 |


Функциональная структура САР
|
|
|
|
Функциональная структурная схема системы автоматического регулирования с одной регулируемой величиной  представлена на рис. 14.
представлена на рис. 14.
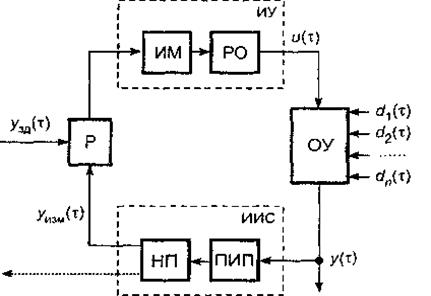
Рис. 11. Функциональная схема САР:
ОУ — объект управления; ПИП — первичный измерительный преобразователь; НП — нормирующий преобразователь; ИИС — информационно-измерительная система; Р — регулятор; ИУ — исполнительное устройство; ИМ — исполнительный механизм; РО — регулирующий орган
Система состоит из объекта управления (ОУ) и управляющего устройства, к которому можно отнести измерительное устройство (или информационно-измерительную систему, ИИС), автоматический регулятор и исполнительное устройство. В химической технологии ОУ может быть, например, реактор, в котором управляющее устройство должно поддерживать заданный технологический режим.
Рассмотрим подробно функциональные элементы, входящие в управляющее устройство.
Первичный измерительный преобразователь (ПИП — чувствительный элемент, сенсор) предназначен для преобразования регулируемого параметра в сигнал измерительной информации в форме, удобной для обработки и дальнейших преобразований. Например, термоэлектрический преобразователь, представляющий собой спай двух разнородных проводников, преобразует температуру в термоэлектродвижущую силу (ТЭДС).
Нормирующий преобразователь (НП) служит для взаимного согласования входящих в систему управления элементов и дистанционной передачи сигналов по каналам связи. Он осуществляет преобразование сигнала, полученного от ПИП, в эквивалентный ему унифицированный сигнал. Возможно преобразование сигнала одной физической природы в унифицированный сигнал той же самой физической природы (например, преобразование ТЭДС в унифицированный токовый сигнал от 0 мА до 5 мА) или в унифицированный сигнал другой физической природы (например, преобразование ТЭДС в унифицированный пневматический сигнал от 20 кПа до 100 кПа). Полученный унифицированный сигнал соответствует текущему значению регулируемого параметра и может передаваться не только к регулятору, но и к вторичному измерительному прибору или на системы более высокого уровня иерархии.
|
|
|
ПИП и НП являются элементами информационно-измерительной системы (ИИС).
Сигнал, соответствующий заданному значению регулируемого параметра  формируется задающим устройством (на рис. 14 не изображено). Величина задающего воздействия может быть постоянной или изменяться по определенному закону.
формируется задающим устройством (на рис. 14 не изображено). Величина задающего воздействия может быть постоянной или изменяться по определенному закону.
В некоторых случаях задающее устройство конструктивно объединено с регулятором.
Регулятор (Р) с помощью элемента сравнения определяет отклонение текущего значения регулируемого параметра от заданного значения и формирует командный сигнал в соответствии с заложенным в нем алгоритмом регулирования. Сигнал, формируемый регулятором, по мощности не всегда достаточен, чтобы управлять ИУ, поэтому регулятор часто снабжается усилителем мощности.
Устройство автоматической системы управления, воздействующее на технологический процесс в соответствии с полученным от регулятора командным сигналом, называется исполнительным устройством (ИУ). Как правило, в нем можно выделить два функциональных элемента: регулирующий орган и исполнительный механизм.
Исполнительный механизм (ИМ) предназначен для усиления мощности командного сигнала, получаемого от регулятора, и воздействия на регулирующий орган (РО).
Регулирующий орган (РО) — техническое средство изменения материального или энергетического потока, влияющего на регулируемую величину в ОУ. Это устройство, непосредственно воздействующее на ОУ для поддержания заданного значения регулируемой величины или изменения ее по заданному закону.
|
|
|
При исследовании динамических свойств системы регулирования по каналу задающего воздействия (вход — задающее воздействие , выход — регулируемая величина , возмущающее воздействие отсутствует или является постоянной величиной), систему автоматического управления удобно изображать упрощенной структурной схемой, представленной на рис. 12.
При исследовании динамических свойств системы регулирования по каналу возмущающего воздействия (вход — возмущающее воздействие  , выход — регулируемая величина , задающее воздействие является постоянной величиной) САР обычно изображают упрощенной структурной схемой, представленной на рис. 16.
, выход — регулируемая величина , задающее воздействие является постоянной величиной) САР обычно изображают упрощенной структурной схемой, представленной на рис. 16.
Для повышения устойчивости и улучшения динамических свойств системы управления в нее вводят корректирующие устройства. В зависимости от способов подключения корректирующие устройства делятся на последовательные и параллельные. С помощью последовательных корректирующих устройств происходит преобразование сигнала ошибки, и в управляющее воздействие вводятся составляющие, пропорциональные производной и интегралу от ошибки по времени. Параллельные корректирующие устройства (местные дополнительные обратные связи) подают сигнал с выхода элемента на вход одного из предыдущих. Функции корректирующих устройств могут выполнять компьютеры.
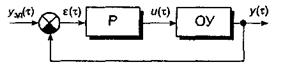
Рис. 12. Структурная схема САР по каналу задающего воздействия
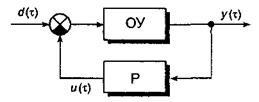 Рис. 13. Структурная схема САР по каналу возмущающего воздействия
Рис. 13. Структурная схема САР по каналу возмущающего воздействия
ЛЕКЦИЯ 5.
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ ТСА В СХЕМАХ.
Обозначение измеряемых (регулируемых) величин
Изображение ТСА на схемах технологических процессов производится в соответствии с ГОСТ 21.404-85 «Система проектной документации для строительства. Автоматизация технологических процессов. Обозначения условные приборов и средств автоматизации в схемах». Условные обозначения ТСА, применяемые в схемах, включают графические, буквенные и цифровые обозначения. В верхней части графического обозначения наносят буквенные обозначения измеряемой величины и функционального признаков ТСА, определяющего его назначение. В нижней части графического обозначения наносят цифровое (позиционное) обозначение ТСА, первая цифра которого соответствует № локальной схемы, вторая - № ТСА в данной локальной схеме. Отборное устройство для всех ТСА изображают сплошной тонкой линией, соединяющей технологический трубопровод или аппарат с ТСА. Толщина линий, используемых в графических условных обозначениях на схемах, составляет:
|
|
|
технические средства автоматизации - 0,6 мм; контуры технологического оборудования и трубопроводные коммуникации 1,5 мм. При необходимости указания конкретного места расположения отборного устройства (например, внутри технологического аппарата) его обозначают кружком ø = 2 мм.
Ниже рассмотрен принцип построения условного обозначения ТСА в соответствии с ГОСТ 21.404-85.

