 |


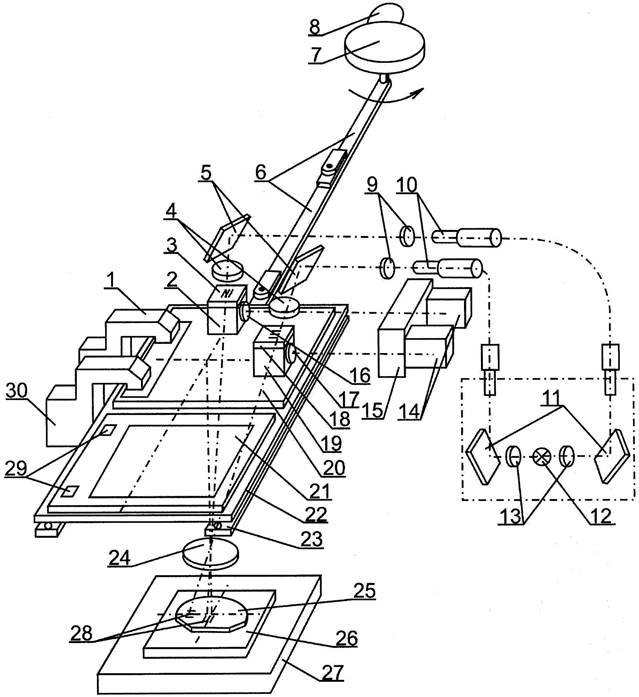
Схема датчика координатной измерительной системы
|
|
|
|

10 - лазерный луч
11 - выходной пучок
12, 13, 14 - светоделительные зеркала
15 линзы
16 - растры
I - вспомогательный канал
II, III — рабочий канал
Координатная измерительная система контролирует положение координатного стола с подложкой относительно проекционного объектива. Для этого производится преобразование механических перемещений стола в электрические сигналы, которые используются для управлением приводом стола. Система включает в себя два канала преобразования перемещений по оси У и один канал по оси X, что позволяет контролировать также угловой разворот стола 2. Все три преобразователя перемещений построены идентично, каждый из них содержит лазерный излучатель, прозрачную дифракционную решётку, уголковый отражатель, закреплённый на держателе объектива 3, датчик 6, зеркало 5. В среднем датчике используется также отклоняющие зеркала 8.
Луч He-Ne лазера после телескопического расширителя 9 проходит сквозь отверстие датчика 6 и под углом 42' к горизонтальной плоскости падает на дифракционную решётку 1. Дифракция лазерного луча на решётке приводит к появлению нескольких максимумов освещённости, расходящихся под разными углами φ к направлению падения лазерного луча. Эти углы могут быть рассчитаны по формуле sin Y=mλ/d. Где λ=0,63 мкм - длинна волны He-Ne лазера, d - шаг дифракционной решётки, m=0,1,2 порядок дифракции. Так при d= 4 мкм для используемого лазерного излучения максимум нулевого порядка лежит на направление лазерного луча, максимумы 1,2 порядков составляют с этим направлением углы 9 и 18° соответственно.
Пучки расходящиеся под углом 9° отражаются от зеркальных поверхностей угловых отражателей 4, закреплённых на неподвижном держателе объектива, и возвращаются на дифракционную решётку. После повторной дифракции пучков снова образуется несколько дифракционных максимумов, расходящихся под разными углами относительно падающих на решётку пучков. Максимумы 1 -го порядка каждого из этих пучков распространяется вдоль направления падающего на решётку лазерного луча 10, при этом они накладываются друг на друга, формируя единый выходной пучок 11, этот пучок идёт под углом 42* к горизонтальной плоскости и составляет угол 1°24' с подающим лучом 10. Поскольку формирующие пучок 11 лучи когерентны они интерферируют между собой, образуя систему интерференционных полос максимальной и минимальной освещённости. Светоделительные зеркала 12,13,14 направляют пучок 11 на линзу 15 вспомогательного (I) и двух рабочих(II и III) каналов датчика 6. Линзы 15 фокусируют пучок на светочувствительных площадках фотодиодов датчика. В каналах II и III перед линзами установлены растры 16. Они выполнены в виде наборов прозрачных и непрозрачных линий одинаковой ширины с шагом 1 мм, установленных параллельно интерференционным полосам пучка 11. При смещении интерференционных полос поперёк растров происходит модуляция светового потока, попадающего в фотоприёмник. Это приводит к появлению синусоидальной переменной составляющей в сигнале фотоприёмника. Для контроля направления перемещения стола переменные составляющие должны иметь фазовый сдвиг, равный 90°. Такой сдвиг обеспечивается за счёт смещения растра, установленного в канале III в направлении, перпендикулярном направлению штрихов. При настройке системы ширину интерференционных полос можно регулировать разворотом уголкового отражателя 4.
|
|
|
Система совмещения.
