 |


1.4.2. Автоматизация процессов работы бульдозеров
|
|
|
|
1. 4. 2. Автоматизация процессов работы бульдозеров
Большое значение для повышения производительности при планировочных работах имеет автоматическое управление отвалом бульдозера.
Анализ работы бульдозеров на планировочных операциях земляной поверхности под заданную отметку показал, что наиболее трудоемкими операциями для бульдозериста являются управление высотным положением отвала, движением машины по курсу и выглублением отвала при перегрузке двигателя. Исходя из этого, с учетом назначения и характера рабочего процесса, а также операций по производству работ, отделом автоматики Московского НПО ВНИИстройдормаш были разработаны системы автоматизации для бульдозеров «Автоплан-10», «Копир-Автоплан-10» и «Комбиплан-10ЛП».
Применение аппаратуры на планировочных работах повышает производительность труда благодаря сокращению числа проходов по одному месту, улучшает качество спланированной поверхности, снижает утомляемость и улучшает условия работы машиниста [3].
Система «Автоплан-10» предназначена для автоматической стабилизации положения отвала бульдозера с гидравлическим управлением рабочего органа.
Аппаратура системы обеспечивает:
автоматическую стабилизацию углового положения толкающей рамы отвала относительно горизонтальной плоскости в диапазоне ± 30°;
дистанционное (кнопочное) изменение заданного угла толкающей рамы отвала в диапазоне ± 5°.
В состав аппаратуры «Автоплан-10» (рис. 3. 9) входят: блок управления 1, пульт управления 2, датчик углового положения 3, исполнительное устройство – электрогидравлический золотник 4 типа ЗСУ-5. Питание системы осуществляется от бортового аккумулятора 5.
|
|
|
Установка задания производится задатчиком на блоке управления; ручное управление (кнопочное) – с пульта управления.

Рис. 1. 9. Аппаратура системы «Автоплан-10» (а) и ее расположение на бульдозере (б)
Автономно-комбинированная система «Копир-Автоплан-10» предназначена для автоматического (автономного и копирного по лучу лазера) управления положением отвала бульдозера в продольной плоскости, стабилизации высотного положения отвала по лазерным направляющим, а также для защиты двигателя от перегрузок.
В состав аппаратуры «Копир-Автоплан-10» (рис. 1. 10) входят: источник лазерного излучения 1, фотоприемное устройство ФПУ 2, механизм перемещения МП с датчиком обратной связи 3, тахогенератор 4, датчик ДКБ 5, пульт управления 6, аккумулятор 7, гидрозолотники 8.

