 |


Описание лабораторной установки
|
|
|
|
В качестве лабораторной установки используется привод ПМУ-М, принципиальная схема которого представлена на рис.6.9.
Регулирование скорости вращения привода осуществляется вниз от номинальной скорости электродвигателя путем изменения напряжения на якоре, при неизменном напряжении возбуждения. Напряжение к якорю двигателя подается от статического преобразователя переменного тока в постоянный. Для изменения выпрямленного напряжения, служат магнитные усилители, рабочие обмотки ( ) которых включены в плечи выпрямителя 1В, выполненного для приводов серии ПМУ1М и ПМУ2М по однофазной схеме выпрямления, а для приводов серий ПМУ5М, ПМУ6М, ПМУ7М по трехфазной схеме выпрямления.
) которых включены в плечи выпрямителя 1В, выполненного для приводов серии ПМУ1М и ПМУ2М по однофазной схеме выпрямления, а для приводов серий ПМУ5М, ПМУ6М, ПМУ7М по трехфазной схеме выпрямления.
Изменение величины выпрямленного напряжения происходит за счет изменения реактивного сопротивления рабочих обмоток магнитного усилителя, величина которого определяется током нагрузки и током, протекающим в обмотке управления  . Чем больше ток нагрузки и ток управления, тем меньше реактивное сопротивление рабочих обмоток, тем больше значение выпрямленного напряжения, подводимого к якорю двигателя.
. Чем больше ток нагрузки и ток управления, тем меньше реактивное сопротивление рабочих обмоток, тем больше значение выпрямленного напряжения, подводимого к якорю двигателя.
Такой выпрямитель имеет большое внутреннее сопротивление, обусловленное сопротивлением рабочих обмоток магнитного усилителя и выпрямителей. Большое внутреннее сопротивление является причиной недопустимо большой погрешности привода от колебаний нагрузки, сетевого напряжений и нагрева.
С целью снижения этой погрешности в схеме привода имеются внутренняя обратная связь по току и две внешние связи: отрицательная и положительная по току. Таким образом, схема привода представляет собой замкнутую систему автоматического регулирования скорости вращения электродвигателя.
|
|
|
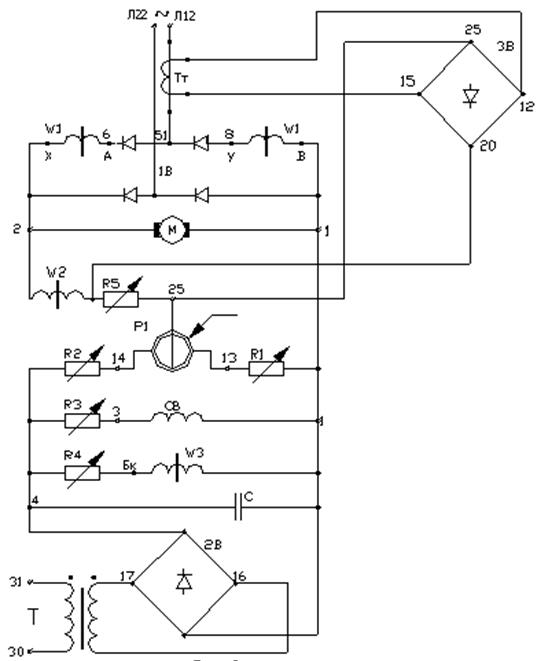
Рис. 6.9. Принципиальная электрическая схема привода ПМУ-М
Внутренняя обратная связь по току достигается включением в плечи выпрямителя 1В рабочих обмоток () магнитного усилителя, через каждую из которых протекает однополупериодный ток, содержащий постоянную и переменную составляющие. Чем больше постоянная составляющая, тем ниже индуктивное сопротивление рабочих обмоток магнитного усилителя.
Величина постоянной составляющей тем больше, чем больше ток нагрузки. Благодаря этому внутреннее сопротивление выпрямителя автоматически снижается с ростом нагрузки и наоборот.
Отрицательная обратная связь по напряжению и положительная обратная связь по току достигается питанием обмотки управления от трех источников: от задающего потенциометра Р1, якоря двигателя и трансформатора тока Тт. Результирующий ток в обмотке зависит от алгебраической суммы трех напряжений: задающего -  , напряжения на якоре двигателя
, напряжения на якоре двигателя  и напряжения
и напряжения  токовой связи, снимаемого с сопротивления R 5. Сопротивление R 5 является нагрузкой выпрямителя 3В. Выпрямитель 3В включен на выходе трансформатора тока Тт. Поэтому, является функцией тока в якоре двигателя. При изменении нагрузки на валу двигателя, например, при ее увеличении ток якоря растет. В первый момент скорость вращения двигателя снижается. Это обусловлено увеличением падения напряжения на якоре и уменьшением подводимого к якорю напряжения.