Система совмещения установки выполнена на базе фотоэлектрического микроскопа (ФЭМ), контролирующего положение знаков совмещения п/п относительно оси проекционного объектива.
|
|
|
Источник света 12, который через конденсоры 13, зеркало 11, волокнооптические световоды 10, светофильтры 9 и зеркала 5 направляет два луча на линзы 4, а через них на маски 3,18.Маски выполнены на верхних торцах светоделительных кубиков 2 и 19 закреплённых на измерительном ф/ш 20. Объектив 24 проецирует изображение реперных знаков масок З и 18 на поверхности подложки 25, перемещающийся на индукторе 26 относительно статора ЛШД. Отразившиеся от подложки лучи, в обратном направлении образуют в фокальной плоскости объектива т.е. в плоскости масок 3 и 18 автоколлимационное изображение их реперных знаков. Формирующие это изображение лучи отклоняются полупрозрачными гранями кубиков 2 и 19 на линзы 16,17 установленных на кубиках. Эти линзы строят уменьшенное изображение зрачка объектива 24 в плоскости фотоприёмников 14 датчика совмещения 15. Спектральный диапазон излучения, выделяемый диэлектрическими зеркалами 11, светофильтрами 9 и материалом масок 3 и 18 составляет 0,52 - 0,59 мкм.
Реперные знаки масок 3 и 18 выполнены в виде набора нерегулярно расположенных щелей в маскирующем покрытии, их изображение на подложке выглядит в виде светящихся полос. Реперные знаки подложки 28 аналогичны по форме и размерам знакам масок.
Отличие их состоит в том, что они выполнены в виде полос, рассеивающих падающее от них излучение. Расстояние между штрихами реперных знаков на маске и подложке выбрано таким, что при любом их взаимном положении, кроме одного точного, одновременно совпадают не более одного штриха. При точном совмещении происходит полное совпадение всех штрихов на подложке и маске. Поскольку знаки на подложке рассеивают излучение, момент совмещения знаков соответствует минимуму светового потока, попадающему через объектив 24 в фотоприёмники 14. По сигналам фотоприемников координатная измерительная система производит отсчёт координаты знака на подложке. После точной ориентации подложки и отсчёта координат её реперных знаков измерительный ф/шаблон заменяется ПФО. Для этого каретка 22 с закреплённым на ней ПФО 21 и измерительным шаблоном 20 смещается на шариковых направляющих 23 вдоль оси У. Привод каретки включает электродвигатель 8, червячный редуктор 7 и тяги 6. Крайние положения каретки задаются упорами, для точной ориентации измерительного шаблона и ПФО используются знаки базирования 29, положение которых контролируется датчиками базирования 1 и 30.
|
|
|
Система автофокусировки.
Необходимость применения такой системы и требования к ней определяются оптическими свойствами объективов. Глубина резкости ∆Z высокоразрешающих проекционных объективов определяется длинной волны ультрафиолетового излучения λи числовой апертурой объектива А: ∆Z= λ/2А2
Для типовых значений λ =0,436 и А=0,25 - 0,28 глубина резкости составляет ∆Z=2,8 - 3,5 мКм. Неплоскостность п/п, особенно прошедших высоко температурную обработку, значительно превышает эти значения. В связи с этим на каждом шаге мультипликации производится точное размещение экспонируемой зоны подложки в пределах глубины резкости объектива. В установке ЭМ-584 используется оптический датчик фокусировки.
Апертура (отверстие) лат. - действующее отверстие оптической системы, определяемое размерами линз или диафрагм.
Угловая апертура - угол α между крайними лучами конического светового пучка, входящего в
оптическую систему.
Числовая А равна n sin α/2, где n - показатель преломления среды, в которой находится предмет.
Освещённость изображения пропорциональна квадрату числовой Апертуры. Разрешающая способность прибора (min расстояние между 2-мя близлежащими точками, при котором они всё ещё видны отдельно) пропорциональна апертуре.