 Порядок расположения букв в буквенном обозначении ТСА принимают следующим:
Порядок расположения букв в буквенном обозначении ТСА принимают следующим:
 - основное обозначение измеряемой (регулируемой) величины;
- основное обозначение измеряемой (регулируемой) величины;
 - дополнительное обозначение измеряемой величины (при необходимости);
- дополнительное обозначение измеряемой величины (при необходимости);
 обозначение функциональных признаков ТСА.
обозначение функциональных признаков ТСА.
Порядок расположения буквенных обозначений функциональных признаков ТСА принимают с соблюдением следующей обязательной последовательности обозначений: I, R, C, S, A.
*Итак, буквой  обозначают измеряемую (регулируемую) величину:
обозначают измеряемую (регулируемую) величину:
Таблицы 1;2
| D | Плотность |
| E | Электрическая величина |
| F | Расход |
| G | Размер, положение, перемещение |
| H | Ручное воздействие |
| K | Время, временная программа |
| L | Уровень |
| M | Влажность |
| P | Давление, вакуум |
| Q | Величина, характеризующая качество: состав, концентрация и т.п. |
| R | Радиоактивность |
| S | Скорость, частота |
| T | Температура |
| U | Несколько разнородных измеряемых величин |
| V | Вязкость |
| W | Масса |
Понимание происхождения символов облегчает задачу их запоминания. С целью унификации с международным стандартом ANSI ISA-S5.1-1984(R1992) первая буква символа, как правило, это первая буква английского слова, обозначающего параметр или соответствующую функцию (см. Таблицу 2):
· На месте буквы  могут быть:
могут быть:
|
|
|
Таблица 3
| Q | Интегрирование, суммирование по времени |
| J | Автоматическое переключение, обегание |
| F | Соотношение, доля, дробь |
| D | Разность, перепад |
*  функциональные признаки ТСА (в строгом нижеследующем порядке):
функциональные признаки ТСА (в строгом нижеследующем порядке):
Таблица 4
При построении буквенных обозначений указывают не все функциональные признаки прибора, а лишь те, которые используют в данной схеме. Букву S применяют для обозначения контактного устройства прибора, используемого только для включения, отключения, переключения, блокировки.
Таблица 5
Дополнительные буквенные обозначения функциональных признаков ТСА.
| Обозначение | Наименование | Назначение | |
| E | Чувствительный элемент | Устройства, выполняющие первичное преобразование: преобразователи термоэлектрические, термопреобразователи сопротивления, датчики пирометров, сужающие устройства расходомеров и т. п. | |
| T | Дистанционная передача | ТСА с дистанционной передачей сигнала: манометры, дифманометры, манометрические термометры. | |
| K | Станция управления | ТСА, имеющие переключатель для выбора вида управления и устройство для дистанционного управления. | |
| Y | Преобразование, вычислительные функции | Для построения обозначений преобразователей сигналов и вычислительных устройств. |
Таблица 6
Буквенные обозначения для построения преобразователей
сигналов, вычислительных устройств
Таблица 7

