 |


Глава X. Радиолокационные системы с активным ответом
|
|
|
|
ОБЩАЯ ХАРАКТЕРИСТИКА
При плавании вблизи берегов в условиях ограниченной видимости часто возникает необходимость определения места судна по береговым ориентирам, знакам навигационного ограждения, буям. Слаборазличимы также сигналы от малых судов, яхт, шлюпок и т. п. Использование искусственных радиолокационных отражателей для улучшения их наблюдаемости становится малоэффективным на фоне засветок от морской поверхности, береговой черты и др. Увеличение ЭПР отражателями ограничивается их габаритными размерами, массой, парусностью, что затрудняет их установку на малых объектах. Кроме того, опознавание объекта по эхо-сигналу, воспроизводимому на экране ИКО РЛС, затруднено, а иногда и невозможно.
Эффективно решать задачи выделения сигналов на фоне помех и опознавания объектов по отметкам на экране ИКО позволяют радиолокационные устройства с активным ответом, образующие совместно с РЛС систему вторичной радиолокации (СВРЛ). Это устройство, получившее название «ответчик», излучает ответные сигналы только после приема запросных сигналов судовой РЛС. Для повышения помехоустойчивости системы запросные сигналы излучаются еще и специальными запросчиками.
Активный ответ позволяет значительно увеличить дальность радиолокационного наблюдения объектов с малой ЭПР, так как мощность сигналов запроса и ответа убывает пропорционально квадрату расстояния до объекта, а не четвертой степени, как это имеет место при приеме отраженных (пассивных) сигналов. Отсутствие флюктуаций ответного сигнала повышает также точность определения координат объектов, снабженных ответчиком. Кодирование ответа позволяет осуществлять обмен информацией между судами, а также значительно облегчить выделение полезных сигналов на фоне помех.
|
|
|
Дальность обнаружения сигналов ответчика в свободном пространстве определяется из условия приема запросных и ответных сигналов. Максимальная дальность приема запросного сигнала
где индексами з и о обозначены соответственно характеристики запросчика и ответчика; Ри з — импульсная мощность передатчика запросчика; G3—КНД антенны запросчика; G0 — коэффициент направленного действия антенны ответчика; Pnp.ofmin) — чувствительность приемника ответчика; Р„.0 — импульсная мощность передатчика ответчика.
При расстоянии D^>Dmax3 сигналы запросчика не смогут «запустить» ответчик, а при D>Dmaxо ответный сигнал не будет обнаружен.
С энергетической точки зрения оптимальной будет СВРЛ, в которой выполняется условие

или после подстановки значений максимальных дальностей

Это уравнение позволяет выбрать мощность передатчика и чувствительность приемника ответчика при заданных характеристиках запросчика (судовой РЛС). Если условие (X—3) не выполняется, то максимальная дальность действия СВРЛ определяется по наименьшему из получаемых по формулам (X—1) и (X—2) значению.
В реальных условиях дальность наблюдения ответных сигналов СВРЛ будет зависеть не только от технических характеристик запросчика и ответчика, но и от условий распространения радиоволн: высот установки антенн, состояния морской поверхности, метеоусловий и других факторов.
Влияние подстилающей (морской) поверхности на дальность действия СВРЛ проявляется в том, что напряженность поля в точке приема равна векторной сумме прямого сигнала и отраженного от морской поверхности. Самым неблагоприятным является случай противофазности этих сигналов. Наблюдаемое при этом интерференционное замирание может привести к потере запросных (или ответных) сигналов на расстояниях Da (рис. 46), меньших, чем это определяется уравнениями (X—1) и (X—2). Глубина замираний определяется отношением отраженного сигнала к прямому. Послед-
|
|
|
|
Рис. 46. Зависимость уровня сигнала на входе приемника от расстояния (в логарифмическом масштабе): 1 — в свободном пространстве; 2 — с учетом интерференции; 3 — срез, обусловленный сферичностью земной поверхности |

нее зависит от состояния морской поверхности, длины волны излучения, поляризации и угла падения электромагнитной волны. Наиболее сильно замирание проявляется в штиль.
