 |


Моделирование систем управления
|
|
|
|
Моделирование систем управления - это эффективный инструмент исследования сложных систем.
Модель представляет собой изображение оригинала на основе принятых гипотез и аналогий, а моделирование - представление объекта моделью для получения информации об этом объекте путем проведения экспериментов с его моделью.
Основное требование, которому должна удовлетворять модель, является ее адекватность объекту. Адекватность зависит от цели моделирования и принятых критериев. Модель адекватна объекту, если результаты моделирования подтверждаются на практике и могут служить основой для прогнозирования процессов, протекающих в исследуемых объектах.
Моделирование решает задачи изучения и исследования объектов, предсказания их функционирования, синтеза структуры, параметров и алгоритмов поведения.
Модели бывают математические и физические. Физические модели сохраняют физические свойства объекта, а математические модели представляют собой математические конструкции. В основе математического моделирования лежит подобие дифференциальных уравнений, которыми описываются процессы, происходящие в реальной системе и в модели. В настоящее время универсальным инструментом реализации математических моделей является ЭВМ. Цифровое моделирование систем управления основывается на численном решении уравнений, описывающих систему.
Рассмотрим систему с одним входом g(t) и одним выходом y(t). Передаточная функция замкнутой системы в общем случае имеет вид
 , (6.31)
, (6.31)
где n - порядок системы.
Если порядок числителя передаточной функции (6.31) окажется меньше порядка знаменателя, т.е. m<n, то b0,..., bn-(m+1)=0.
Передаточной функции замкнутой системы соответствует дифференциальное уравнение
|
|
|
(a0pn+ a1pn-1+...+ an)y(t) = (b0pn+ b1pn-1+...+ bn)g(t). (6.32)
Для получения обобщенной модели системы это уравнение разрешают относительно старшей производной выходной величины:
pny(t) =  [ -(a1pn-1+...+ an)y(t)+(b0pn+ b1pn-1+...+ bn)g(t)] (6.33)
[ -(a1pn-1+...+ an)y(t)+(b0pn+ b1pn-1+...+ bn)g(t)] (6.33)
или
 . (6.34)
. (6.34)
Таким образом, чтобы найти выходную величину y(t) необходимо pny(t) проинтегрировать n раз.
Уравнению (6.34) соответствует структурная схема модели, представленная на рис.6.8.
Для программной реализации полученной схемы решения исходного дифференциального уравнения (6.32) последнее переписывают в форме Коши. Для этого вводятся промежуточные переменные x1,..., xn, соответствующие выходным величинам интеграторов. В результате получим следующую систему уравнений:
 (6.35)
(6.35)
и уравнение связи
y(t) = x1 + b0g(t). (6.36)
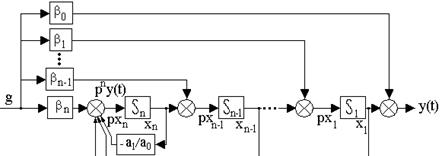
 Рис. 6.8. Структурная схема модели системы
Рис. 6.8. Структурная схема модели системы
Коэффициенты bi (где i=0, 1, 2,..., n) определяются из условия эквивалентности системы уравнений (6.35), (6.36) исходному дифференциальному уравнению (6.32) и вычисляются последовательно следующим образом:

 . (6.37)
. (6.37)
В настоящее время разработано большое количество систем моделирования, например, Continuous System Simulation Environment (CSSE).
ВОПРОСЫ К РАЗДЕЛУ 6
1. Дайте понятие качества работы системы управления. Чем оно определяется?
2. Что представляют собой критерии качества?
3. Как производится оценка точности работы систем?
4. Чему равны первые два коэффициента ошибок в системах с астатизмом первого и второго порядков?
5. Определите показатели качества переходного процесса и частотные показатели, поясните их физический смысл.
6. Поясните связь частотных показателей качества работы системы с частотными характеристиками разомкнутой цепи.
7. Что представляют собой корневые оценки качества?
8. В чем удобство и недостатки интегральных критериев качества?
9. Каким образом экспериментальным путем можно оценить качество работы системы?
|
|
|
10.Какова роль моделирования систем управления?
Содержание Глоссарий
|
|
|
