 |


Программные средства настройки
|
|
|
|
Типовая система для настройки ПИД-регулятора состоит из компьютера с программным обеспечением под Windows, комплекта модулей ввода-вывода и соединительных кабелей. Объект включается в контур регулирования, система настраивается желаемым способом, затем полученный коэффициенты регулятора записываются в ПИД-контроллер. Благодаря удобному пользовательскому интерфейсу, большой производительности компьютера и отсутствию ограничений на алгоритмы идентификации системы удается получить параметры регулятора, близкие к оптимальным.
В настоящее время имеется около полусотни коммерческих продуктов [292] для настройки ПИД-регуляторов. Среди них LabVIEW PID Control Toolset фирмы National Instruments,
Перед началом работы Системы пользователю предлагается меню для ввода априорной информации об объекте регулирования:
• диапазон изменения входного и выходного сигналов объекта;
• тип процесса в объекте управления: интегрирующий или нет;
• желаемые единицы измерения;
• структура контроллера (идеальная, последовательная или параллельная); частота дискретизации;
• постоянная времени фильтра в измерительном канале.
Нечеткая логика, нейронные сети и генетические алгоритмы:
ПИД-регуляторы, описанные выше, имеют плохие показатели качества при управлении нелинейными и сложными системами, а также при недостаточной информации об объекте управления. Характеристики регуляторов в некоторых случаях можно улучшить с помощью методов нечеткой логики, нейронных сетей и генетических алгоритмов.
Нечеткое управление (управление на основе методов теории нечетких множеств используется при недостаточном знании объекта управления.Примером может быть доменная печь или ректификационная колонна,
|
|
|
. Основная идея этой теории состоит в следующем. Если в теории четких множеств некоторый элемент (например, температура 50 °С) может принадлежать множеству (например, множеству «температура горячей воды Тгор») или не принадлежать ему, то в теории нечетких множеств вводится понятие функции принадлежности, которая характеризует степень принадлежности элемента множеству. При этом говорят, например, «температура 50 °С принадлежит множеству Тгор со степенью принадлежности 0,264».
Нечеткая логика в ПИД-регуляторах используется преимущественно двумя путями: для построения самого регулятора и для организации подстройки коэффициентов ПИД-регулятора. Оба пути могут использоваться в ПИД-контроллере одновременно.
Принципы построения нечеткого ПИ-регулятора. Для применения методов нечеткой логики прежде всего необходимо преобразовать обычные четкие переменные в нечеткие. Процесс такого преобразования называется фаззификацией

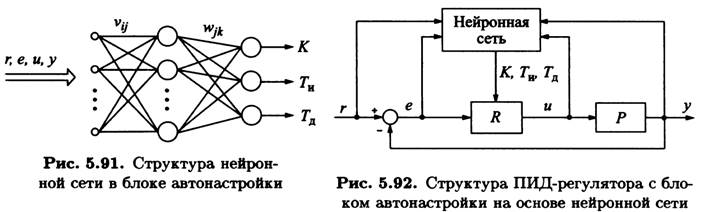
Искусственные нейронные сети
Нейронные сети, как и нечеткая логика, используются в ПИД-регуляторах двумя путями: для построения самого регулятора и для построения блока настройки его коэффициентов. Нейронная сеть обладает способностью «обучаться», что позволяет использовать опыт эксперта для обучения нейронной сети искусству настройки коэффициентов ПИД-регулятора.
Самой сложной частью в проектировании регуляторов с нейронной сетью является процедура обучения. «Обучение» состоит в идентификации неизвестных параметров
Генетические алгоритмы
Генетические алгоритмы являются мощным методом оптимизации, позволяющим найти глобальный оптимум быстрее, чем другие методы случайного поиска.
Для применения генетических алгоритмов необходимо преобразовать переменные, фигурирующие в условии задачи, в генетические переменные. Такое преобразование задается схемой кодирования. Переменные могут быть представлены в двоичной форме, в форме действительных десятичных чисел или в другой форме, в зависимости от смысла решаемой задачи.
|
|
|
Выбор технических средств управления технологическими процессами. ПЛК, промышленные компьютеры, рабочие стации, панельные компьютеры, SoftPLC, PAC-контроллеры. Типы, характеристики ПЛК и критерии выбора. Компьютер в системах автоматизации. Виды компьютерных шин компьютеров автоматизации.
Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
ПЛК используются практически во всех сферах человеческой деятельности для автоматизации технологических процессов, в системах противоаварий-ной защиты и сигнализации, в станках с ЧПУ, для управления дорожным движением, в системах жизнеобеспечения зданий, для сбора и архивирования данных, в системах охраны, в медицинском оборудовании, для управления роботами, в системах связи, при постановке физического эксперимента, для управления космическими кораблями, для автоматизации испытаний продукции и т.д. Тем не менее до сих пор остается много отраслей экономики, куда контроллерная автоматизация только начинает проникать.
|
|
|