Распределение «провалов» по дальности зависит от высоты установки антенн и длины волны излучения. Кроме того (см. рис. 46) г уровень сигнала резко падает на дальности, превышающей прямую радиолокационную видимость DP.B.
По характеру решаемых задач и области применения СВРЛ можно выделить следующие системы: навигационного обеспечения; радиолокационного наблюдения; контроля за движением судов; предупреждения столкновений.
Характер решаемых задач определяет соответствующие требования к системе. СВРЛ, используемые в настоящее время, разделяются на радиолокационные маяки-ответчики (РМО) и судовые запросчики-ответчики (СЗО).
РМО, называемый также раконом представляет собой приемопередающее устройство, излучающее ответные сигналы (кодовое сочетание) при поступлении на вход приемника зондирующих импульсов судовых РЛС. Они предназначены для улучшения радиолокационной наблюдаемости и опознания объектов, обладающих малыми ЭПР, а также для обозначения «особых» точек.
СЗО в отличие от РМО излучает ответный кодированный сигнал лишь при приеме кодированного запроса от специального за- просчика. Функциональные возможности такой системы значительно шире. Помимо задач, решаемых РМО, СЗО позволяет осуществить обмен навигационной и другой информацией между судами или между судном и береговым центром управления движением.
§ 31. РАДИОЛОКАЦИОННЫЕ МАЯКИ-ОТВЕТЧИКИ
Назначение РМО предполагает их работу с любой судовой РЛС. Согласно требованиям Регистра СССР и Конвенции-60 по безопасности мореплавания все суда водоизмещением более 500 per. т должны быть оснащены РЛС трехсантиметрового диапазона волн. Для судовых РЛС в этом диапазоне Регламентом радиосвязи отведена полоса частот 9320—9500 МГц. Следовательно, приемник РМО должен иметь полосу пропускания, ширина которой Af=9500— —9320 МГц= 180 МГц.
|
|
|
Чувствительность его приемника выбирается таким образом, чтобы обеспечить необходимую дальность работы с любой РЛС и в то же время не допустить срабатывание РМО от помех. Ответные сигналы РМО принимаются только в том случае, если их несущая частота попадает в полосу пропускания приемника запрашивающей РЛС. Приемники каждой РЛС настраиваются на прием отраженных сигналов и имеют полосу пропускания 4—20 МГц. Для приема сигналов РМО необходимо, чтобы их частота в процессе излучения ответа изменялась в пределах возможной настройки приемника РЛС, т. е. от 9320 до 9500 МГц. Сигналы от РМО при этом будут видны на экране ИКО судовой РЛС вместе с сигналами, отраженными от пассивных объектов.
Изменение (качание) частоты ответного сигнала РМО может быть быстрым, когда полная перестройка осуществляется в течение каждого ответного импульса, и медленным, когда перестройка происходит за относительно длительный период (60—120 с). Последний метод нашел более широкое применение, так как позволяет точнее измерить дистанцию, а сигналы от таких РМО в меньшей степени «засоряют» экран ИКО. Ответные сигналы наблюдаются периодически: через каждые 15—30 оборотов антенны РЛС в течение 2—3 оборотов.
В зависимости от места установки РМО его антенная система может быть всенаправленной или секторной.
Первые опыты по созданию и использованию РМО были проведены еще в 50-х годах, но несовершенство элементной базы сдерживало их широкое применение. В 70-х годах в связи с бурным развитием полупроводниковой электроники интерес к этим системам вновь возрос. Ведущими в области радиолокационной техники фирмами были разработаны серии РМО для установки на береговых и плавучих объектах. Отечественной промышленностью в 60-х годах был освоен выпуск РМО типа «Огонек».
|
|
|

Позднее был разработан новый тип универсального РМО, выполненного полностью на полупроводниковых элементах.
Опыт эксплуатации РМО с качанием частоты позволил выявить недостатки такой системы:
слабую наблюдаемость ответных сигналов в условиях интенсивных помех от моря, гидрометеоров и окружающих объектов;
наличие секторных и круговых засветок на экране ИКО РЛС, «маскирующих» эхо-сигналы;
малую степень распознавания сигналов.