Примеры обозначений
Некоторые характерные примеры обозначений средств ТСА на чертежах приведены ниже в таблице.
Таблица 8
| Обозначение | Наименование | ||||||

| Первичный измерительный преобразователь температуры (термоэлектрический преобрзователь (термопара)), термо преобразователь сопротивления). | ||||||
| Выходной преобразователь. Y - преобразование сигнала: Е/Е - не унифицированный электрический сигнал преобразуется в унифицированный электрический сигнал; Е/Р - унифицированный электросигнал преобразуется в унифицированный пневматический сигнал (электропневмопреобразователь); Р/Е - унифицированный пневмосигнал преобразуется в унифицированный электрический сигнал. (пневмоэлектропреобразователь). | ||||||

| Прибор для измерения температуры показывающий, установленный по месту (термометр ртутный, термометр манометрический и т. п). милливольтметр, логометр, потенциометр, мост автоматический и т. п.). | ||||||
 
| Прибор для измерения температуры бесшкальный с дистанционной передачей показаний (электрического сигнала), установленный по месту (термометр манометрический или любой другой датчик температуры) | ||||||

| Прибор для измерения давления (разрежения) показывающий, установленный по месту (показывающий манометр, дифманометр, тягомер, напоромер, вакуумметр и т. п). | ||||||

| Прибор для измерения перепада давления, установленный по месту (дифманометр показывающий). | ||||||

| Первичный измерительный преобразователь для измерения расхода, установленный по месту (диафрагма, сопло Вентури датчик индукционного расходомера и т.д.). | ||||||

| Прибор для измерения расхода показывающий, установленный по месту (дифманометр или ротаметр показывающий и т.д.). | ||||||

| Прибор для измерения расхода с дистанционной передачей информации? Показывающий (массовый расходомер, вихревой расходомер) | ||||||

| Прибор для измерения соотношения расходов регистрирующий, установленный на щите. (вторичный прибор для регистрации соотношения расходов). | ||||||

| Прибор для измерения уровня бесшкальный, с дистанционной передачей показаний, установленный по месту (уровнемер бесшкальный с пневмопередачей (электропередачей)). | ||||||
| Прибор для измерения плотности раствора бесшкальный, с дистанционной передачей показаний, установленный по месту. (датчик плотномера с электропередачей). | ||||||
| Прибор для измерения качества продукта показывающий, регистрирующий, установленный на щите (вторичный самопишущий прибор контроля концентрации серной кислоты в растворе).. | ||||||

Лекция 6.
|
|
|