Схема системы фокусировки

1 - волоконные световоды
2,7 - призма
3 - светофильтры
4,16,17-линзы
5 - бипризма
6 - лимба
8,9,10,11 -зеркала
12 - входной зрачок объектива
13 – подложка
14,15 -растры
18,19 - счетверенные фотодиоды
Световые потоки от волоконных световодов 1 направляются на призму 2, далее проходят через светофильтр 3, линзу 4 и с помощью бипризмы 5 освещают участки лимб. Прошедшие через лимб световые потоки отклоняются призмой 7, зеркалами 8,9,10,11 в направлении входного зрачка объектива 12. Увеличение линзы 4 выбрано таким, чтобы изображение торцов световодов 1 располагались в пределах входного зрачка объектива и были при этом максимально разнесены друг от друга. С помощью зеркал 8,9,10,11 изображение торцов световодов построены левыми и правыми каналами датчика, в плоскости зрачка объектива накладываются друг на друга. Объектив строит изображение освещенного участка лимба каждого канала, а на поверхности подложки 13 в не пределах рабочего поля кадра 10* 10. Отражённое от подложки излучение через объектив и зеркала 8,9,10,11 освещает растры 14,15. При этом на анализирующих растрах строится изображение лимба 6 освещенного лучами идущими под одинаковыми углами к оптической оси датчика от источников 1. Световые потоки, прошедшие растры, линзами 16,18 проецируются в плоскость фотоприёмных площадок счетверённых фотодиодов 18,19. увеличение линз 16,17 выбрано так чтобы на каждый из двух светочувствительных площадок счетверённого фотодиода строилось изображение торца только одного светодиода. Если подложка находится в плоскости, оптически сопряженной с плоскостью штрихов лимба 6, то изображение лимба построенные лучами обоих источников, лежат в плоскости штрихов анализирующего растра и совпадают друг с другом. При неподвижном лимбе и точном наложении в одной плоскости его штрихов на штрихи анализирующего растра световые потоки приходящие к светочувствительным площадкам фотоприёмника, равны по величине. Расфокусировка приводит к смещению плоскости резкого изображения лимба относительно плоскости штрихов растра и к ослаблению световых потоков, поступающих на площадку фотоприёмника. Это происходит из-за частичного экранирования непрозрачными штрихами растров 14,15 лучей, строящих изображение прозрачных участков лимба 6. Смещение изображений штрихов лимба перпендикулярно оптической оси приводит к увеличению светового потока на одну из площадок фотоприёмника и уменьшение потока на его вторую площадку. Поэтому при вращении лимба 6 изображение его штрихов перемещаются, по анализирующему растру, а световые пучки, строящие изображения прозрачных участков лимба периодически перекрываются непрозрачными штрихами анализирующих растров 14,15. Это приводит к модуляции световых потоков, поступающих на площадку фотоприёмников. При точной фокусировке световые потоки модулируются синхронно и переменные составляющие сигналов фотоприёмников не имеют сдвига фаз. При расфокусировке возникает фазовый сдвиг между сигналами двух площадок каждого фотоприёмника. Знак фазового сдвига и его величина указывает соответственно на направление и величину расфокусировки. Сигналы вырабатываемые двумя каналами датчиков фокусировки, поступает через систему управления на привод подъёма стола.
|
|
|
Оборудование для перспективных методов литографии.
|
|
|
Оборудование для электронной литографии.
Электролитография предназначена для формирования топологических рисунков в чувствительных к электронам резистах. Электронно-лучевые установки (ЭЛУ) могут проводить экспонирование электронорезиста тонко сфокусированными пучками электронов, отклонёнными электрическими и магнитными полями по программе ЭВМ. Электронно-оптические системы позволяют также проводить одновременный перенос изображения шаблона или маски на участках электронного резиста. Ø электронного пучка 2-5 мКм, плотность тока в пятне 10-100 А/см2.
Элу состоит из:
Электронно-оптической системы (ЭОС);
прецизионного координатного стола;
Вакуумной системы;
Устройство загрузки-выгрузки пластин;
ЭВМ, управляющей работой всех систем;
ИПСы;
Контрольной системы;
Система ЭОС 
А в т о м а т 08ФН-125/200-004 предназначен для нанесения фоторезиста на полупроводниковые пластины диаметром 76, 100 и 125 мм методом центрифугирования и может работать в составе линии фотолитографии "Лада-125" или автономно в комплекте с блоком обеспыливания "Лада-2". Автомат состоит из двух одинаковых и действующих независимо друг от друга треков, на которых выполняется полный цикл обработки полупроводников пластин, заключающийся в транспортировке их из подающей кассеты на рабочую позицию (столик центрифуги), нанесении фоторезиста в соответствии с заданной программой, съеме и транспортировке в приемную кассету.
Основанием автомата служит каркас, внутри которого смонтированы треки, блоки и пульты управления, а также вентиляционные и канализационные трубопроводы, выведенные на заднюю стенку. Кроме того, на общем каркасе расположены два блока клапанов для каждого трека. Емкости с растворами, соединенные гибкими шлангами с блоками клапанов и далее с насадками, размещены автономно.