Массовое и бесконтрольное применение РМО могло привести к чрезмерному засорению радиолокационного изображения. Поэтому вопросы использования СВРЛ специально рассматривались Подкомитетом по безопасности мореплавания ИМО. В соответствии с рекомендациями ИМО Международная ассоциация маячных служб регламентировала технические характеристики (табл. 5) и область применения РМО с качанием частоты. Их применение ограничено навигационным обеспечением береговых и плавучих знаков, опасностей. В исключительных случаях разрешена их установка на суда, стесненные в маневрировании или перевозящие опасные грузы.
Все РМО разделены на три класса: большой дальности (до 25 миль); средней дальности (8—15 миль); малой дальности (до 6 миль).
РМО большой дальности предусматривается устанавливать на береговых навигационных знаках на высоте более 30 м над уровнем моря, средней дальности — на плавучих маяках, навигационных знаках или на береговых знаках на высоте менее 30 м над уровнем моря, малой дальности — на буях или знаках, ограждающих входы в порты, фарватеры.
Принцип работы РМО с качанием частоты поясняется схемой, приведенной на рис. 47.
Зондирующие импульсы судовой РЛС через всенаправленную приемную антенну А1 поступают на вход приемника, состоящего из видеодетектора БД и видеоусилителя ВУ. Усиленные сигналы с выхода приемника подаются на пороговое устройство ПУ. В случае превышения сигналом порогового уровня производится запуск кодирующего устройства КУ. В некоторых случаях между пороговым и кодирующим устройствами помещается схема анализа регулярности следования импульсов запроса, которая повышает помехоустойчивость ответчика. В КУ предусматривается возможность изменения кодовой комбинации импульсов, соответствующей буквам кода Морзе.
В соответствии с кодовой последовательностью запускается передатчик, состоящий из модулятора М и СВЧ-генератора перестраиваемой частоты Г. Далее ответные СВЧ-сигналы через всенаправленную антенну А2 излучаются в пространство и достигают запрашивающей РЛС. В современных РМО в качестве модулятора используются мощные транзисторы, а в качестве СВЧ-генератора широкое применение получили лавинопролетные диоды и диоды Ганна. Перестройка частоты осуществляется изменением емкости р—л-перехода варикапа, включенного в колебательный контур генератора.
|
|
|
Для приема запросных и излучения ответных сигналов может быть использована и одна антенна с применением антенного переключателя.
 ,
,
Необходимый режим качания частоты задается генератором пилообразного напряжения, работающим в автоколебательном режиме. Управление его работой осуществляется схемой принятия решения, которая по заранее заданному алгоритму включает РМО в активный режим или переключает в режим ожидания.
Контроль полосы излучаемых колебаний осуществляется с помощью двух резонаторов высокой добротности Р1 и Р2, настроенных на крайние частоты рабочего диапазона. Когда рабочая частота достигает частоты настройки одного из резонаторов, происходит изменение направления качания частоты СВЧ-генератора.
Схема блокировки СБ вырабатывает импульсы, запирающие приемник на время обработки запросного и излучения ответного сигналов. Тем самым предотвращаются самовозбуждение ответчика "и искажение ответного сигнала запросными импульсами других РЛС.
Изображение ответного сигнала на экране ИКО РЛС при неко- дированном ответе имеет вид, показанный на рис. 48. Поскольку ответный сигнал излучается с некоторой задержкой, обусловленной прохождением сигналов по цепям ответчика, он воспроизводится на расстоянии, большем фактического. Иногда для улучшения наблюдения ответного сигнала относительно отметок берега вводится дополнительная задержка. Время задержки указывается на картах и в лоциях для каждого РМО и учитывается при определении расстояний. Кроме того, указываются координаты ответчика,
код его ответного сигнала, минимально допустимое приближение к нему и другие параметры.
