 |


Кинематический анализ механизма
|
|
|
|
ЗАДАНИЕ НА КУРСОВОЕ ПРОЕКТИРОВАНИЕ
По заданным геометрическим, весовым и эксплуатационным параметрам разработать привод пресс-автомата с плавающим ползуном - одноступенчатый конический редуктор.
С этой целью выполнить синтез рычажного механизма и его кинематический анализ, по результатам которого определить функцию изменения момента движущих сил с учётом коэффициента полезного действия механизма в течение одного технологического цикла. Результаты кинематического и силового анализа отразить на плакатах.
На основе полученной характеристики наружности привода подобрать соответствующий редуктор, найти основные параметры зубчатого зацепления и произвести проверочный расчет последнего на прочность по критериям контактной выносливости и усталости при переменном изгибе.
Спроектировать тихоходный вал редуктора. Исходя из проектировочного расчета на прочность, определить основные параметры шпоночного и шлицевого соединения колеса с валом. Выполнить проверочный расчет последнего на усталостную прочность с учетом конструктивных и технологических факторов, а также формы циклов нормального и касательного напряжений.
Выполнить проверочный расчет выбранных подшипников качения на долговечность. По указанию преподавателя выполнить расчет одной из деталей механизма, подобрать муфту, соединяющую ось кривошипа с тихоходным валом редуктора, и произвести расчет на прочность ее основных элементов.
По результатам проектирования выполнить сборочный чертеж редуктора и рабочий чертеж одной из его деталей.
СОДЕРЖАНИЕ
Расчетно-пояснительной записки к курсовому проекту на тему
“ПРОЕКТИРОВАНИЕ ПРИВОДА ПРЕСС-АВТОМАТА
|
|
|
С ПЛАВАЮЩИМ ПОЛЗУНОМ“
Реферат
Задание на курсовое проектирование
Описание устройства и работы механизма
Кинематический анализ механизма
Синтез плоского рычажного механизма
Определение кинематических передаточных функций
Силовой анализ механизма
Определение момента м ст(j) для преодоления сил статического сопротивления
Определение момента м дин(j) для преодоления сил динамического сопротивления
Расчет КПД механизма
Расчет движущего момента м S(j)
Выбор редуктора
Определение усилий в зубчатом зацеплении
Расчет тихоходного вала на прочность
Формирование расчетной схемы вала
Расчет вала на статическую прочность
Проектировочный расчет шпоночного соединения
Расчет вала на выносливость
Проверочный расчет зубчатой пары на прочность
Определение ресурса передачи
Расчёт поверхности зуба колеса на прочность по контактным напряжениям
Расчёт зубьев на прочность при переменном изгибе
Заключение
Список использованных источников
Рисунок 1. Кинематическая схема пресс-автомата:
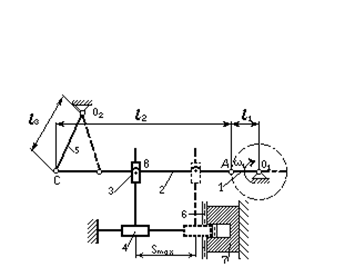
1- кривошип;
2- шатун;
3- ползун;
4- пуансон;
5- кулиса;
6- лента;
7- матрица.
ОПИСАНИЕ УСТРОЙСТВА И РАБОТЫ МЕХАНИЗМА
Пресс-автомат предназначен для обработки деталей давлением. Технологический цикл механизма начинается в положении 1 (рисунок 1), в этот момент времени пуансон в крайнем левом положении. Совершая вращательное движение по часовой стрелке кривошип 1 приводит в движение через цилиндрический шарнир А шатун 2, который через цилиндрический шарнир С закреплен на, совершающей возвратно-вращательное движение, кулисе 5. Кулиса 5 закреплена на не подвижном цилиндрическом шарнире. Шатун 2 через шарнир В приводит в движение ползун, который движется по эллиптической траектории. Ползун передает усилие на штангу, приводящую в движение пуансон 4, который совершает возвратно-поступательное движение и, входя в матрицу 7, штампует, подаваемую между ними, ленту 6.
|
|
|
В положении n1 когда пуансон прошел 40% от пути, он соприкасается с лентой сила сопротивления равна 0. Далее на интервале [0,4;0,8] S max сила сопротивления возрастает по линейному закону F=S/0,4-1 после чего скачкообразно приобретает значение нуля, которое остается неизменным до конца максимального перемещения S max =100 мм. Последний этап необходим для полной продавливаемости ленты. Затем пуансон возвращается в свое первоначальное положение, (механизм работает в режиме холостого хода).
КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
Траектория движения, перемещения, скорость звеньев и характерных точек являются кинематическими характеристиками механизма. Для решения задачи определения кинематических характеристик можно воспользоваться графоаналитическим методом. Суть данного метода заключается в построении ряда положений звеньев механизма и соответствующих им планов скоростей. После проведенного синтеза, механизм изобразим в двенадцати положениях в масштабе 0,006 м/мм. Каждое положение отличается от предыдущего на угол поворота равный p/6 радиан. В каждом из положений определим линейные скорости кинематических пар, центров тяжести весомых звеньев, а также угловые скорости последних. Угловая скорость кривошипа ω1 постоянна и в последующих расчётах для удобства примем её равной единице, т.о. все получаемые скорости будут смасштабированны ω1 в раз.
|
|
|
