной: 
Для повышения точности решения задачи стремятся использовать всю шкалу возможных значений машинных переменных, поэтому масштаб стремятся выбирать из условия: 
Правильным выбором масштабных коэффициентов можно уменьшить разброс величин коэффициентов машинных уравнений, а, следовательно, повысить точность решения. Необходимо лишь не допускать выхода машинных переменных за границы допустимых значений.
ПРИМЕР:
 начальные условия:
начальные условия: 

Введём масштабные коэффициенты:

Разрешим относительно старших производных:
|
|
|
Для уменьшения разброса коэффициентов примем
 .
.
Тогда: 
При этом если 




2. 5. 2. Выбор масштаба времени:
Обусловлен желаемым временем решения задачи с учётом ограничений, накладываемых частотными характеристиками решающих блоков, регистрирующих устройств, коммутирующих элементов, а также погрешностями интегрирующих блоков, обусловленных, например, утечками в конденсаторах и т. д.
Масштаб времени входит в машинные уравнения в виде множителей при производных, зависящих от порядка производных:
 ;
;  ;
;  .
.
Стремление ускорить масштаб времени обусловливается как желанием быстрее получить результат, так и уменьшить погрешность от дрейфа. Однако ускорение ограничено возрастанием величин производных, что приводит к насыщению решающих блоков (нелинейный режим - ошибка)
Правильный выбор  может способствовать сокращению разброса параметров параметров при реализации жёстких уравнений.
может способствовать сокращению разброса параметров параметров при реализации жёстких уравнений.
ПРИМЕР:


Перейдём к машинному уравнению:

Разрешаем относительно старшей производной
Пусть
 ;
;
тогда

Замена переменных:
Для решения уравнений, в которых независимая переменная не являются временем, осуществляют замену этой переменной на время путём подстановки.  (
(  )
)
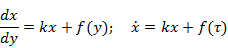
и далее решают обычным способом как обычное дифференциальное уравнение временным аргументом.
2. 5. 3. Расчёт коэффициентов передачи решающих блоков:
После составления функциональных схем набора требуется определить коэффициенты передачи по входам решающих блоков. Порядок может быть следующий:
По функциональной схеме записать уравнения, связывающие машинные переменные входах и выходах решающих блоков.
Полученную систему уравнений разрешить относительно входных и выходных переменных моделируемой системы.
Машинные переменные заменить исходными с учётом масштабных коэффициентов.
Приравнивая коэффициенты при соответствующих производных исходных и полученных уравнений, получают систему уравнений, связывающую коэффициенты исходных уравнений с коэффициентами передачи решающих блоков.
|
|
|
ПРИМЕР:
Колебательное звено: 
Уравнение в операторном виде:



Для функциональной схемы:
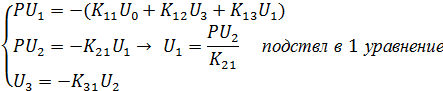
Подставляем: 





Поскольку число уравнений меньше числа неизвестных коэффициентов, некоторые из них можно задавать из условия распределения коэффициентов по блокам в пределах максимально допустимых значений.
Общее правило: коэффициент  исходного уравнения равен произведению коэффициента передачи контура, внутри которого определяется переменная, стоящая при определяемом коэффициенте, умноженному на
исходного уравнения равен произведению коэффициента передачи контура, внутри которого определяется переменная, стоящая при определяемом коэффициенте, умноженному на  , где
, где  - число интеграторов в контуре.
- число интеграторов в контуре.
Коэффициент в правой части исходного уравнения равен произведению К передачи от места приложения воздействия до выхода системы, умноженному на отношение  входных и выходных переменных и
входных и выходных переменных и  , где n – порядок дифференциального уравнения.
, где n – порядок дифференциального уравнения.
Начальные условия преобразуем в соответствием с масштабным соотношением, т. е.  ;
;  ;
;  .
.
При программировании систем ДУ функциональные схемы строят отдельно для каждого уравнения и затем осуществляют необходимые связи.
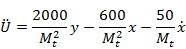
ПРИМЕР: Моделирование движения ЛА в вертикальной плоскости.

Здесь
 - тангаж
- тангаж
 - траекторный угол
- траекторный угол
 - угол атаки
- угол атаки
 - угол поворота руля высоты
- угол поворота руля высоты
Коэффициенты отражают свойства ЛА
 - аэродинамическое демпфирование
- аэродинамическое демпфирование
 - статическая устойчивость
- статическая устойчивость
 - эффективность руля высоты
- эффективность руля высоты
 - маневренные возможности ЛА
- маневренные возможности ЛА
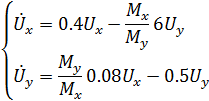
Приведём к виду удобному для набора:


2. 5. 4. Воспроизведение дробно-рациональных передаточных функций
методом комбинирования производных
Преобразуем исходную ПФ
 ,
,
вводя новую переменную u:
 . (1)
. (1)
В результате получаем
 ,
,
в дифференциальной форме:
 . (2)
. (2)
Выражение (1) также можно записать в дифференциальной форме:
 . (3)
. (3)
Для составления структурной схемы набора необходимо сначала «набрать» уравнение (3) по методу понижения порядка производной, а затем образовать искомую переменную у в виде суммы производных от и с соответствующими коэффициентами. Значения производных  получаются непосредственно с соответствующих выходов интеграторов при решении уравнения (3). Некоторое упрощение схемы набора может получиться, если в уравнении (2) исключить старшую производную u подстановкой её значения из уравнения (3).
получаются непосредственно с соответствующих выходов интеграторов при решении уравнения (3). Некоторое упрощение схемы набора может получиться, если в уравнении (2) исключить старшую производную u подстановкой её значения из уравнения (3).
|
|
|
В результате приходим к уравнениям


Функциональная схема реализации этих уравнений для т = п = 3приведена на рисунке. В общем случае для набора необходимо иметь п + 3 решающих блока. Для определения коэффициентов при наборе задачи не требуется выполнения трудоёмких вычислений.
∫
| ∫ |
| ∫ |
| ∫ |
| ∑ |
| x |
| –x |
| b3 |
| b3a2+b2 |
| –b3a0+b0 |
| –b3a1+b1 |

|

|

|

|

|
Функциональная схема реализации дифференциального уравнения,
составленная по методу комбинирования производных.
|
|
|