Недостатки РМО с качанием частоты связаны £ невозможностью освободиться от сигналов, когда надобность в них отпадает. Это устраняется при переходе на фиксированную частоту ответа, находящуюся вне полосы частот, отведенной для работы РЛС. Применение РМО с фиксированной частотой ответа (РМО-Ф) обеспечивает:
раздельное и совместное наблюдение радиолокационных эхо- сигналов и сигналов ответчика на экране ИКО;
раздельную и совместную обработку этих сигналов на ЭВМ;
высокую степень опознавания;
высокую защищенность ответных сигналов от помех на рабочей частоте РЛС.
Для работы РМО-Ф выделены полосы частот: в трехсантиметровом диапазоне волн 9300—9320 МГц; в десятисантиметровом — 2900—2920 МГц. Эти полосы находятся на краю диапазона частот, отведенного для судовых РЛС. Это сделано для того, чтобы при приеме сигналов РМО-Ф мог быть использованый тракт РЛС. Специальная приставка (дополнительный гетеродин) обеспечивает прохождение сигналов по приемному тракту РЛС. Для эксплуатирующихся РЛС такая модернизация не вызывает трудностей даже в судовых условиях, а в отечественных РЛС типа «Печора» и «Океан-С» прием сигналов РМО-Ф предусмотрен заводом-изготовителем.
В 1980 г. ИМО рекомендовано использование РМО-Ф для обозначения характерных точек пологих берегов, навигационных ограждений, подходов к портам, береговых объектов. Ответчики разделены на два типа:
А — ближнего действия (до 10 миль);
В — дальнего действия (10—30 миль).
Технические характеристики каждого из них регламентированы (табл. 6). Выбор типа запрашиваемого маяка осуществляется автоматически в зависимости от установленной на ИКО шкалы дальности. Это достигается селекцией зондирующих импульсов РЛС по длительности в приемнике РМО-Ф.
Структурная схема РМО-Ф и принцип работы незначительно отличаются от РМО с качанием частоты (см. рис. 47).
§ 32. СУДОВЫЕ ЗАПРОСЧИКИ-ОТВЕТЧИКИ
Несмотря на совершенствование методов обработки сигналов и широкое внедрение в РЛС цифровой техники, существует ряд задач, решение которых традиционными методами затруднено или невозможно. В первую очередь это относится к решению задач безопасного расхождения судов в море.
Оценка ситуации на основе обработки радиолокационной информации как вручную, так и средствами автоматической радиолокационной прокладки (САПР) основывается на предположении о неизменности параметров движения цели (курса и скорости) в течение интервала наблюдения. В условиях интенсивного движения, хогда судам приходится часто маневрировать, эффективность такого метода мала. Возникают ситуации неопределенности взаимно- то положения, возрастает опасность столкновения судов.

Маневрирующее судно всегда является объектом повышенной опасности, поскольку невозможно предсказать его действия. Заблаговременное оповещение всех судов о характере маневра позволило «бы прогнозировать ход событий и избегать опасных ситуаций. Для правильного выполнения требований МППСС-72 и согласования действий судоводителей полезной может оказаться информация о типе судна, его водоизмещении, особенностях груза и др. Использование для этой цели УКВ-радиотелефонной связи ограничено рядом факторов, наиболее ощутимо проявляющихся в районах интенсивного судоходства. Это, в частности: медленный темп передачи данных;
сложность в установлении соответствия передаваемого сообщения отметке на ИКО РЛС;
перекрытие и искажение сообщений; языковые трудности;
отвлечение судоводителей во время сеанса связи от наблюдения за окружающей обстановкой.
Эффективно решать задачу автоматического обмена информацией между судами при точном соответствии передаваемых сообщений отметкам на ИКО и высокой пропускной способности позво-.ляет судовая система вторичной радиолокации. Она включает аппаратуру СЗО и РЛС. Преимущества такой системы полностью могут быть реализованы только при установке СЗО на всех судах. А это требует единого принципа построения СЗО и регламентации их основных технических характеристик в международном масштабе. /
В 1979 г. ВАКР для работы СЗО были выделены полосы частот, расположенные за пределами отведенных для судовых РЛС и РМО:

Это сделано во избежание взаимных помех между одновременно работающими судовыми системами.