Устройство нанесения фоторезиста:
1 - вентиляционный коллектор, 2 - стакан, 3, 14, 19 - кольца, 4, 24 - гайки, 5 - фланец, 6, 13 - штоки, 7, 18 - верхняя и нижняя плиты, 8,15,17, 31 - крышки, 9, 16 - пружины, 10, 26 - подшипники, 11 - манжета, 12 - отстойник, 20, 34 -втулки, 21 -- электродвигатель, 22 - ремень, 23, 29 - амортизаторы, 25 - корпус, 27 - ловушка, 28, 30, 33 - отражатели, 32, 37 - насадки, 35 - столик, 36 - пластина, 38 - вал; А-Ж - штуцера
Центрифуга устройства нанесения фоторезиста подвешена на'нижнем резинометаллическом амортизаторе 23, закрепленном на верхней плите 7. С фланцем 5 амортизатора 23 соприкасается навернутая на резьбовую часть корпуса 25 центрифуги гайка 4, на которую сверху через уплотнительные прокладки надет стакан 2, прижимаемый кольцом 3. Через корпус 25 проходит полыйвал 38, опорами которого служат подшипники 10 и 26, закрытые сверху втулкой 34, а снизу манжетой 11. На нижнем конце полого вала имеется шкив, с помощью которого он получает вращение через плоский ремень 22 от электродвигателя 21, закрепленного на нижней плите 18 в эксцентриковой втулке 20 кольцом 19. Здесь же смонтирован отстойникпродуктов обработки, закрепленный на кронштейне корпуса 25 и защищающий вакуумную систему от попадания в нее продуктов обработки.
На верхнем конце полого вала установлен вакуумный патрон 35 центрифуги (столик), на который помещается полупроводниковая пластина 36, удерживаемая при обработке вакуумом, создаваемым вакуумным насосом через полый вал 38, отстойник 12, штуцер Ж, трубопровод и штуцер Б.
Верхний амортизатор 29 центрифугисоединен со стаканом 2, к которому прижата опорная поверхность ловушки 27 продуктов обработки. Подъем ловушки до упора в амортизатор 29 осуществляется штоком 6 дифференциального пневмоцилиндра, жестко подвешенного на плите 7. Между полупроводниковой пластиной 3 6, отражателем 28 и другими деталями создается полость, в которую через штуцер Г, полость штока 6, штуцера Д и Е, отверстия в гайке 4 и стакан 2 подается под давлением инертный газ. Под таким же давлением инертный газ поступает для работы пневмоцилиндра в штуцер Д.
Ловушка 27 соединяется верхней частью с крышкой 31, с которой, в свою очередь, соединены насадка 32 и вентиляционный коллектор 1. Это обеспечивает удаление продуктов обработки из производственного
помещения, а также предотвращает попадание отраженных капель рабочих растворов на поверхность полупроводниковой пластины.
В нижней крышке 15 пневмоцилиндра вертикально перемещается управляющий шток 13 с уплотняющими резиновыми кольцами 14, перекрывающий под действием пружины 16 отверстие, сообщающееся с атмосферой, и одновременно открывающий отверстие, сообщающееся через штуцер А с вакуумной системой.
Когда на столик центрифуги укладывают очередную полупроводниковую пластину, автомат начинает работать в такой последовательности. В штуцер В подается сжатый инертный газ, и шток б пневмоцилиндра, а также управляющий шток 13 начинают подниматься вверх. Шток 6 поднимает ловушку 27 до ее упора в амортизатор 29 и открывает подачу инертного газа под полупроводниковую пластину через штуцера Д и К Одновременно верхний торец крышки 31 ловушки соединяется с насадкой 32. Шток 13 открывает сообщение с вакуумной системой через штуцера А, Б и Ж, полый вал и столик центрифуги и одновременно закрывает в крышке 15 отверстие, сообщавшееся с атмосферой.
Таким образом, рабочий объем центрифуги оказывается замкнутым, продуваемым инертным газом и вентилируемым. Далее через насадки 37 производится обработка полупроводниковой пластины: промывка растворителем или поверхностно-активным веществом, сушка, дозированная подача фоторезиста, выдержка паузы для растекания фоторезиста по поверхности и его центрифугирование. Время выполнения операций (кроме дозирования фоторезиста) можно задавать от 1 до 99 с с интервалом через 1 с, а время дозирования фоторезиста — от 0,1 до 9,9 с с интервалом через 0,1 с.
После окончания обработки полупроводниковой пластины снимается давление в нижней полости пневмоцилиндра соединением ее с атмосферой через штуцер В. Шток 6 и закрепленная на нем ловушка 27 под действием давления инертного газа в верхней полости пневмоцилиндра опускаются вниз. Этим же штоком перекрывается отверстие подачи под пластину инертного газа через штуцер Д, верхний торец крышки 31 ловушки отделяется от насадки 32 вытяжного коллектора 1 и постоянно работающей вентиляционной системой удаляются продукты обработки. Опорная поверхность ловушки 27 отходит от амортизатора 29, и центрифуга остается подвешенной на одном нижнем амортизаторе 23. При налагай штоком 6 на управляющий шток 13 вакуумная система перекрывается и открывается отверстие, соединяющее полость с атмосферой. При этом полупроводниковая пластина расфиксируется и удаляется транспортной системой с рабочей позиции.
Раздел 11
|
|
|