токовой связи, снимаемого с сопротивления R 5. Сопротивление R 5 является нагрузкой выпрямителя 3В. Выпрямитель 3В включен на выходе трансформатора тока Тт. Поэтому, является функцией тока в якоре двигателя. При изменении нагрузки на валу двигателя, например, при ее увеличении ток якоря растет. В первый момент скорость вращения двигателя снижается. Это обусловлено увеличением падения напряжения на якоре и уменьшением подводимого к якорю напряжения.
После этого вступает в действие система автоматического регулирования. Так как задающее напряжение остается неизменным, а напряжение на якоре уменьшается, то разность между ними возрастает. Ток в обмотке управления (), включенной на эту разность, увеличивается. Кроме того, он увеличивается благодаря действию узла токовой связи, т.к. увеличение нагрузки влечет за собой рост тока в цепи якоря, или, что то же самое, увеличение тока, потребляемого из сети. В результате этого на выходе выпрямителя 3В увеличивается напряжение, обеспечивающее увеличение тока в обмотке . Нарастание тока в обмотке увеличивает намагничивание сердечников магнитных усилителей, в результате чего их индуктивное сопротивление уменьшается, в итоге растет выпрямленное напряжение , компенсирующее снижение скорости вращения под влиянием увеличения нагрузки. Нарастание напряжения прекращает рост тока в обмотке и система приходит в равновесие до следующего возмущения.
|
|
|
Цепи обмотки возбуждения электродвигателя, обмотки смещения и обмотки управления ( ) питаются от общего выпрямителя 2В, через трансформатор напряжения Т.
) питаются от общего выпрямителя 2В, через трансформатор напряжения Т.
На выходе выпрямителя, в качестве фильтра включают конденсатор С или дроссель.
Рис. 6.10. Блок схема привода с магнитным усилителем
Скорость вращения двигателя задается положением движка потенциометра Р (задатчика регулятора скорости),включенного последовательно с ограничительными «наладочными» сопротивлениями R 1 и R 2. Сопротивлением R 1 задается минимальная скорость вращения, R 2 - максимальная. Сопротивлением R 3 устанавливается напряжение возбуждения, сопротивлением R 4 – ток смещения магнитного усилителя, сопротивлением R 5 выбирается коэффициент усиления цепи положительной обратной связи (по току).
Блок-схема исследуемого МУ представлено на рис. 10. Здесь приняты следующие обозначения:
П - потенциометр задания скорости
с передаточной функцией W 1(p)
Σ - сумматор W 2(p) W 3(P)
ОС - обмотка смещения МУ W 7(p)
ОУ - обмотка управления МУ W 4(p)
 ОР - обмотка рабочая МУ W 5(p)
ОР - обмотка рабочая МУ W 5(p)
 Тр - трансформатор
Тр - трансформатор
Трт - трансформатор
В - выпрямитель
ИД - исполнительный двигатель W 6(p)
Структурная схема МУ представлена на рис. 6.11, на котором кроме обозначенных выше передаточных функций звеньев показаны цепи обратных связей по напряжению двигателя и току с передаточными функциями:  ,
,  .
.
Рис. 6.11. Структурная схема привода с магнитным усилителем
Передаточные функции составных частей привода имеют следующий вид:
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
Передаточная функция прямого тракта записывается
 ,
,
где  - передаточная функция цепи рабочих обмоток с учетом внутренней положительной обратной связи по току.
- передаточная функция цепи рабочих обмоток с учетом внутренней положительной обратной связи по току.
|
|
|
Положим для простоты, что  и действие этой связи аналогично ОС2, Принимая ее отрицательной (на самом деле здесь имеет место функциональная зависимость, т.к.
и действие этой связи аналогично ОС2, Принимая ее отрицательной (на самом деле здесь имеет место функциональная зависимость, т.к.  , для передаточной функции системы с учетом обратных связей получим
, для передаточной функции системы с учетом обратных связей получим
 ,
,
где  ,
,
 ,
,
 .
.
В установившемся режиме при  передаточная функция системы принимает вид
передаточная функция системы принимает вид
 .
.
Тумблеры T1 - T4 изображенные на структурной схеме рис. 6.11 –располагаются на лицевой панели на стенде.
Вывод: В результате работы изучены конструкции и принципы действия устройств электроавтоматики, построенных на базе магнитных усилителей, экспериментальное исследование электроприводов с магнитными усилителями (МУ) на примере привода серии ПМУ.
|
|
|