Использование для передачи запроса и приема ответных сигналов антенны и СВЧ-тракта судовой РЛС в данном случае затруднено, так как сопряжено с необходимостью значительной модернизации существующих РЛС. Помимо дополнительных затрат такая модернизация может привести к ухудшению характеристик РЛС.
Результаты исследований и опыт эксплуатации показали, что предпочтение следует отдать автономному СЗО, работающему независимо от РЛС и легко сопрягаемому с ними. В качестве запросного сигнала, кроме кодовой посылки СЗО, используется также зондирующий импульс РЛС, что позволяет существенно повысить помехоустойчивость системы в целом и осуществить азимутальную селекцию ответных сигналов.
В нашей стране уделяется большое внимание вопросам разработки и использования СЗО. В 1974 г. был создан СЗО «Волга», предназначенный для координации действий рыболовной флотилии с борта плавбазы «Восток». Опытная эксплуатация аппаратуры: дала положительные результаты, что явилось толчком для ее дальнейшего развития. С учетом перспективы использования СЗО на всех судах мирового флота в настоящее время разработан более совершенный СЗО, отвечающий международным требованиям и позволяющий вести двусторонний обмен информацией между судами.
На рис. 49 показан внешний вид основных блоков аппаратуры СЗО. В ее комплект входят приемопередающий блок с антенной 1, процессор 2 и дисплей 3 (последние могут быть совмещены). В режиме запроса работа СЗО синхронизируется запускающими импульсами РЛС. Для стробирования ответного сигнала по положению цели на экране ИКО в процессор дополнительно вводятся импульсные сигналы отметки курса и метки дальности. Стробирование позволяет улучшить разрешающую способность и увеличить помехоустойчивость системы. Вид запроса, т. е. характер запрашиваемой информации (опознавание, курс, скорость, маневр и др.), выбирается оператором на пульте управления 4. Информация, получаемая от ответчика, отображается на цифровом табло дисплея 5.


Для постоянного контроля на это же табло выводится информация о собственном судне 6. Значения курса и скорости своего судна вводятся в процессор автоматически от гирокомпаса и лага либо вручную через клавиатуру ввода информации 7. Оперативный контроль работоспособности СЗО осуществляется в режиме «Тест» органами управления 8. Приемопередающий блок с антенной устанавливается на мачте по возможности выше. СЗО сопрягается с любой судовой РЛС 3-сантиметрового диапазона волн. В табл. 7 приведены основные технико-эксплуатационные характеристики современного СЗО, отвечающего требованиям ИМО.

Работу СЗО рассмотрим по упрощенной структурной схеме, представленной на рис. 50. Большую часть времени СЗО работает в режиме ответа и только по желанию оператора переводится в режим запроса. На рис. 50 показано два идентичных СЗО, составляющих систему вторичной радиолокации, СЗО-1 работает в режиме запроса, СЗО-2—в режиме ответа.
Запрос осуществляется нажатием клавиши на пульте управления и индикации ПУИ, которая соответствует получению желаемого вида информации. При этом в кодирующем устройстве запроса КЗ формируется запросный сигнал, поступающий к передатчику 10- сантиметрового диапазона волн ПД-10. Далее модулированный СВЧ-сигнал через циркулятор Ц и всенаправленную антенну А1-10 излучается в пространство с некоторым упреждением относительно зондирующего импульса РЛС. Упреждение запросного сигнала необходимо для возможности его декодирования до срабатывания схемы совпадения СС в ответчике.
Ответчик СЗО-2 принимает через всенаправленные антенны Л2-10 и А2-3 высокочастотные сигналы запроса и зондирующий импульс РЛС. Прошедший через приемник 10-сантиметрового диапазона волн ПР-10 сигнал запроса декодируется в устройстве ДКЗ. Ответ, соответствующий формату запроса, вырабатывается только в том случае, если получен сигнал разрешения от приемника зондирующих импульсов РЛС ПР-3. Этим обеспечивается азимутальная селекция запрашиваемых ответчиков: запрос принимается только теми ответчиками, на которые направлена в данный момент антенна судовой РЛС. Запускаемое сигналом со схемы совпадения СС кодирующее устройство ответа КО формирует сигнал, который поступает на передатчик ПД-10 и через всенаправленную антенну А2-10 излучается в пространство.