Рис. 1. 10. Аппаратура системы «Копир-Автоплан-10»
Система «Комбиплан-10ЛП» включает в себя следующие функциональные схемы:
- систему стабилизации отвала бульдозера в продольной плоскости;
- систему стабилизации высотного положения отвала бульдозера по лазерным направляющим;
- систему защиты двигателя от перегрузок;
- систему стабилизации отвала бульдозера в поперечной плоскости.
Автоматическая стабилизация положения отвала в продольной плоскости обеспечивается либо автономной системой управления, чувствительным элементом которой является датчик углового положения ДКБ, либо копирной системой, в которой опорной (задающей) плоскостью является луч лазера, а чувствительным элементом – фотоприемное устройство ФПУ.
Одновременно со стабилизацией отвала создается автоматическая защита двигателя от перегрузки. Чувствительным элементом этой защиты является датчик частоты вращения ТГ.
Автоматическая стабилизация отвала в поперечной плоскости обеспечивается автономной системой, чувствительным элементом которой является датчик перекоса ДП.
|
|
|
Вопросы, связанные с повышением производительности бульдозера и выбором эффективных схем резанья грунта в процессе рабочего цикла, освещены в [1, 4, 6].
1. 5. Схемы движения скреперов
Производительность скреперных работ, их стоимость и качество во многом определяются выбранными схемами движения. При выборе в проекте производства работ схем движения скреперов учитываются следующие основные требования [1, 5]:
- путь движения скреперов должен быть кратчайшим и с наименьшим числом крутых поворотов;
- левые и правые повороты желательно чередовать, что способствует равномерному износу ходовых частей скрепера;
- фронт работы в выемке и на насыпи должен быть достаточным для полной загрузки и последующей разгрузки скрепера;
- должны быть максимально снижены подъемы в грузовом и порожнем направлениях.
Многолетней практикой установлены следующие рациональные схемы движения скреперов: эллиптическая, спиральная, по «восьмерке», по зигзагу, челночно-поперечная и челночно-продольная.
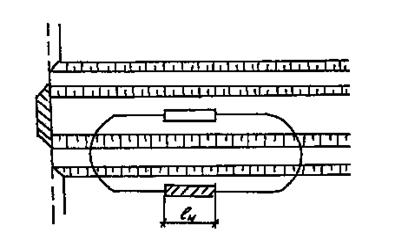
Рис. 1. 11. Эллиптическая схема движения
Эллиптическая схема (рис. 1. 11) является наиболее простой. Она применима во всех случаях возведения насыпей из односторонних или двухсторонних резервов, а так же при устройстве выемок с укладкой грунта в дамбы, насыпи или кавальеры и при планировочных работах в промышленном и гражданском строительстве. Особенно целесообразна данная схема, когда при поперечном перемещении грунта рабочие отметки незначительны, и устройства выездов или съездов не требуются, а так же при продольной возке грунта из выемки в смежную насыпь.
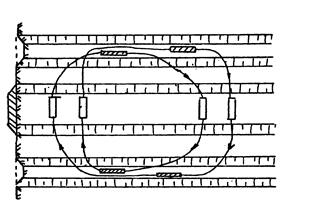
Рис. 1. 12. Спиральная схема движения
Спиральная схема (рис. 1. 12) – разновидность эллиптической, применима при возведении широких насыпей из двухсторонних резервов или широких выемок глубиной до 2, 5 м, так как выполняется без устройства выездов и съездов. Спиральная схема по сравнению с эллиптической увеличивает производительность, так как при отсыпке грунта перпендикулярно к оси возводимого сооружения сокращается дальность его транспортирования.
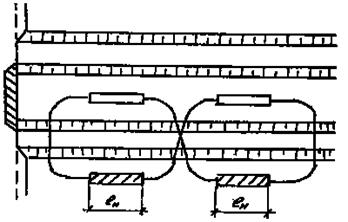
Рис. 1. 13. Схема движения по «восьмерке»
Схема движения по «восьмерке» (рис. 1. 13) применима при тех же условиях, что и эллиптическая. В данной схеме левые и правые повороты чередуются, что позволяет получить равномерный износ ходовых частей скрепера и вдвое сократить время на повороты. Производительность скреперов при движении по «восьмерке» на 3…5 % выше, чем при движении по эллипсу.
|
|
|
Схему движения скрепера по зигзагу (рис. 1. 14) применяют при возведении насыпей высотой до 6 м из резервов при длине захватки 200 м и более. При работе скрепера по этой схеме уменьшается число поворотов и дальность возки грунта, вследствие чего производительность скрепера возрастает до 15 % по сравнению с эллиптической схемой движения.
Рис. 1. 14. Схема движения по зигзагу
Челночно-поперечная схема (рис. 1. 15) применяется при возведении насыпей и дамб высотой менее 1, 5 м при работе из двухсторонних резервов, или при устройстве выемок глубиной до 1, 5 м с укладкой грунта в кавальеры. Движение скреперов при челночно-поперечной схеме аналогично эллиптической схеме. Набор грунта производится перпендикулярно к оси выемки или резерва, ширина которых должна обеспечивать заполнение ковша скрепера. По сравнению с эллиптической схемой производительность скрепера при данной схеме движения возрастает на 20…25 %.
Рис. 1. 15. Челночно-поперечная схема движения
Челночно-продольная схема движения скреперов (рис. 1. 16) применяется при возведении насыпей высотой до 5…6 м с заложением откосов не круче 1: 2, с транспортировкой грунта из двухсторонних резервов. При движении по этой схеме холостой пробег скрепера сокращается до минимума.
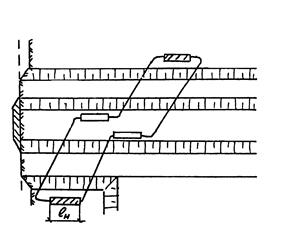
Рис. 3. 16. Челночно-продольная схема движения
При вертикальной планировке площадей применяют эллиптическую, спиральную и челночно-поперечную схемы движения скреперов.
Сведения, касающиеся выбора рациональных схем резания грунта при работе скрепера и производства тяговых расчетов, подробно изложены в [1, 6].
|
|
|