Принятый антенной А1-10 ответный сигнал поступает к приемнику ПР-Ю, где усиливается, детектируется и подается на декодирующее устройство ДКО. После преобразования в ПУИ сигнал в цифровом виде Отображается на индикаторной панели дисплея. Дополнительно на экране ИКО РЛС отвечающая цель выделяется специальным маркером.
Получаемая от СЗО информация может непосредственно использоваться штурманом. Кроме того, информация о курсе и скорости запрашиваемого судна (Кц, Уц) может быть введена в САРП для оценки ситуации. Индивидуальное опознавание судов в случае необходимости позволит использовать УКВ-радиотелефонную связь.
Разработка СЗО ведется также и за рубежом: США (MRU), Великобританией (MIDAR) и др. Принцип их работы существенно не отличается от изложенного выше.
К судовым следует отнести также РМО с быстрым качанием частоты, используемые для оснащения спасательных средств РМО-С. Качание частоты в них осуществляется во всей полосе частот, отведенной для работы судовых навигационных РЛС 3-сантиметрового диапазона волн (9320—9500 МГц). Поэтому на экране ИКО всех РЛС, находящихся в зоне действия РМО-С, будет наблюдаться ответный сигнал.
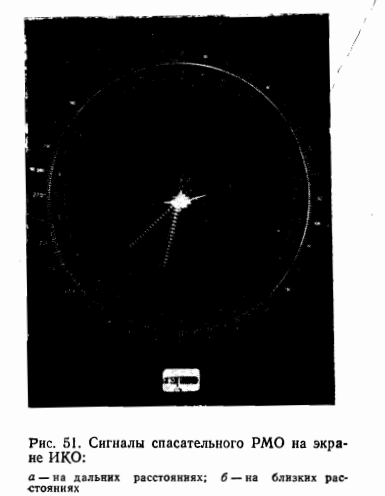
Для повышения радиолокационной наблюдаемости и привлечения внимания при проведении поисковых и спасательных работ сигнал отображается на ИКО в виде серии (около 20) оадиальных точек (рис. 51). При этом направление на объект, терпящий бедствие, определяется как продолжение этой линии до пересечения с азимутальной шкалой ИКО, а расстояние — по первой от начала развертки точке из серии. На близких расстояниях от РМО-С вследствие приема сигналов боковыми лепестками антенны РЛС возникают секторные и круговые засветки (см. рис. 51).
На рис. 52 показан внешний вид РМО-С типа «Melsweep» (Япония). В комплект спасательного ответчика входят: СВЧ-приемопе- редатчик со световым маяком, зуммер с индикатором работоспособности, две морские батареи питания. Приемопередатчик и зуммер водонепроницаемого исполнения, их общая масса около 700 г. Батареи обеспечивают работу ответчика в течение 40 ч. Они начинают работать, как только в них попадает морская вода. Одна батарея служит для питания электрических схем, а другая — лампочки светового маяка. Зуммер работает при облучении ответчика импульсами РЛС. Увеличение длительности звукового сигнала свидетельствует о приближении поискового судна, что оказывает положительный психологический эффект на терпящих бедствие и может служить основанием для использования других средств подачи сигнала бедствия. На небольших расстояниях, когда на экране ИКО РЛС наблюдаются секторные засветки, в ночное время поиск ведется визуально по сигналам светового маяка.
Результаты проведенных исследований показали, что использование РМО-С «Melsweep» позволяет увеличить дальность обнару жения спасательного плотика по сравнению с визуальным наблюдением (бинокль) днем в 3,5 раза, вечером в 5 раз, а ночью в 15— 20 раз.
Схема построения и принцип работы РМО-С аналогичны навигационным РМО с качанием частоты ответа (см. рис. 47).

|
|
|
